Шаговый двигатель em 142 схема
Чебоксары
Шаговые двигатели достаточны распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует много типов шаговых двигателей, но самыми дружелюбными в плане управления являются 2-х фазные униполярные двигатели.

Этот тип двигателей имеет две независимые обмотки с выводами от середины. Их можно встретить преимущественно в старой технике: принтерах, копирах, дисководах (5-и дюймовых) и еще много где.
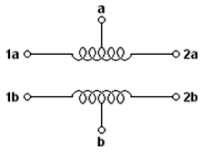
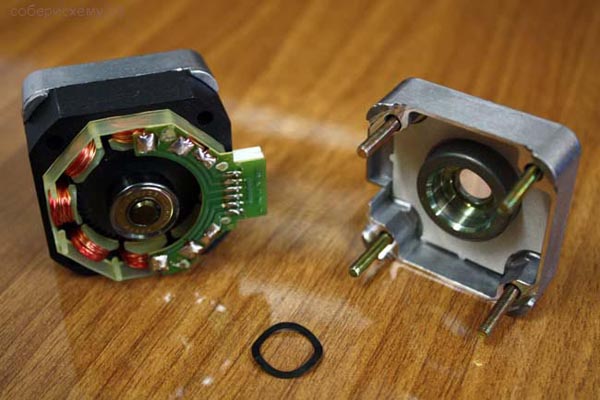
В зависимости от от того как соединены средние обмотки внутри, из двигателя могут выходить 5 или 6 проводов. Разницы никакой нет, все равно средние выводы обмоток соединяются вместе, ниже на фотографии разобран двигатель марки 17PM-H005-P2VA.

Характерной особенностью шаговых двигателей является дискретность поворота ротора, тоесть если взять и покрутить вал двигателя можно ощутить как он фиксируется в определенных моментах. Это и есть шаги двигателя.
При запитывании одной из половины обмоток происходит фиксирование вала двигателя в определенном положении. Если снять напряжение с этой обмотки и запитать другую, ротор повернется и зафиксируется в другом положении. Таким образом, если запитывать обмотки в определенной последовательности можно добиться вращения вала двигателя.
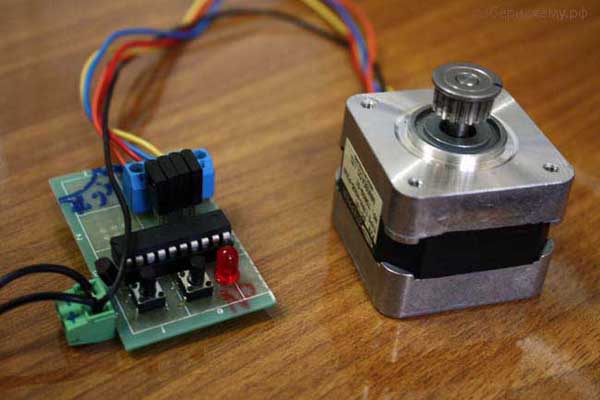
Схема контроллера ШД:
схему в большем разрешении.
Схема собрана на микроконтроллере ATtiny2313 и имеет две кнопки, при нажатии на одну вал двигателя будет крутиться в одну сторону, при нажатии другой — в другую. Красный светодиод загорается при нажатии одной из кнопок. В качестве ключевых транзисторов выбраны КТ829, их можно заменить на КТ972 — правда эти слабее и будут греться сильнее.
К клемме Udvig подключаются выводы от середин обмоток и туда же подводится напряжение для питания обмоток. Величина напряжения зависит от самого двигателя, для моего например по документации максимальный ток в обмотках 1,5 Ампера, измерив сопротивление обмоток получил 2 Ома, отсюда вывод что напряжение питания не должно превышать 3 В ну или немного больше, учитывая что запитываться будет индуктивная нагрузка. Кстати диоды D2-D5 стоят для того, чтобы гасить скачки обратного напряжения после закрытия транзистора. Иначе есть вероятность что ЭДС самоиндукции возникающая во время выключения питания обмотки пробъет транзистор.
Изменяя величину задержки между шагами, можно в больших пределах регулировать скорость вращения вала. При выбранной мной задержке в 1000 мкс с шаговиком имеющем 200 шагов на оборот (400 полушагов) скорость вращения получается примерно 2,5 оборота в секунду.
По материалам сайта
файлы проекта и файл печатной платы.
видео с демонстрацией работы схемы (
«Шаговый двигатель 28BYJ-48-5V с драйвером на ULN2003» — Урок № 8
Микросхема ULN2003 — описание
Краткое описание ULN2003a. Микросхема ULN2003a — это транзисторная сборка Дарлингтона с выходными ключами повышенной мощности, имеющая на выходах защитные диоды, которые предназначены для защиты управляющих электрических цепей от обратного выброса напряжения от индуктивной нагрузки.
Электрический паяльник с регулировкой температуры
Мощность: 60/80 Вт, температура: 200’C-450’C, высококачествен…
Каждый канал (пара Дарлингтона) в ULN2003 рассчитан на нагрузку 500 мА и выдерживает максимальный ток до 600 мА. Входы и выходы расположены в корпусе микросхемы друг напротив друга, что значительно облегчает разводку печатной платы.
Микросхема ULN2003 Готовый драйвер шагового двигателя на ULN2003
ULN2003 относится к семейству микросхем ULN200X. Различные версии этой микросхемы предназначены для определенной логики. В частности, микросхема ULN2003 предназначена для работы с TTL логикой (5В) и логических устройств CMOS. Широкое применение ULN2003 нашло в схемах управления широким спектром нагрузок, в качестве релейных драйверов, драйверов дисплея, линейных драйверов и т. д. ULN2003 также используется в драйверах шаговых двигателей.
Структурная схема ULN2003
Принципиальная схема

Микросхема ULN2003 Для управления двигателями, реле, маломощной нагрузкой….
Шаговый двигатель с драйвером Драйвер на микросхеме ULN2003, позволяет управл….
Шаговый двигатель для 3D принтера Две фазы, ток: 1,2А, шаг: 1,8, размер…
A4988 — драйвер шагового двигателя Простой интерфейс , шесть различных ступеней разрешения: п…
Характеристики
- Номинальный ток коллектора одного ключа — 0,5А;
- Максимальное напряжение на выходе до 50 В;
- Защитные диоды на выходах;
- Вход адаптирован к всевозможным видам логики;
- Возможность применения для управления реле.

#21. Подключаем к Arduino Шаговый двигатель 28BYJ-48 на драйвере ULN2003
Сегодня в уроке подключим шаговый двигатель 28BYJ-48 к Arduino и научимся вращать вал двигателя в разные стороны и изменять скорость вращения с помощью потенциометра и энкодера KY-040.
Кратко, что такое шаговый двигатель (ШД) — это двигатель, который способен осуществлять вращение на 1 шаг. Шаг — это угол, который обусловлен устройством каждого конкретного шагового двигателя.
Характеристики шагового двигателя 28BYJ-48:

Размера шагового двигателя 28BYJ-48. Необходимы при проектировании деталей для 3D печати.

Вот так выглядит схема шагового двигателя 28BYJ-48

Подавая сигналы в определённом порядке на выводы двигателя, двигатель можно вращать по часовой стрелке.
Для шагового режима.

Для полушагового режима.

Прямое подключение шагового двигателя 28BYJ-48 к Arduino.
В связи с тем, что двигатель 28BYJ-48 работает от 5в и при небольших токах, его можно подключить на прямую к Arduino.
Схема подключения к Arduino UNO будет следующая.

Для вращения ШД достаточно подавать сигналы по схеме, которую мы рассмотрели выше.
Для этого можно сделать массив подачи сигнала на пины микроконтроллера.

И в цикле выполнять каждую строчку массива. Но есть решение с более компактным кодом. Нашел я данный пример на канале Дмитрия Осипова. За что ему отельное спасибо!
Код для вращения в одну и в другую сторону будет вот таким.
ВНИМАНИЕ! Материалы для скачивания находятся внизу статьи!
Пример подключения шагового двигателя 28BYJ-48 (5V)с использованием драйвер ULN2003.
Также у Дмитрия Осипова есть код для изменения скорости вращения с помощью потенциометра. Я его немного доработал, сделал обработку нажатия кнопки без задержки в 500 мс. Сейчас двигатель стал вращаться в обратную сторону без видимой задержки.
Для подключения буду использовать модуль SBT0811 на драйвере ULN2003.

Драйвер устроен вот таким образом.

Соответственно, наш код будет работать и с данным драйвером.
Подключим все по схеме и загрузим код в Arduino NANO.

Схема подключения для Arduino UNO будет аналогичной.
Как видим, двигатель без проблем вращается по часовой стрелке и против часовой, при нажатии на кнопку вращается в противоположном направлении. При вращении потенциометра в одну сторону — скорость уменьшается, при вращении в противоположном направлении скорость увеличивается.
ВНИМАНИЕ! Материалы для скачивания находятся внизу статьи!
Пример управления шаговым двигателем 28BYJ-48 с помощью Энкодера.
Для уменьшения количества элементов в схеме решил заменить потенциометр и тактовую кнопку на энкодер вращения KY-040. Как подключить энкодер вращения к Arduino рассказывал в предыдущем уроке.
Подключаем шаговый двигатель 28BYJ-48 и энкодер к Arduino по схеме.

Проводим небольшую доработку кода и получим вот такой результат.

Если нажать на энкодер, меняется направление вращения. А при вращении энкодера по часовой стрелке — скорость увеличивается. Если вращать против часовой стрелки — скорость снижается.
ВНИМАНИЕ! Материалы для скачивания находятся внизу статьи!
Вы также можете без проблем воспользоваться примером из стандартной библиотеки Stepper, которая позволит сделать тоже самое и при меньшем объёме кода. Но библиотека не даст вам понять, как это все устроено.

А вот сам пример вращения в одну сторону, а затем в другую с использованием библиотеки Stepper.

На основе данного примера можно реализовать управление не только одним шаговым двигателем, а несколькими. Причем, каждый двигатель будет выполнять свои действия не зависимо от других. В планах сделать пару проектов с использованием данного шагового двигателя.
Пишите в комментариях, что бы вы хотели сделать на шаговых двигателях, и какие примеры вас интересуют. Чем больше будет откликов, тем чаше будут выходить проекты и уроки на сайте.
Не забывайте подписываться на канал Youtube и вступайте в группы в Вконтакте и Facebook.
Всем Пока-Пока.
И до встречи в следующем уроке
Понравилась статья? Поделитесь ею с друзьями:
Файлы для скачивания
| управления шаговым двигателем 28BYJ-48 с помощью Энкодера.ino | 4 Kb | 368 | Вы можете скачать файл. |
| управления шаговым двигателем 28BYJ-48 с помощью кнопки и потенциометра .ino | 5 Kb | 333 | Вы можете скачать файл. |
| с использованием библиотеки Stepper.ino | 1 Kb | 272 | Вы можете скачать файл. |
| Даташит на шаговый двигатель 28BYJ-48.pdf | 193 Kb | 182 | Вы можете скачать файл. |
Скетч для управления мотором 28BYJ-48 с помощью arduino
Для работы с шаговыми моторами существует несколько библиотек, одна из них даже есть в стандартном наборе IDE, но на мой взгляд удобнее всего использовать AccelStepper. Скачать ее можно по этой ссылке: . Ниже приведен код скетча с подробными комментариями.
// библиотека для управления мотором #include // пины #define motorPin1 8 // IN1 на драйвере ULN2003 #define motorPin2 9 // IN2 на драйвере ULN2003 #define motorPin3 10 // IN3 на драйвере ULN2003 #define motorPin4 11 // IN4 на драйвере ULN2003 int analog_pin = A0; // пин для потенциометра // подключение мотора // пины и количество шагов на оборот(8) AccelStepper stepper_motor(8, motorPin1, motorPin3, motorPin2, motorPin4); void setup() < // максимальная скорость мотора stepper_motor.setMaxSpeed(500); // дефолтная скорость мотора stepper_motor.setSpeed(200); >void loop()< // читаем значение с потенциометра int val_a = analogRead(analog_pin); // получаем скорость(от 50 до 500) относительно значения потенциометра(от 0 до 1023) int motorSpeed = map(val_a, 0, 1023, 50, 500); // задаем скорость мотору stepper_motor.setSpeed(motorSpeed); // вращаем мотор stepper_motor.runSpeed(); >
Описание, характеристики и схема включения стабилизатора напряжения КРЕН 142
КРЕН, «кренка» — бытовое название интегральных стабилизаторов напряжения серии 142. Размеры её корпуса не позволяют нанести полную маркировку серии (КР142ЕН5А и т.п.), поэтому разработчики ограничились кратким вариантом – КРЕН5А. «Кренки» получили широкое распространение как в промышленности, так и в любительской практике.
Что из себя представляют стабилизаторы напряжения КРЕН 142
Микросхемы серии 142 завоевали популярность из-за простоты получения стабильного напряжения – несложная обвязка, отсутствие регулировок и настроек. Достаточно подать питание на вход, и получить стабилизированное напряжение на выходе. Наибольшую известность и распространение получили нерегулируемые интегральные стабилизаторы в корпусах ТО-220 на напряжение до 15 вольт:
- КР142ЕН5А, В – 5 вольт;
- КР142ЕН5Б, Г – 6 вольт;
- КР142ЕН8А, Г – 9 вольт;
- КР142ЕН8Б, Д – 12 вольт;
- КР142 ЕН8В, Е – 15 вольт;
- КР142 ЕН8Ж, И – 12,8 вольт.
В случаях, когда надо получить более высокое стабильное напряжение, применяются приборы:
- КР142ЕН9А – 20 вольт;
- КР42ЕН9Б – 24 вольта;
- КР142ЕН9В – 27 вольт.
Эти микросхемы также выпускаются в планарном исполнении с несколько отличающимися электрическими характеристиками.
Серия 142 включает в себя и другие интегральные стабилизаторы. К микросхемам с регулируемым выходным напряжением относятся:
- КР142ЕН1А, Б – с пределами регулирования от 3 до 12 вольт;
- КР142ЕН2Б – с пределами 12…30 вольт.
Эти приборы выпускаются в корпусах с 14 выводами. Также в эту категорию входят трехвыводные стабилизаторы с одинаковым выходным диапазоном 1,2 – 37 вольт:
- КР142ЕН12 положительной полярности;
- КР142ЕН18 отрицательной полярности.
В серию входит микросхема КР142ЕН6 – двуполярный стабилизатор с возможностью регулировки выходного напряжения от 5 до 15 вольт, а также включение в качестве нерегулируемого источника ±15 вольт.
Все элементы серии имеют встроенную защиту от перегрева и короткого замыкания на выходе. А переполюсовку по входу и подачу внешнего напряжения на выход они не любят – время жизни в таких случаях исчисляется секундами.
Модификации микросхемы
Модификации микросхем, входящих в серию, отличаются корпусом. Большинство однополярных нерегулируемых стабилизаторов выполнено в «транзисторном» корпусе TO-220. Он имеет три вывода, этого хватает не во всех случаях. Поэтому часть микросхем выпускались в многовыводных корпусах:
- DIP-14;
- 4-2 – то же самое, но в керамической оболочке;
- 16-15.01 – планарный корпус для монтажа на поверхность (SMD).
В таких исполнениях выпускаются, в основном, регулируемые и двуполярные стабилизаторы.
Основные технические характеристики
Кроме выходного напряжения, для стабилизатора важен ток, который он может обеспечить под нагрузкой.
| Тип микросхемы | Номинальный ток, А |
|---|---|
| К(Р)142ЕН1(2) | 0,15 |
| К142ЕН5А, 142ЕН5А | 3 |
| КР142ЕН5А | 2 |
| К142ЕН5Б, 142ЕН5Б | 3 |
| КР142ЕН5А | 2 |
| К142ЕН5В, 142ЕН5В, КР142ЕН5В | 2 |
| К142ЕН5Г, 142ЕН5Г, КР142ЕН5Г | 2 |
| К142ЕН8А, 142ЕН8А, КР142ЕН8А | 1,5 |
| К142ЕН8Б, 142ЕН8Б, КР142ЕН8Б | 1,5 |
| К142ЕН8В, 142ЕН8В, КР142ЕН8В | 1,5 |
| КР142ЕН8Г | 1 |
| КР142ЕН8Д | 1 |
| КР142ЕН8Е | 1 |
| КР142ЕН8Ж | 1,5 |
| КР142ЕН8И | 1 |
| К142ЕН9А, 142ЕН9А | 1,5 |
| К142ЕН9Б, 142ЕН9Б | 1,5 |
| К142ЕН9В, 142ЕН9В | 1,5 |
| КР142ЕН18 | 1,5 |
| КР142ЕН12 | 1,5 |
Этих данных достаточно для предварительного решения о возможности применения того или иного стабилизатора. Если нужны дополнительные характеристики, их можно найти в справочниках или в интернете.
Назначение выводов и принцип работы
По принципу работы все микросхемы серии относятся к линейным регуляторам. Это означает, что входное напряжение распределяется между регулирующим элементом (транзистором) стабилизатора и нагрузкой так, что на нагрузке падает напряжение, которое задается внутренними элементами микросхемы или внешними цепями.
Если входное напряжение увеличивается, транзистор прикрывается, если уменьшается – приоткрывается таким образом, чтобы на выходе напряжение оставалось постоянным. При изменении тока нагрузки стабилизатор отрабатывает так же, поддерживая неизменным напряжение нагрузки.

У этой схемы есть недостатки:
- Через регулирующий элемент постоянно протекает ток нагрузки, поэтому на нём постоянно рассеивается мощность P=Uрегулятора⋅Iнагрузки. Эта мощность расходуется впустую, и ограничивает КПД системы – он не может быть выше Uнагрузки/ Uрегулятора.
- Напряжение на входе должно превышать напряжение стабилизации.
Но простота применения, дешевизна прибора перевешивают недостатки, и в диапазоне рабочих токов до 3 А (и даже выше) что-то более сложное применять бессмысленно.

У регуляторов напряжения с фиксированным напряжением, а также у регулируемых стабилизаторов новых разработок (К142ЕН12, К142ЕН18) в трех- и четырехвыводном исполнении выводы обозначаются цифрами 17,8,2. Такое нелогичное сочетание выбрано, очевидно, для соответствия выводов с микросхемами в корпусах DIP. На самом деле такая «дремучая» маркировка сохранилась только в технической документации, а на схемах пользуются обозначениями выводов, соответствующим зарубежным аналогам.
| Обозначение по технической документации | Обозначение на схемах | Назначение вывода | ||
|---|---|---|---|---|
| Стабилизатор с фиксированным напряжением | Стабилизатор с регулируемым напряжением | Стабилизатор с фиксированным напряжением | Стабилизатор с регулируемым напряжением | |
| 17 | In | Вход | ||
| 8 | GND | ADJ | Общий провод | Опорное напряжение |
| 2 | Out | Выход | ||
Микросхемы старой разработки К142ЕН1(2) в 16-выводных планарных корпусах имеют следующее назначение выводов:
| Назначение | Номер вывода | Номер вывода | Назначение |
|---|---|---|---|
| Не используется | 1 | 16 | Вход 2 |
| Фильтр шума | 2 | 15 | Не используется |
| Не используется | 3 | 14 | Выход |
| Вход | 4 | 13 | Выход |
| Не используется | 5 | 12 | Регулировка напряжения |
| Опорное напряжение | 6 | 11 | Токовая защита |
| Не используется | 7 | 10 | Токовая защита |
| Общий | 8 | 9 | Выключение |
Недостатком планарного исполнения служит большое количество излишних выводов прибора.
Стабилизаторы КР142ЕН1(2) в корпусах DIP14 имеют другое назначение выводов.
| Назначение | Номер вывода | Номер вывода | Назначение |
|---|---|---|---|
| Токовая защита | 1 | 14 | Выключение |
| Токовая защита | 2 | 13 | Цепи коррекции |
| Обратная связь | 3 | 12 | Вход 1 |
| Вход | 4 | 11 | Вход 2 |
| Опорное напряжение | 5 | 10 | Выход 2 |
| Не используется | 6 | 9 | Не используется |
| Общий | 7 | 8 | Выход 1 |
У микросхем К142ЕН6 и КР142ЕН6, выпускаемых в разных вариантах корпуса с теплоотводом и однорядным расположением выводов, цоколёвка следующая:
| Номер вывода | Назначение |
|---|---|
| 1 | Вход сигнала регулировки обоих плеч |
| 2 | Выход «-» |
| 3 | Вход «-» |
| 4 | Общий |
| 5 | Коррекция «+» |
| 6 | Не используется |
| 7 | Выход «+» |
| 8 | Вход «+» |
| 9 | Коррекция «-» |
Пример типовой схемы подключения
Для всех нерегулируемых однополярных стабилизаторов типовая схема одинакова:

С1 должен иметь ёмкость от 0,33 мкФ, С2 – от 0,1. В качестве С1 может быть использован фильтрующий конденсатор выпрямителя, если проводники от него до входа стабилизатора имеют длину не более 70 мм.
Двуполярный стабилизатор К142ЕН6 обычно включается так:

Для микросхем К142ЕН12 и ЕН18 напряжение на выходе устанавливается резисторами R1 и R2.

Для К142ЕН1(2) типовая схема включения выглядит сложнее:

Кроме типовых схем включения интегральные для стабилизаторов серии 142 существуют и другие варианты, позволяющие расширить область применения микросхем.
Какие существуют аналоги
Для некоторых приборов серии 142 существуют полные зарубежные аналоги:
| Микросхема К142 | Зарубежный аналог |
|---|---|
| КРЕН12 | LM317 |
| КРЕН18 | LM337 |
| КРЕН5А | (LM)7805C |
| КРЕН5Б | (LM)7805C |
| КРЕН8А | (LM)7806C |
| КРЕН8Б | (LM)7809C |
| КРЕН8В | (LM)78012C |
| КРЕН6 | (LM)78015C |
| КРЕН2Б | UA723C |
Полный аналог означает, что микросхемы совпадают по электрическим характеристикам, по корпусу и расположению выводов. Но существуют еще и функциональные аналоги, которые во многих случаях замещают проектную микросхему. Так, 142ЕН5А в планарном корпусе не является полным аналогом 7805, но по характеристикам ей соответствует. Поэтому, если есть возможность установить один корпус вместо другого, то такая замена не ухудшит качество работы всего устройства.
Другая ситуация – КРЕН8Г в «транзисторном» исполнении не считается аналогом 7809 из-за того, что имеет меньший ток стабилизации (1 ампер против 1,5). Если это не критично и фактический потребляемый ток по цепи питания меньше 1 А (с запасом), то смело можно менять LM7809 на КР142ЕН8Г. И в каждом конкретном случае всегда надо прибегать к помощи справочника – зачастую можно подобрать что-то похожее по функционалу.
Как проверить работоспособность микросхем КРЕН
Микросхемы серии 142 имеют достаточно сложное устройство, поэтому мультиметром однозначно проверить её работоспособность невозможно. Единственный способ – собрать макет реального включения (на плате или навесным монтажом), который включает в себя, как минимум, входную и выходные ёмкости, подать на вход питание и проверить напряжение на выходе. Оно должно соответствовать паспортному.
Несмотря на доминирование на рынке микросхем зарубежного производства, приборы серии 142 удерживают свои позиции за счет качества изготовления и других потребительских свойств.

Описание характеристик, назначение выводов и примеры схем включения линейного стабилизатора напряжения LM317

Как работает микросхема TL431, схемы включения, описание характеристик и проверка на работоспособность

Описание, технические характеристики и аналоги выпрямительных диодов серии 1N4001-1N4007

Что такое диодный мост, принцип его работы и схема подключения

Режимы работы, описание характеристик и назначение выводов микросхемы NE555

Защита от перенапряжения: что лучше стабилизатор или реле контроля напряжения?
Схема и сборка контроллера для ЧПУ станка
У умельцев, которые пытаются сами собрать программируемый станок, часто возникает проблема: как выбрать для него контроллер управления шаговыми двигателями. Понятно, что их интересует схема этого устройства.
Среди большого разнообразия контроллеров, пользователи ищут для самостоятельной сборки те схемы, которые будут приемлемы и наиболее эффективны. Применяются и одноканальные устройства и многоканальные: 3-х и 4-х осевой контроллеры.
Варианты устройств
Многоканальные контроллеры ШД (шаговых двигателей) при типоразмерах 42 или 57 мм используется в случае небольшого рабочего поля станка – до 1 м. Когда собирают станок большего рабочего поля – свыше 1м, нужен типоразмер 86 мм. Управлять ним можно, пользуясь одноканальным драйвером (ток управления, превышающий 4,2 А).
Управлять станком с числовым программным управлением, в частности, фрезерным настольным можно контроллером, созданным на базе специализированных микросхем –драйверов, предназначенных к применению для ШД до 3А. Контроллер ЧПУ станка управляется спецпрограммой. Ее устанавливают на ПК, имеющий частоту процессора свыше 1GHz, а объем памяти 1 Гб). При меньшем объеме, систему оптимизируют.
ОБРАТИТЕ ВНИМАНИЕ! Если сравнивать с ноутбуком, то в случае подключения стационарного компьютера – лучшие результаты, да и обходится он дешевле.
Подключая контроллер к компьютеру, используют USB или разъем параллельного порта LPT. Если этих портов нет, то пользуются платами-расширителями или контроллерами-преобразователями.

Экскурс в историю
Вехи техпрогресса схематически можно обозначить так:
- У первого контроллера на микросхеме был условно назван «синей платой». У этого варианта есть недостатки и схема требовала доработки. Главное достоинство – есть разъем, к нему и подключали пульт управления.
- Вслед за синим, появился контроллер, называемый «красной платой». В нём уже использовались быстрые (высокочастотные) оптроны, реле шпинделя на 10А, развязка по питанию (гальваническая) и разъем, куда бы подключались драйверы четвертой оси.
- Применялось также еще одно подобное устройство с красной маркировкой, но более упрощенное. При его помощи можно было управлять небольшим станком настольного типа – из числа 3-осевых.
- Следующим в линейке техпрогресса стал контроллер с гальванической развязкой по питанию, быстрыми оптронами и особыми конденсаторами, имеющий алюминиевый корпус, который обеспечивал защиту от пыли. Вместо реле управления, которое включало бы шпиндель, в конструкции было два выхода и возможность, чтобы подключить реле или ШИМ (широтно-импульсная модуляция) управление скоростью вращения.
- Сейчас же для изготовления самодельного фрезерно-гравировального станка, имеющего ШД, есть варианты – 4-х осевой контроллер, драйвер ШД от Allegro, одноканальный драйвер для станка, имеющего большое рабочее поле.
ВАЖНО! Не стоит перегружать ШД, применяя крупную фрезу агрегата и большую скорость.

Контроллер из подручных материалов
Большинство умельцев предпочитают управление через LPT порт для большинства программ управления любительского уровня. Вместо применения комплекта спецмикросхем для этой цели, кое-кто строит контроллер из подручных материалов – полевых транзисторов из сгоревших материнских плат (при напряжении свыше 30 вольт и током больше 2 ампер).
А поскольку создавался станок для нарезания пенопласта, в качестве ограничителя тока изобретатель использовал автомобильные лампы накаливания, а ШД снимали со старых принтеров или сканеров. Такой контроллер устанавливали без изменений в схеме.
Чтобы сделать простейший станок ЧПУ своими руками, разбирая сканер, помимо ШД, извлекается и микросхема ULN2003, и два стальные прутки, они пойдут на тестовый портал. К тому же понадобятся:
- Коробка из картона (из нее смонтируют корпус устройства). Возможен вариант с текстолитом или фанерным листом, но картон резать легче; куски древесины;
- инструменты – в виде кусачек, ножниц, отверток; клеевой пистолет и паяльные принадлежности;
- вариант платы, которая подходит на самодельный ЧПУ станок;
- разъем для LPT порта;
- гнездо в форме цилиндра для обустройства блока питания;
- элементы соединения – стержни с резьбой, гайки, шайбы и шурупы;
- программа для TurboCNC.
Сборка самодельного устройства
Приступив к работе над самодельным контроллером для чпу, первый шаг – аккуратно припаять микросхему на макетную плату с двумя шинами электропитания. Дальше последует соединение вывода ULN2003 и коннектора LPT. Далее оставшиеся выводы подключаем по схеме. Нулевой вывод (25-ый параллельного порта) соединяется с отрицательным на шине питания платы.
Затем ШД соединяют с устройством управления, а гнездо для электропитания – с соответствующей шиной. Для надёжности соединений проводов выполняют их фиксацию термоклеем.
Не составит труда подключение Turbo CNC. Программа эффективна с MS-DOS, совместима и с Windows, но в этом случае возможны некоторые ошибки и сбои.

Настроив программу на работу с контроллером, можно изготовить тестовую ось. Последовательность действий по подключению станков такова:
- В отверстия, просверленные на одном уровне в трех деревянных брусках, вставляют прутки из стали и закрепляют шурупами небольшого размера.
- ШД соединяют со вторым бруском, надевая его на свободные концы прутов и прикручивают, применяя шурупы.
- Через третье отверстие продевается ходовой винт и ставится гайка. Винт, вставленный в отверстие второго бруска, завинчивают до упора, чтобы он, пройдя через эти отверстия, вышел на вал двигателя.
- Далее предстоит соединение стержня с валом двигателя отрезком шланга из резины и проволочным зажимом.
- Для крепления ходовой гайки нужны дополнительные винты.
- Сделанная подставка также крепится к второму бруску при помощи шурупов. Горизонтальный уровень регулируется дополнительными винтами и гайками.
- Обычно вместе с контроллерами подключаются и двигатели и тестируются на предмет правильного соединения. Далее следует проверка масштабирования ЧПУ, прогонка тестовой программы.
- Остается сделать корпус устройства и это будет завершающим этапом работы тех, кто созидает самодельные станки.

Программируя работу 3-осевого станка, в настройках по первым двум осям – без перемен. А вот при программировании первых 4-х фаз третьей – вводятся изменения.
Внимание! Используя упрощенную схему контроллера ATMega32 (Приложение 1), в отдельных случаях можно столкнуться с некорректной обработкой оси Z – режим полушага. А вот в полной версии его платы (Приложение 2), токи осей регулируются внешним аппаратным ШИМом.
Заключение
В контроллерах, собранных ЧПУ станков – широкий спектр использования: в плоттерах, небольших фрезерах, работающих с древесиной и пластиковыми деталями, граверах по стали, миниатюрных сверлильных станках.
Устройства с осевым функционалом используют также в графопостроителях, на них можно рисовать и изготовлять печатные платы. Так что усилия, затраченные на сборку мастерами-умельцами, в будущем контроллере обязательно окупятся.