L298n не работает один двигатель
Драйверы двигателя L298N, L293D и Arduino Motor Shield
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 1 | Поворот мотора вправо | ||
| 1 | 1 | Поворот мотора влево | ||
| Свободное вращение | ||||
| 1 | 1 | Торможение | ||
| 1 | 1 | Торможение | ||
| 1 | 1 | Короткое замыкание | ||
| 1 | 1 | Короткое замыкание |




Собираем Motor Shield
Мотор шилды продаются как в собранном так и в разобранном состоянии. Кроме того, по данной инструкции вы можете собрать шилд самостоятельно, если у вас есть необходимые радиодетали. Если вам достался собранный мотор шилд, можете смело пропустить этот раздел.
Необходимые инструменты
Ниже приведен перечень инструментов, которые понадобятся для сборки мотор шилда. По сути это стандартный набор, который вам пригодится и в дальнейшем, если вы начали увлекаться схемотехникой/электротехникой/Arduino.

Очень облегчит вашу жизнь хорошее жало. Так что рекомендуем на этом не экономить.

Без него припаять ничего не получится. Так что при походе в магазин, не забудьте.

Вам понадобится стандартный мультиметр для измерения напряжения и силы тока.

Опять таки очень сильно облегчат процесс прототипирования.

Не обязательная вещь, но очень полезный инструмент для пайки микросхем и небольших плат.
Управление двигателем постоянного тока с применением драйвера l298n и arduino uno
L298N и шаговый двигатель
Для нашего примера мы используем шаговый двигатель Nema 17, у которого четыре кабеля для подключения.
|
| шаговый двигатель |
Этот двигатель имеет 200 шагов на оборот и может работать с частотой вращения 60 об/мин. Если вы используете другой шаговый двигатель, уточните шаг его шаг и максимальную частоту вращения. Эти параметры понадобятся вам при программировании Arduino.
Еще один важный момент — определить какие именно кабели соответствуют A+, A-, B+ и B-. В нашем примере соответствующие цвета кабелей: красный, зеленый, желтый и голубой. Переходим к подключению.
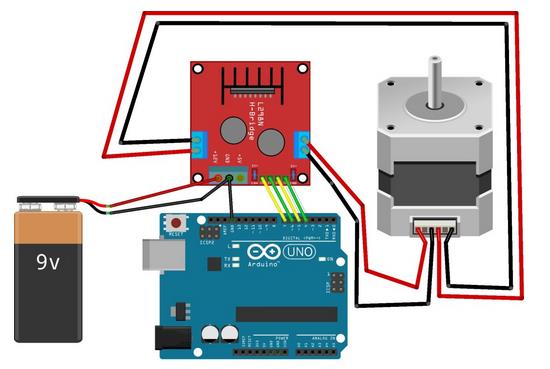
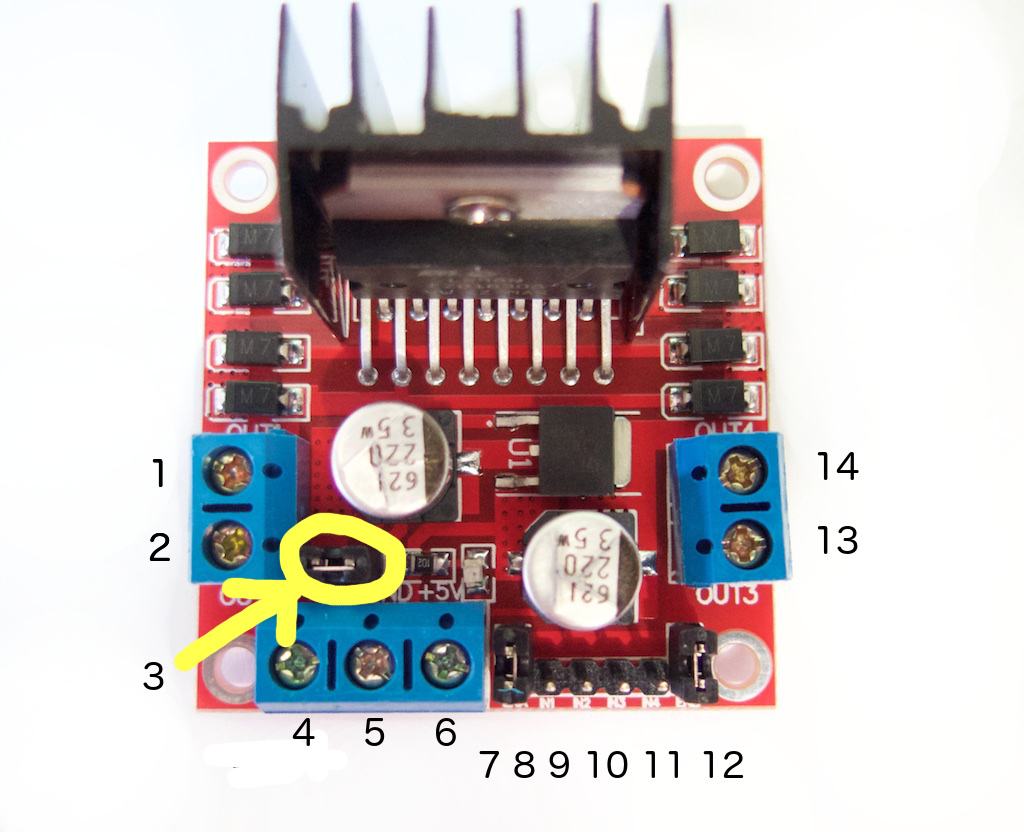
Кабели A+, A-, B+ и B- от шагового двигателя подключаем к пинам 1, 2, 13 и 14 соответственно. Контакты на коннекторах 7 и 12 на контроллере L298N оставьте замкнутыми. После этого подключите источник питания к пину 4 (плюс) и 5 (минус) на контроллере.
Опять таки, если источник питания меньше 12 вольт, контакт, отмеченный 3 на рисунке модуля, можно оставить замкнутым. После этого, подключите пины модуля L298N IN1, IN2, IN3 и IN4 к соответствующим цифровым пинам D8, D9, D10 и D11 на Arduino.
Теперь подключаем GND пин с Arduino к пину 5 на контроллере, а 5V к 6 пину на модуле. С управлением шагового двигателя проблем быть не должно благодаря встроенной в Arduino IDE библиотеке Stepper Library.
|
| Схема подключения L298N и шагового двигателя к Arduino |
Для проверки работоспособности просто загрузите скетч stepper_oneRevolution, который входит в состав библиотеки. Данный пример находится в меню
File > Examples > Stepper в Arduino IDE.
PWM DC Motor Control
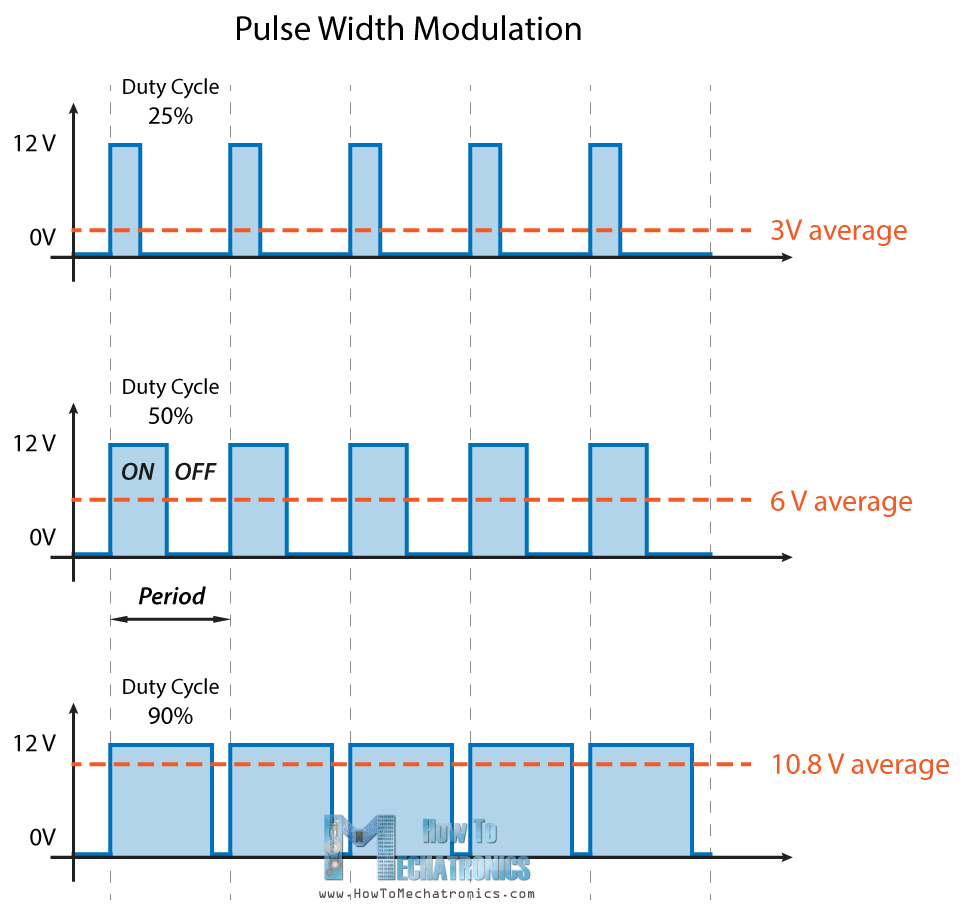
PWM, or pulse width modulation is a technique which allows us to adjust the average value of the voltage that’s going to the electronic device by turning on and off the power at a fast rate. The average voltage depends on the duty cycle, or the amount of time the signal is ON versus the amount of time the signal is OFF in a single period of time.
So depending on the size of the motor, we can simply connect an Arduino PWM output to the base of transistor or the gate of a MOSFET and control the speed of the motor by controlling the PWM output. The low power Arduino PWM signal switches on and off the gate at the MOSFET through which the high power motor is driven.
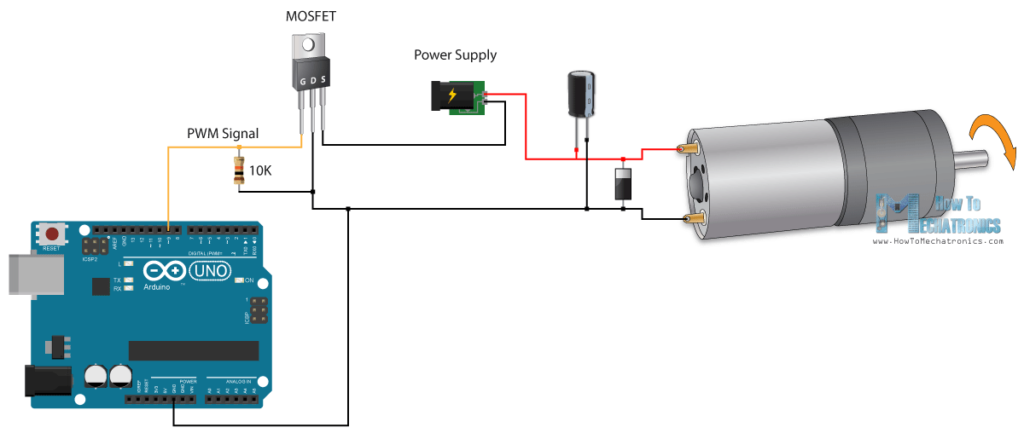
Note: Arduino GND and the motor power supply GND should be connected together.
Управление двигателем постоянного тока с использованием Н-моста
Если рассмотреть принцип действия, то Н-мост представляет собой логическую схему из четырех логических элементов (релейного или полупроводникового типа), способных переходить в два состояния (открытое и закрытое). В данном примере рассматривается мост собранный на полупроводниках. Простым изменением попарного состояния этих элементов двигатель будет вращаться то в одну, то в другую сторону без необходимости переключения его контактов.
Свое название данное устройство получило за счет внешнего сходства с буквой «Н», где каждая пара транзисторов находится в вертикальных элементах буквы, а непосредственно сам управляемый мотор в горизонтальном. Пример элементарного Н-моста из четырех транзисторов приведен на рисунке ниже. Попарно открывая и закрывая нужные элементы схемы, вы сможете пропускать ток через обмотки в противоположных направлениях.
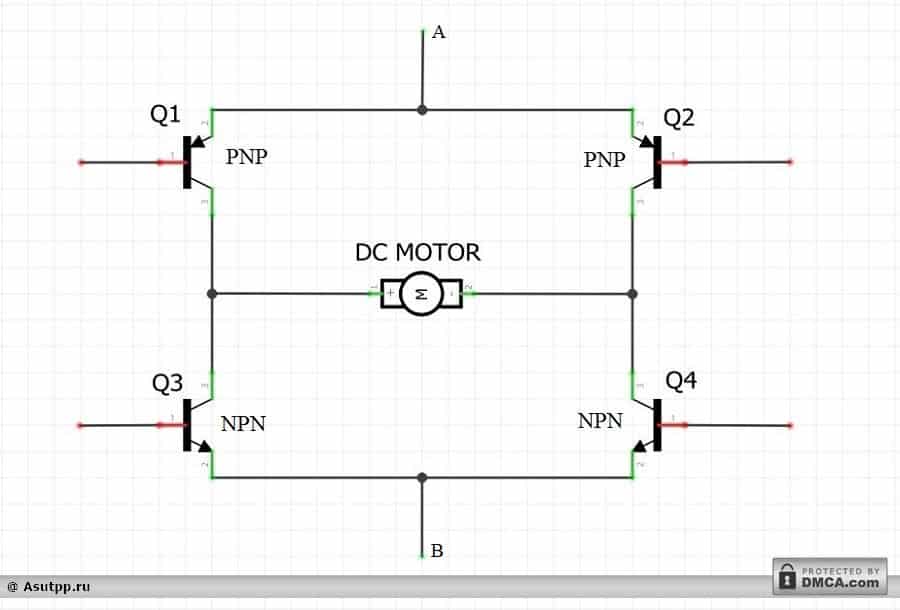 Схема H-моста
Схема H-моста
Посмотрите на рисунок, в этой схеме управление питанием двигателя происходит от выводов А и В, на которые подается управляющий потенциал.
Принцип определения направления вращения в Н-мосте происходит следующим образом:
- при подаче на базы транзисторов Q1 и Q4 импульса для открытия перехода происходит протекание тока по обмоткам двигателя в одном направлении;
- при подаче на базы транзисторов Q2 и Q3 импульса для открытия перехода ток будет протекать в противоположном направлении, в сравнении с предыдущим и произойдет реверсивное движение;
- попарное открытие транзисторов Q1 и Q3, Q2 и Q4 приводит к торможению ротора;
- открытие транзисторов в последовательности Q1 и Q2 или Q3 и Q4 совершенно недопустимо, поскольку оно приведет к возникновению короткого замыкания в цепи.
Применяя схему Н-моста для управления работой двигателя постоянного тока, вы сможете реализовать полный набор операций для электрической машины без необходимости переподключения ее выводов. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. Среди них наиболее популярными являются драйверы L293D и L298N.
Сравнивая оба драйвера, следует отметить, что L298N превосходит L293D как по параметрам работы, так и по доступным опциям. Несмотря на то, что L293D более дешевая модель, L298N, ввиду значительных преимуществ, стал использоваться куда чаще. Поэтому в данном примере мы рассмотрим принцип управления двигателем при помощи драйвера L298N и платы Arduino.
Introduction: L298N MOTOR DRIVER MODULE
More by the author:
More About HarshS91 »
This is an instructable on how to control a DC motor and run a bipolar stepper motor by using the L298N motor driver module.Whenever we use the DC motors for any project the main points are,
- speed of DC motor,
- The direction of the DC motor.
This could be achieved by using the motor diver module so, I use the L298N motor driver module because it is cheap and easy to use.
Supplies:
why we will use a motor driver/motor driver module?
because the microcontroller was not delivering a specific amount of current and voltage which will reruired for motors etc.
Готовые модули на L298
В интернете можно заказать готовый модуль на L298, правда в нем будет 6 входов для управления.
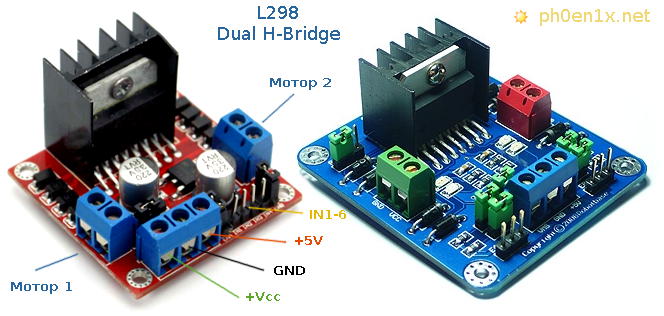
Рис. 6. Готовые модули на L298.
Я для своих нужд приобрел готовый модуль по типу как на рисунке слева. В нем присутствует микросхема L298 и небольшой стабилизатор для подачи +5В на логику микросхемы.
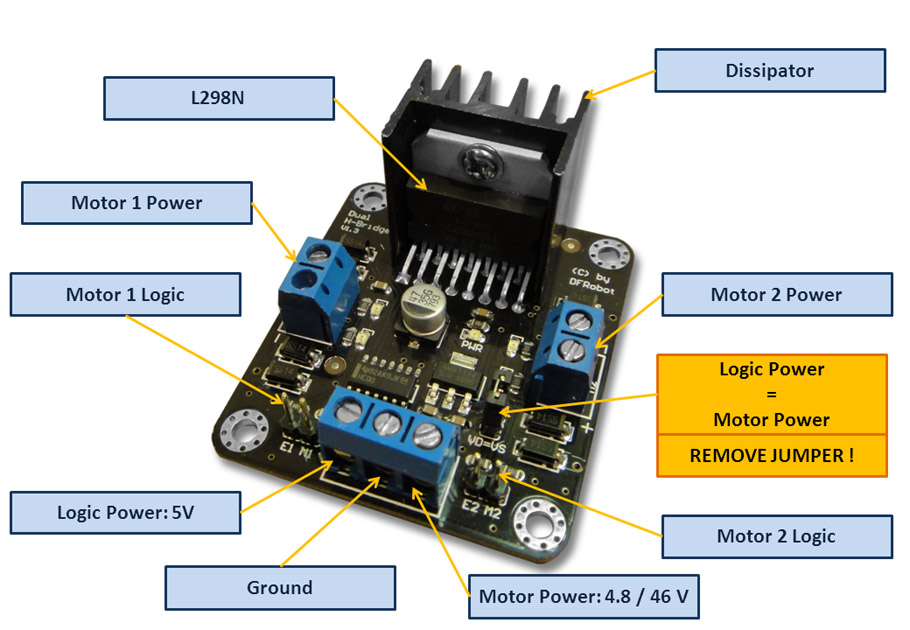
Для подключения данной платки важно четко уяснить одну особенность:
- Если для питания двигателей используется напряжение более чем 12В то перемычку нужно убрать и подавать отдельно 5В на выделенный для этого коннектор
- Если питание двигателей будет осуществляться от напряжения 5-12В то перемычку нужно утсановить и дополнительное питание 5В не понадобится.
Если же подать на двигатели, например 20В и оставить перемычку установленной, то на модуле выгорит микросхемка-стабилизатор на 5В. Почему разработчики не установили интегральный стабилизатор с более широким диапазоном входных напряжений — не понятно.
Для того чтобы сэкономить два входа при подключении такого блока к Arduino или Raspberry Pi можно добавить часть схемы на CD4001, как на рисунке 5.
Sketch code
L298N, Arduino и двигатель постоянного тока
Данный модуль дает возможность управлять одним или двумя двигателями постоянного тока. Для начала, подключите двигатели к пинам A и B на контроллере L298N.
Если вы используете в проекте несколько двигателей, убедитесь, что у них выдержана одинаковая полярность при подключении. Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Поверьте, с точки зрения программирования Arduino это неудобно.
После этого подключите источник питания. Плюс — к четвертому пину на L298N, минус (GND) — к 5 пину. Если ваш источник питания до 12 вольт, коннектор, отмеченный 3 на рисунке выше, можно оставить. При этом будет возможность использовать 5 вольтовый пин 6 с модуля.
Данный пин можно использовать для питания Arduino. При этом не забудьте подключить пин GND с микроконтроллера к 5 пину на L298N для замыкания цепи. Теперь вам понадобится 6 цифровых пинов на Arduino. Причем некоторые пины должны поддерживать ШИМ-модуляцию.
ШИМ-пины обозначены знаком “
” рядом с порядковым номером.
Теперь подключите цифровые пины Arduino к драйверу. В нашем примере два двигателя постоянного тока, так что цифровые пины D9, D8, D7 и D6 будут подключены к пинам IN1, IN2, IN3 и IN4 соответственно. После этого подключите пин D10 к пину 7 на L298N (предварительно убрав коннектор) и D5 к пину 12 (опять таки, убрав коннектор).
Направление вращения ротора двигателя управляется сигналами HIGH или LOW на каждый привод (или канал). Например, для первого мотора, HIGH на IN1 и LOW на IN2 обеспечит вращение в одном направлении, а LOW и HIGH заставит вращаться в противоположную сторону.
При этом двигатели не будут вращаться, пока не будет сигнала HIGH на пине 7 для первого двигателя или на 12 пине для второго. Остановить их вращение можно подачей сигнала LOW на те же указанные выше пины. Для управления скоростью вращения используется ШИМ-сигнал.
Скетч приведенный ниже, отрабатывает в соответствии со схемой подключения, которую мы рассматривали выше. Двигатели постоянного тока и Arduino питаются от внешнего источника питания.
// подключите пины контроллера к цифровым пинам Arduino
Arduino + Stepper (L298N)
By telleropnul, October 25, 2016
Description
Bipolar stepper motors always have only 4 wires. Bipolar stepper motors always have 2 coils. By driving the current in seperate directions through each of the coils, we can have a total of 4 different states:
- Coil A current flowing ‘left to right’.
- Coil A current flowing ‘right to left’.
- Coil B current flowing ‘left to right’.
- Coil B current flowing ‘right to left’.
Note that the number of poles inside a stepper motor is often greater than just 2; individual physical poles inside the stepper motor are wired in series to create 2 coils / 4 wires you see in schematics.
Bipolar stepper motors require a dual H-bridge to drive them; one H-bridge for each coil. Bipolar motors offer increased torque compared to unipolar motors. Flyback diodes are required to prevent voltage spikes when the power to the coil is turned off and the stepper motor acts like a generator briefly (back-emf).
Note: You can also connect 5,6 or 8 wire unipolar motors and connect them as bipolar motors by not connecting the common lead(s). They will not have as much torque as bipolar motors due to thinner wire with a higher electrical resistance used in the coils (bifilar windings).
Hardware Required
- Arduino Board
- L298N stepper driver board
- Bipolar stepper motor (i.e. NEMA17)
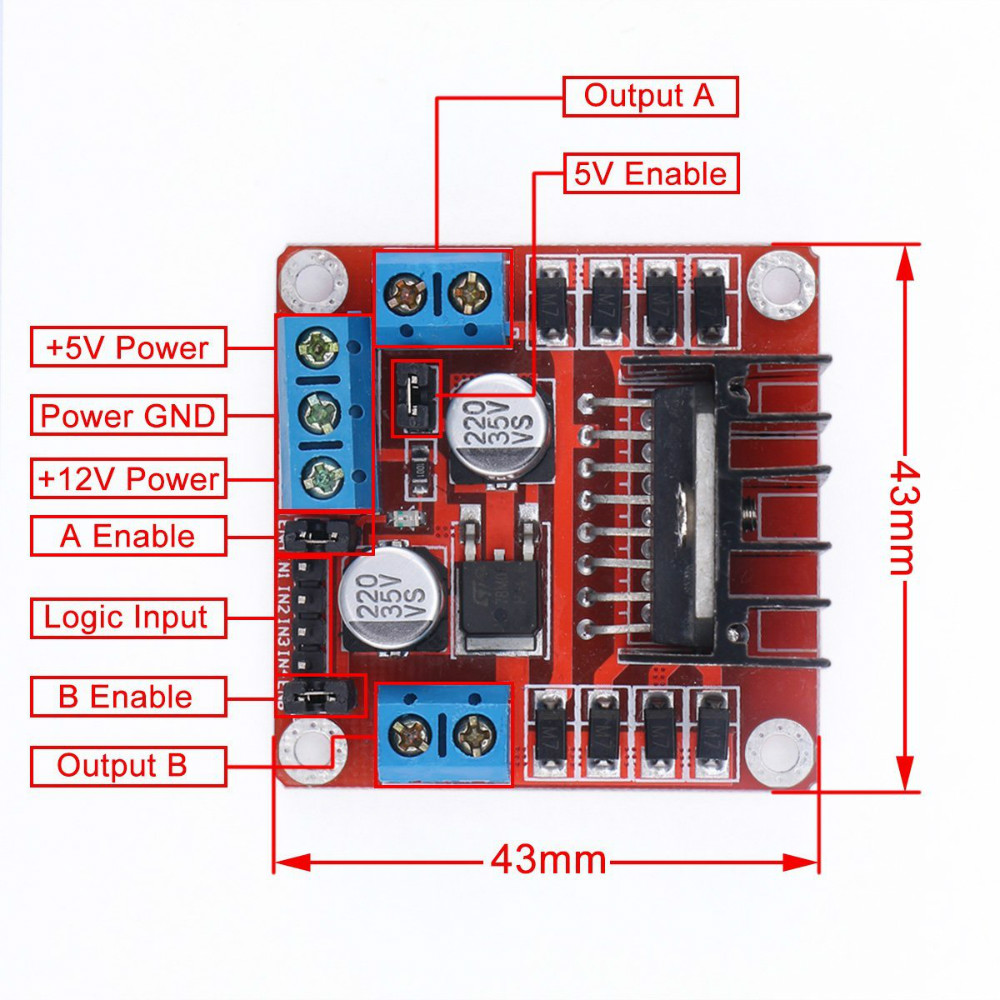
Pinout
- DC motor 1 “+” or stepper motor A+
- DC motor 1 “-” or stepper motor A-
- 12V jumper – remove this if using a supply voltage greater than 12V DC. When the jumper is in place, the onboard voltage regulator is active (12V max to 5V).
- Connect your motor supply voltage here, maximum of 35V DC. Remove 12V jumper if >12V DC
- GND
- 5V output if the 12V jumper at #3 is in place. This is ideal for powering your Arduino.
- DC motor 1 enable jumper. Leave this in place when using a stepper motor. Connect to PWM output for DC motor speed control.
- IN1
- IN2
- IN3
- IN4
- DC motor 2 enable jumper. Leave this in place when using a stepper motor. Connect to PWM output for DC motor speed control.
- DC motor 2 “+” or stepper motor B+
- DC motor 2 “-” or stepper motor B-
Connect the L298N stepper driver board to a 9V…12V power supply using pin #4 (+12V) and #5 (GND). Leave the jumper in #3 in place. You can now use the +5V pin at #6 (and the GND pin at #5) to power your Arduino. If you remove the jumper, the onboard voltage regulator is disabled and the +5V pin at #6 is no longer active.
самодельный станок с ЧПУ, отзывы duxe.ru
Меню навигации
- Форум
- Участники
- Правила
- Поиск
- Регистрация
- Войти
Пользовательские ссылки
- Активные темы
Объявление

Информация о пользователе
горять L298 почему?
Сообщений 1 страница 10 из 10
Поделиться12008-05-30 10:15:15
- Автор: mr_Coder
- малоразговорчивый
-


- Откуда: Нижневартовск
- Зарегистрирован : 2008-02-29
- Приглашений: 0
- Сообщений: 77
- Уважение: [+1/-0]
- Позитив: [+2/-1]
- Пол: Мужской
- Возраст: 35 [1986-04-27]
- Провел на форуме:
1 день 13 часов - Последний визит:
2010-11-12 21:59:28
у меня L298 загорелась 
Поделиться22008-05-30 12:51:30
- Автор: Трудоголик
- Заблокирован
-

- Откуда: Тундра
- Зарегистрирован : 2007-11-03
- Приглашений: 0
- Сообщений: 1348
- Уважение: [+60/-1]
- Позитив: [+9/-1]
- Пол: Мужской
- Возраст: 63 [1958-01-19]
- Провел на форуме:
1 день 10 часов - Последний визит:
2010-01-26 22:19:32
Когда потушишь, и прежде чем ставить новую, почитай внимательно форум, про расчет тока в обмотке, про то чем и как измерять ток.
Поделиться32008-05-30 19:29:11
- Автор: mr_Coder
- малоразговорчивый
-
- Откуда: Нижневартовск
- Зарегистрирован : 2008-02-29
- Приглашений: 0
- Сообщений: 77
- Уважение: [+1/-0]
- Позитив: [+2/-1]
- Пол: Мужской
- Возраст: 35 [1986-04-27]
- Провел на форуме:
1 день 13 часов - Последний визит:
2010-11-12 21:59:28
Когда потушишь, и прежде чем ставить новую, почитай внимательно форум, про расчет тока в обмотке, про то чем и как измерять ток.
Когда дёргался туда-сюда — всё нормально было. я ток отрегулировал. микруха немного грелась. Потом переподключил моторчик, включил в розетку и ПШИК 
А есть эквивалентная схема на биполярных транзисторах, чтобы с L297 такой же степ-дир получился?
Поделиться42008-06-02 08:22:32
- Автор: mr_Coder
- малоразговорчивый
-
- Откуда: Нижневартовск
- Зарегистрирован : 2008-02-29
- Приглашений: 0
- Сообщений: 77
- Уважение: [+1/-0]
- Позитив: [+2/-1]
- Пол: Мужской
- Возраст: 35 [1986-04-27]
- Провел на форуме:
1 день 13 часов - Последний визит:
2010-11-12 21:59:28
Бляха муха.. уже вторая микруха взорвалась 
Чё я делаю не так.
Поделиться52008-06-02 19:51:04
- Автор: Master-VRI
- Администратор
-

- Откуда: Рыбинск
- Зарегистрирован : 2007-11-03
- Приглашений: 0
- Сообщений: 496
- Уважение: [+23/-0]
- Позитив: [+8/-10]
- Пол: Мужской
- Возраст: 46 [1975-04-11]
- Провел на форуме:
7 дней 0 часов - Последний визит:
2017-02-08 08:20:20
у меня тоже 2шт сгорело. причину нашел: для форсирования движков использовал лампочки + повышенное напряжение.
в статике ток 1.5А (у 298 = 2А мах). т.е. допустимо. как начал гонять то вначале одна сгорела, затем другая.
Причина: лампы в холодном сотоянии имеют ничтожно малое сопротивление, соответственно течет бешенный ток. т.к. в движени (вращение движка) на лампу идет «переменка» она не успевает прогреватся а следовательно . см выше.
Поделиться62008-06-02 21:48:34
- Автор: mr_Coder
- малоразговорчивый
-
- Откуда: Нижневартовск
- Зарегистрирован : 2008-02-29
- Приглашений: 0
- Сообщений: 77
- Уважение: [+1/-0]
- Позитив: [+2/-1]
- Пол: Мужской
- Возраст: 35 [1986-04-27]
- Провел на форуме:
1 день 13 часов - Последний визит:
2010-11-12 21:59:28
Мда. хреново. Я эти микросхемы с чип-дипа 2,5 месяца ждал, а они взрываются как фейерверк
Буду плату переделывать под UC3842 + 4 КТ972А. А что делать?! Ещё 2,5 месяца ждать.
Поделиться72008-06-04 12:54:00
- Автор: Gena_cross
- заглянул
-

- Откуда: Ангарск
- Зарегистрирован : 2008-05-27
- Приглашений: 0
- Сообщений: 4
- Уважение: [+0/-0]
- Позитив: [+0/-0]
- Пол: Мужской
- Возраст: 56 [1965-01-29]
- Провел на форуме:
5 часов 3 минуты - Последний визит:
2008-11-22 23:58:18
А я решил собрать на SI-7300A (Стоят в Canon-1215) с микрухой К555ТМ7 . Микосхемы пока не греются. Блок питания взял от Star1500. Погоняем увидим. Где вот взять для теста движка
прогу не Демо пока не знаю.
Поделиться82008-06-04 13:41:28
- Автор: skryga
- малоразговорчивый
-

- Откуда: Львов
- Зарегистрирован : 2008-01-31
- Приглашений: 0
- Сообщений: 67
- Уважение: [+1/-0]
- Позитив: [+3/-1]
- Пол: Мужской
- Возраст: 38 [1983-09-09]
- Провел на форуме:
3 дня 4 часа - Последний визит:
2009-01-28 10:47:08
Gena_cross
Где вот взять для теста движка прогу не Демо пока не знаю.
Вариант толькоо один — купить у Романа.
Поделиться92008-06-04 14:04:41
- Автор: ChaiSER
- молчун
- Откуда: Ukraine
- Зарегистрирован : 2008-02-08
- Приглашений: 0
- Сообщений: 31
- Уважение: [+2/-0]
- Позитив: [+0/-0]
- Пол: Мужской
- Возраст: 48 [1973-09-07]
- Провел на форуме:
11 дней 11 часов - Последний визит:
2010-03-13 10:23:17
2 Gena_cross
Для теста можно попробовать программу Dj_smart‘а, см. «Программа для отладки контроллеров с ШИМ».
Поделиться102008-06-04 23:03:50
- Автор: Master-VRI
- Администратор
-
- Откуда: Рыбинск
- Зарегистрирован : 2007-11-03
- Приглашений: 0
- Сообщений: 496
- Уважение: [+23/-0]
- Позитив: [+8/-10]
- Пол: Мужской
- Возраст: 46 [1975-04-11]
- Провел на форуме:
7 дней 0 часов - Последний визит:
2017-02-08 08:20:20
Gena_cross пердупреждение. пишешь не в тему. есл нет такой темы создай свою.
я наконец то отмучал контроллер на тм5 + L298. напомню: при первых пусках выгорело 2 шт 298. последствия осознал не сразу: сдохла ондна тм5.
вчера все перпаял. заменил 298. один канал глючит. одна обмотка не работает. признаки: без движков на выходе все ок. как только цепляешь движок или любой резюк на выход то идет просадка до нуля. т.е. на выходе пропадает напруга. перепробовал все. ну думаю купил битую 298. перепаял. не помогло. искал пол дня. нашел оказалось был дохлый резистор на 5 ом — сдох когда горели 298.
вот так. мож кому полезно будет.
еще раз предупреждаю будте осторожней при использовании ламп для форсажа движков. я сейчас поставил мощные резисторы.