Двигатели с переменным холостым ходом
Выбор шагового двигателя
Содержание
[править] ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ О РЕЖИМАХ РАБОТЫ ШАГОВОГО ДВИГАТЕЛЯ
[править] Модель работы идеального шагового двигателя
Шаговый двигатель — устройство с постоянной мощностью, если мощность определить как момент, умноженный на скорость. Это означает, что крутящий момент обратно пропорционален скорости. Чтобы уяснить, почему мощность мотора не зависит от скорости, представим себе идеальный шаговый двигатель.
В идеальном двигателе нет трения, его момент пропорционален амперо-виткам обмоток и единственной электрической характеристикой является индуктивность. Индуктивность L характеризует способность обмотки запасать энергию в магнитном поле. Индуктивности обладают свойством индуктивного сопортивления, т.е. сопротивления переменному току, которое тем больше, чем быстрее меняется ток, а значит, индуктивное сопротивление возрастает вместе со скоростью вращения двигателя. По закону Ома ток прямо пропорционален напряжению и обратно пропорционален полному сопротивлению, откуда следует, что ток обмотки уменьшается при увеличении скорости вращения. Т.к. момент пропорционален амперо-виткам, а ток обратно пропорционален скорости, то момент также будет обратно пропорционален скорости. Т.е. при нулевой скорости момент стремится к бесконечности, при увеличении скорости момент(и ток) начинает стремиться к нулю.
Электрически, реальный двигатель отличается от идеального в основном ненулевым сопротивлением обмотки, а также ферромагнитными составляющими, которым свойствоенно насыщаться магнитным полем, что приводит к гистерезисным потерям и потерям на вихревые токи. Насыщение ограничивает момент, а вихревые токи и гистерезисные потери вызывают нагрев мотора. Рассмотрим кривую зависимости крутящего момента шагового двигателя от скорости.

Как видно из графика, при скорости ниже определенного предела, момент, а следовательно и ток, возрастают очень быстро, вплоть до уровней, приводящих к повреждению мотора. Чтобы этого избежать, драйвер должен ограничивать нарастание тока до определенной величины. Поскольку момент пропорционален току, момент будет постоянен начиная с момента удержания до порогового значения скорости, а при скорости выше порога — ток будет ограничен индуктивностью обмоток.

В результате, скорость-моментная характеристика идеального двигателя будет начинаться с отрезка, где момент постоянный, до точки, когда мотор перестанет генерировать и потреблять реактивную мощность. Реальный шаговый двигатель обладает потерями, которые изменяют идеальную скорость-моментную характеристику. Особенно велик вклад момента от зубцовых гармоник магнитного поля(его иногда указывают в документации на двигатель). Потери в двигателе есть всегда, и чем быстрее вращается вал шагового мотора, тем больше потери, и их также необходимо вычитать из идеальной характеристики.

Обратите внимание, как реальная мощность падает вместе с ростом скорости, в том числе и на отрезке «постоянной мощности». Скругление на переходной точке обусловлено переходным процессом в цепи — драйвер постепенно превращается из источника тока в источник напряжения.
[править] Резонанс на средних частотах
Шаговый двигатель сильно подвержен резонансу, являясь по факту аналогом маятника «подвешенный на пружине груз», где грузом является ротор, а пружиной — магнитное поле, и имеет частоту собственных колебаний, зависящую от силы тока и инерции ротора. В момент, когда разность фаз момента и скорости достигает величины 180 град., возникает резонанс – изменение магнитного поля начинает совпадать со скоростью, и скорость ротора при позиционировании на новый шаг становится слишком велика. При резонансе значительная часть энергии магнитного поля уходит на преодоление инерции ротора при колебании около положения равновесия, что выражается в значительном падении крутящего момента на валу. Накопленная кинетическая энергия ротора расходуется при возникновении резонанса примерно за 1-10 сек, поэтому разогнать двигатель можно, пройдя зону резонанса без последствий, но работать сколь-нибудь продолжительное время не удастся – вал остановится. Для устранения этого явления в драйверах используются различные антирезонансные алгоритмы.

[править] Мощность двигателя
Выходная мощность двигателя (скорость?момент) пропорциональна напряжению, деленному на квадратный корень из индуктивности. Если мы увеличим вдвое напряжение ШИМ, то получим другую кривую СМХ, лежащую выше, и мощность на участке постоянной мощности вырастет вдвое. С током иная картина. Рисунок ниже показывает, что будет при выставлении на драйвере тока в 2 раза больше номинального для двигателя. Мотор начинает выделять в 4 раза больше тепла, а момент на низких оборотах увеличивается менее чем в 2 раза из-за насыщения сердечников обмоток.

Как можно видеть, мощность не увеличивается вовсе. Всегда рекомендуется выставлять ток на драйвере равным номинальному значению для двигателя. Это в том числе снизит вибрации на низких частотах, улучшит характеристики хода в микрошаговом режиме.
[править] Напряжение питания и нагрев двигателя
Основные причины нагрева двигателя: потери на сопротивлении обмоток и ферромагнитные потери. Первая часть всем знакома – это тепловая энергия, выделяющяяся на активном сопротивлении проводов обмоток, равная I2R. Вклад этого слагаемого велик только когда двигатель находится в режиме удержания, и резко уменьшается с возрастанием скорости двигателя. Ферромагнитными потерями назваются потери на токи Фуко и гистерезисные потери. Они зависят от изменения тока и, следовательно, от питающего напряжения, и выделяются в виде тепла. Как было сказано выше, мощность двигателя растет прямо пропорционально напряжению, однако ферромагнитные потери тоже растут, причем, в отличие от мощности, — нелинейно, что и ограничивает максимальное напряжения, которое можно использовать для драйвера. Можно сказать, что максимальная полезная мощность шагового двигателя определяется количеством тепла, которое может на нем безопасно выделяться. Поэтому не следует стараться выжать полкиловатта из двигателя 57 серии, подключив драйвер к источнику в 10 кВ – у напряжения есть разумные пределы. Их можно рассчитывать разными способами. Эмпирически было получено несколько оценок сверху для максимального питающего напряжения ШИМ-драйвера: оно не должно превышать номинальное напряжение обмоток более чем в 25 раз или величину 32v L, где L – индуктивность обмотки.
Для наглядности ниже показан график, показывающий ферромагнитные потери для двигателя с номинальными характеристиками 4 А, 3 В.

[править] Кратко о мощности шагового двигателя
Выбор двигателя и питающего напряжения целиком зависят от задач. В идеале, двигатель должен выдавать достаточный момент на максимальной планируемой скорости. Необходимо отличать момент от мощности двигателя: большой момент на низких скоростях не означает, что двигатель мощный. Выходная мощность – другой, более важный параметр, её примерно можно оценить по кривой скорости-момента. Теоретически, максимальная мощность, которую можно стабильно получать с драйвера, питаемого напряжением 80 В и выходным током 7 А примерно 250 Ватт(1/3 л.с.), в реальности же для этого потребуется 2 или 3 двигателя NEMA 34. Двигатели NEMA 23 слишком малы для отвода тепла, а NEMA 42 из-за размера не подходят по импедансу: если их номинальный ток меньше, чем 7 А, то напряжение будет больше 80 В, и наоборот. Момент от зубцовых гармоник в моторах NEMA 42 существенно больше, чем в малых моторах, и обязательно должен быть учтен при расчете выходной мощности. Другими словами, выходная мощность двигателей NEMA 42 падает быстрее, чем у меньших двигателей. NEMA 42 следует использовать, если требуется получить высокий момент на низких скоростях и нет смысла использовать мотор-редуктор.
[править] О ЧЕМ ГОВОРЯТ ХАРАКТЕРИСТИКИ ШАГОВОГО ДВИГАТЕЛЯ
Если вы опустили все, написанное выше, или прочитали, но мало что поняли, данная глава поможет разобраться, как перейти к практической части. Несколько слов о размере двигателя. Развитие производства шаговых двигателей достигло больших успехов, и теперь шаговые двигатели одного размера разных производителей обладают очень схожими характеристиками. Именно размер двигателя задает рамки, в которых может изменяться его главная характеристика — кривая скорости-момента. Индуктивность обмотки показывает, насколько крута будет кривая СМХ при одинаковом напряжении питания драйвера с ШИМ: если мы возьмем 2 двигателя индентичного размера с разной индуктивностью, и будем управлять ими одним драйвером с одним и тем же питающим напряжением, полученные кривые СМХ будут отличаться крутизной.
Большая индуктивность потенциально дает вам возможность получить больший крутящий момент, но чтобы произвести такую конверсию, потребуется драйвер с большим напряжением питания — тогда кривая СМХ поднимется вверх пропорционально увеличению напряжения. На практике почти все фирмы производят моторы одного размера в двух исполнениях — «медленный» и «быстрый», с большой и малой индуктивностью. Причем «быстрые» модели пользуются большей популярностью — для них на высоких оборотах требуется меньшее напряжение, а значит более дешевые драйверы и источник питания. А если вдруг не хватает мощности — можно взять двигатель побольше. «Медленные» модели остаются для специфических применений — в случаях, когда от шагового привода не требуется больших скоростей, нужен большой момент удержания и т.п. Ток обмотки косвенно связан с крутящим моментом, но в основном он говорит о том, какой драйвер нужно будет подобрать к этому двигателю — он должен быть способен выдавать именно такой уровень тока. Напряжения питания обмотки показывает, какое постоянное(не ШИМ) напряжение можно подавать на обмотку — таково значение напряжения, используемое драйверами постоянного напряжения. Оно пригодится при вычислении максимально допустимого напряжения питания драйвера с ШИМ, и тоже косвенно связано с максимальным крутящим моментом.
[править] АЛГОРИТМ ПОДБОРА ШАГОВОГО ДВИГАТЕЛЯ
Так как же выбрать двигатель? Зависит от того, какими вы данными обладаете. По большому счету, выбор двигателя сводится к выбору 4 вещей — производителя, вида двигателя, размера и индуктивности. Первый параметр поддается оценке с трудом — мало у кого репрезентативная выборка образцов от разных поставщиков. Что касается вида двигателя, мы рекомендуем всегда, когда есть неопределенность в выборе, использовать биполярные шаговые двигатели с 4 выводами и малой индуктивностью. Т.е. выбор в основном заключается в выборе размера двигателя(в пределах одного размера характеристики двигателей с одной индуктивностью почти всех производителей практически совпадают). Для выбора конкретной модели можно использовать следующий алгоритм:
- Рассчитайте максимальную скорость вращения V в об/сек, которую хотите получить от привода, и момент M, который необходимо получить от него на этой скорости(закладывайте в это значение запас в 25-40%).
- Переведите скорость вращения в частоту полных шагов PPS, для стандартного двигателя с шагом 1.8 град PPS = 200 * V.
- Выберите примерно подходящий на первый взгляд размер двигателя, из числа доступных моделей этого размера выберите двигатель с не самой большой индуктивностью.
- Воспользуйтесь кривой СМХ, приводимой производителем, найдите на ней ваше значение PPS. Сверьтесь, достаточен ли момент, указанный на кривой.
- Если момент, указанный на кривой слишком мал, рассмотрите двигатель размером побольше, если слишком велик — размером поменьше.
Однако, часто этот способ дает неверные результаты по причине большого количества факторов и допущений при расчете момента. Запросто можно получить, что для управления небольшим портальным фрезером с порталом весом 15 кг вдруг потребуются двигатели ST86-114. Чаще используют эмпирические способы, и они оказываются точнее. Один из таких способов — определение двигателей по весу портала и размеру рабочего поля. Например, выбор шагового мотора для горизонтальной передачи(оси X и Y) можно осуществить исходя из веса подвижной части, передачи, направляющих и материалов, планируемых к обработке. Для портальных станков классической компоновки, с передачей ШВП, шагом 5 мм на оборот, для обработки дерева и пластика, скорость холостого хода до 4000 мм/мин, в предположении, что направляющие оси без преднатяга и отъюстированы так, что подвижная часть ходит по ним без какого-либо сопротивления, можно порекомендовать следующие значения:
- Вес подвижной части менее 5 кг — двигатель серии PL42 или аналогичный.
- Вес подвижной части 5-10 кг — двигатель PL57-56 или аналогичный.
- Вес подвижной части 10-23 кг — двигатель PL57-76 или аналогичный.
- Вес подвижной части 23-35 кг — двигатель PL86-80 или аналогичный.
- Вес подвижной части 35-50 кг — двигатель PL86-114 или аналогичный.
Совместно с этими оценками можно использовать оценки для размеров рабочего поля: Рабочее поле 0,1-0,5 кв.м. — двигатели PL57-76 или аналогичные. Рабочее поле 0,5-1 кв.м. — двигатели PL86-80 или аналогичные. Рабочее поле 1-1,5 кв.м. — двигатели PL86-114 или аналогичные. Если характеристики Вашего станка находятся в пограничных интервалах, скажем, вес портала 23 кг, поле около 0,5 кв. м., стоит использовать дополнительные оценочные методы. Еще один распространенный подход заключается в анализе готовых станков на рынке, которые близки к конструируемому по размерам и характеристикам — проверенная конструкция означает, что двигатели уже подобраны оптимальным образом, и можно взять их характеристики за основу.
И последнее, что можно порекомендовать — обратиться за консультацией к опытным специалистам.
Большая Энциклопедия Нефти и Газа
Система — холостой ход
Система холостого хода предназначена для приготовления горючей смеси, обеспечивающей пуск двигателя и его устойчивую работу на малых оборотах холостого хода. Эта система состоит из жиклера холостого хода, топливного и эмульсионного каналов ( один из них соединяет жиклер холостого хода с колодцем главной дозирующей системы, а другой — со смесительной камерой), воздушного канала, двух калиброванных отверстий в смесительной камере и регулировочного винта качества горючей смеси. [1]
Система холостого хода работает на малых оборотах холостого хода, когда дроссельная заслонка прикрыта, разрежение в смесительной камере незначительно, и главная дозирующая система не работает. [3]
Система холостого хода служит для приготовления горючей смеси на режиме холостого хода, когда главная дозирующая система не работает, так как количество воздуха, проходящего через карбюратор, незначительно и разрежение в диффузоре настолько мало, что топливо через распылитель не поступает. Распылитель системы имеет два отверстия 2 и 4, выполненные в патрубке карбюратора. Когда дроссельная заслонка / прикрыта, отверстие 2 находится ниже заслонки, а отверстие 4 — выше ее кромки, в том месте, где разрежение очень мало. Вследствие этого в каналы 7 и 5 из поплавковой камеры 11 начинает поступать топливо через топливные жиклеры 9 и 8 главной дозирующей системы и холостого хода. [5]
Система холостого хода предназначена для приготовления горючей смеси при малом числе оборотов коленчатого вала двигателя, когда главное дозирующее устройство не работает. [6]
Система холостого хода обеспечивает устойчивую и зкономичную работу двигателя при пониженной частоте вращения без внешней нагрузки. [7]
Система холостого хода состоит из жиклера холостого хода 9, воздушного жиклера холостого хода 10 и канала, который через отверстия 22 соединяется с нижним патрубком. Жиклер 9 сообщается через нижние отверстия распылителя с главным жиклером. [9]
Система холостого хода состоит из топливного 14, воздушного 8 и эмульсионного 16 жиклеров. Винт 17 служит для регулирования состава смеси. [10]
Система холостого хода обеспечивает бесперебойную работу двигателя на холостом ходу. Во время работы двигателя на холостом ходу и с малыми нагрузками дроссельная заслонка почти полностью закрыта, поэтому разрежение и скорость воздушного потока в диффузоре настолько малы, что истечение топлива из распылителя главного жиклера недостаточно для образования смеси нужного состава. В то же время за дроссельной заслонкой создается большое разрежение. В этих условиях приготовление горючей смеси обеспечивается системой холостого хода. [11]
Система холостого хода имеет только регулировку количества горючей смеси. Дозирующая система с переменным сечением диффузора работает на всех режимах. Сечение узкой части диффузора изменяется в пределах 11 5X37 до 32 X 37 мм. Привод к диффузору механический. [12]
Система холостого хода предназначена для приготовления горючей смеси при малой частоте вращения коленчатого вала двигателя. На этих режимах дроссельная заслонка сильно прикрыта и разрежение в диффузоре настолько мало, что из главного дозирующего устройства топливо не поступает. На режимах холостого хода после такта выпуска в цилиндрах остается большое ( относительно количества горючей смеси) количество остаточных газов. Смесь воздуха, бензина и остаточных газов называется рабочей смесью. На холостом ходу рабочая смесь горит медленно, поэтому для устойчивой работы двигателя ее необходимо обогащать топливом. [13]
Система холостого хода ( рис. 7.3, б) имеет топливный 10 и воздушный / / жиклеры. [14]
Двигатели с переменным холостым ходом
В качестве привода маховиков принципиально могут быть использованы различные типы электродвигателей переменного тока. Однако благодаря специфическим требованиям, предъявляемым к системам ориентации и стабилизации, только некоторые типы электродвигателей переменного тока находят практическое применение в исполнительных устройствах с электродвигателями-маховиками. Рассмотрим особенности различных электродвигателей переменного тока с целью оценки возможности их использования в исполнительных устройствах систем ориентации и стабилизации.
Трехфазный асинхронный электродвигатель с короткозамкнутым ротором обладает существенно нелинейными регулировочными характеристиками. Для плавного регулирования скорости этого электродвигателя необходимо плавно менять частоту питающей сети. При этом для того, чтобы электродвигатель работал с постоянным потоком, напряжение должно также меняться пропорционально частоте. Это требует отдельного источника энергии с регулируемой частотой и
напряжением. Кроме того, регулирование скорости трехфазного асинхронного электродвигателя в диапазоне малых скоростей сопровождается чрезмерным перегревом.
Синхронный электродвигатель теоретически является идеальным приводом для маховиков, так как угловая скорость вращения его вала не зависит от нагрузки и точно определяется числом пар его полюсов и частотой питающей сети. Управление синхронным электродвигателем может осуществляться изменением частоты и амплитуды приложенного напряжения. В этом случае также требуется наличие источника энергии с регулируемой частотой и напряжением. Синхронный электродвигатель, как и асинхронный с короткозамкнутым ротором, не пригоден для управления малыми угловыми скоростями, особенно скоростями, близкими к нулю. Хорошее регулирование скорости вращения синхронного электродвигателя возможно только при уменьшении ее не белее чем на 30% от максимальной. Дальнейшее уменьшение скорости вращения приводит к интенсивному нагреванию якоря. По этим причинам применение синхронного электродвигателя в качестве привода маховиков ограничено.
Управление асинхронными и синхронными электродвигателями, кроме частотного способа, при котором входной сигнал формирует амплитуду и частоту напряжения статорных обмоток, определяющих скорость вращения электродвигателя, может осуществляться частотно-токовым способом (см. гл. IV настоящей книги), при котором входной сигнал определяет величину тока в статорных обмотках, т. е. момент на валу электродвигателя. В этом случае в приводе с асинхронным электродвигателем частота вращения ротора вместе с частотой, зависящей от входного сигнала, определяет выходную частоту токов статора. В приводе с синхронным электродвигателем частота вращения ротора независимо от входного сигнала определяет частоту синусоидальных токов, вырабатываемых силовой частью привода для питания статорных обмоток.
Привод с частотно-токовым управлением имеет идеально «мягкую» механическую характеристику (момент не зависит от угловой скорости вала и определяется входным сигналом). Это обстоятельство не имеет принципиального значения, так как электродвигатель-маховик используется в замкнутой системе регулирования. В скоростной системе регулирования с асинхронным электродвигателем, электронной схемой управления и полупроводниковым усилителем при частотно-токовом управлении можно обеспечить жесткость механической характеристики не хуже 0,35%, а с синхронным электродвигателем с электронной схемой управления и полупроводниковым усилителем — не хуже 
Применение частотно-токового управления асинхронными и синхронными электродвигателями переменного тока представляет определенный практический интерес, так как позволяет получить новые качества этих электродвигателей, такие как плавный пуск, торможение, большая перегрузочная способность. Однако в настоящее время на пути широкого внедрения электродвигателей с частотно-токовым управлением имеется немало трудностей.
Наиболее подходящим среди электродвигателей переменного тока для применения в качестве привода маховиков является двухфазный асинхронный электродвигатель. Регулирование угловой скорости вращения такого электродвигателя осуществляется изменением аплитуды напряжения в обмотке управления, что позволяет плавно изменять скорость вращения от нуля до максимальной. К основным достоинствам двухфазного асинхронного электродвигателя следует отнести: отсутствие щеток и коллектора, простоту усиления управляющего сигнала усилителем переменного тока, а также возможность обеспечения постоянства электромагнитного момента в широком диапазоне изменения угловой скорости вращения. Он имеет приемлемую линейность моментной характеристики и к. п. д. при максимальной выходной мощности примерно 30%.
Одним из недостатков этого типа электродвигателей является значительная мощность холостого хода, так как обмотка возбуждения электродвигателя питается непрерывно. Мощность холостого хода можно уменьшить путем соответствующего перераспределения мощностей обмоток управления и возбуждения [10].
В настоящее время в качестве привода маховиков в основном применяются двухфазные асинхронные электродвигатели переменного тока. Весьма перспективной для применения в качестве электродви-гателя-маховика считается инерциальная сфера (шаровой маховик), позволяющая управлять аппаратом одновременно относительно трех осей.
Принцип работы двигателя постоянного тока, характеристики электродвигателя, как устроен, основные отличия
Большая часть современных электрических приводов работает использует переменный ток и работает в асинхронном режиме. Хотя, нельзя сказать, что моторы постоянного тока востребованы меньше. Чтобы понять, чем отличается один от другого электродвигатель, как устроен каждый из них, нужно вспомнить, что входит в понятие «ток».
Отличие тока переменного от постоянного
Прежде всего, вспомним, что включает понятие «электрический ток» и какие его виды существуют. Это сделать легко, потому что все учились в школе и еще помнят о том, что преподавали на уроке физика. Понимают под ним направленное движение ионов или электронов, то есть, заряженных частиц.
Направление и величина тока за определенный промежуток времени определяют, будет ли ток считаться переменным или постоянным, что наглядно отражает график, приведенный ниже:
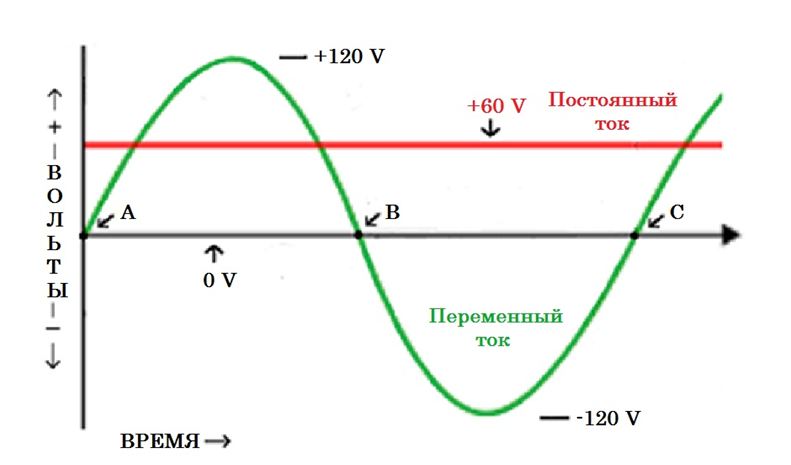
Постоянным будет ток, который со временем не изменяет своего значения. Напряжение всегда стабильно. Это красная линия.
Зеленая линия, имеющая форму синусоиды, это ток переменный, который меняет как свое направление, так и величину. Периодичность прохождения одинаковых точек на горизонтальной оси ординат называют его частотой. Она для переменного тока считается стандартной и равняется 50 Гц.
В действительности, все инструменты и бытовые приборы (или, почти все) работают от постоянного тока, преобразованного из переменного (имеющегося в сети). Зачем же тогда нужен ток синусоидальный?
Вопрос вполне закономерный и объяснение ему следующее: подобная форма разрешает очень просто преобразовать поступающее от генератора электрической станции напряжение. Иными словами, от станции, напряжение которой 200000-300000 Вольт, до значения 220, привычного нам.
Принцип функционирования электрического двигателя
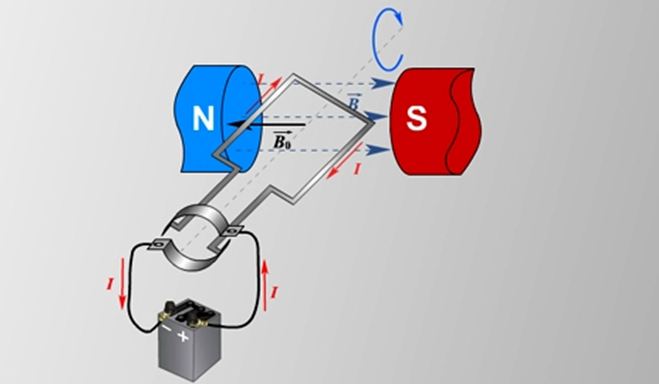
Работа электрического двигателя постоянного тока базируется на взаимодействии двух магнитных полей, создаваемых ротором и статором. Вновь вспоминаем школьные уроки физики и рамку, которая вращается в магнитном однородном поле, Подавая на нее ток, индуцируем собственное поле магнитное круговое, которое взаимодействует с первым, создавая силу Ампера, которая направлена перпендикулярно и выталкивает из этого однородного поля нашу рамку.
В двигателе наблюдается тоже: статор играет роль неподвижного однородного магнитного поля, а в качестве рамки выступает вращающийся ротор двигателя, называемый также якорем.

Это поле создается полюсами статора. На полюсах ротора имеются обмотки, состоящие из 2 частей и соединенные последовательно между собой. Их концы прикреплены к коллекторным пластинам, находящимся на валу двигателя электрического. Они, в свою очередь, контактируют с графитовыми щетками.
При условии, что расположены полюса, аналогично представленным на рисунке приведенном выше, полюс якоря будет северным. Также северным будет полюс статора, находящийся с ним в непосредственной близости.
Рекомендуем:
Поскольку, равнозарядные полюса отталкиваются под воздействием магнитных сил (с электродвигателем возможно это за счет вращения), северный якорный полюс развернется на 180 градусов и займет положение напротив статорного южного. По логике, оба они должны притягиваться, вызывая торможение.
Чтобы избежать этого и добиться вновь «отталкивания» полюсов, якорные обмотки в момент перехода через нейтральную линию переключают при помощи коллектора. Устройство двигателя постоянного тока, на основании этой информации, изображается следующим образом:
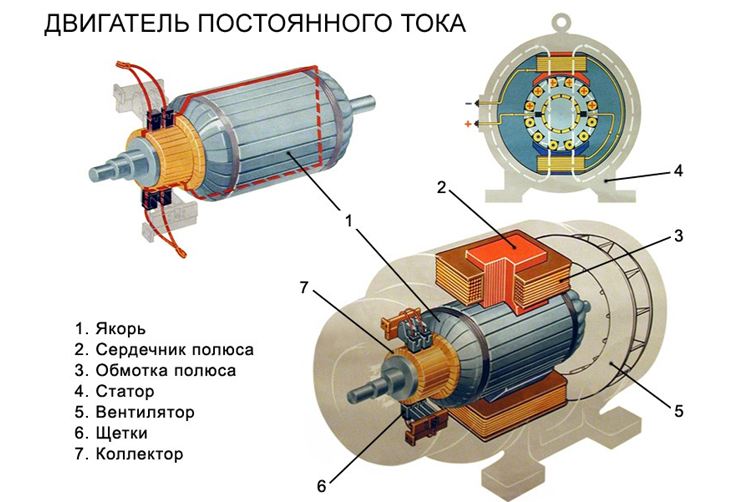
Характеристики для двигателя электрического, работающего на постоянном токе
Электрический двигатель является оборудованием, управляют которым в зависимости от конкретных условий.
Для регулировки существует три метода:
- изменение напряжения, подаваемого на обмотки;
- введение в имеющуюся цепь сопротивления (дополнительного);
- варьирование величиной потока, т.е. возбуждением.
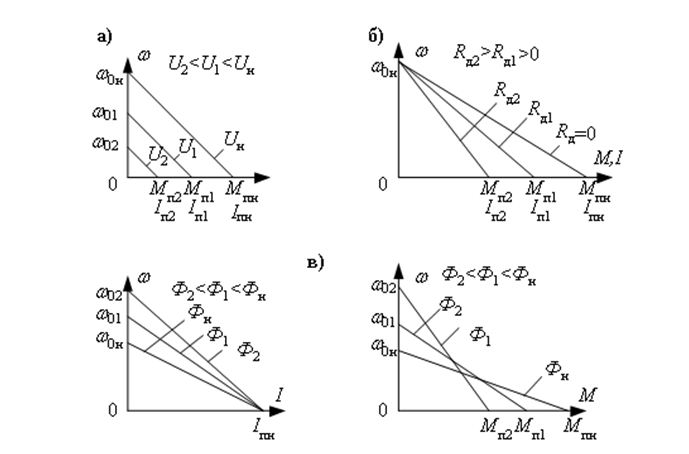
Оценить работу электродвигателя помогают графики характеристик, подразделяемые на:
- механические, демонстрирующие зависимость частоты или скорости вращения от имеющегося на валу мотора момента (с учетом поправочного коэффициента);
- регулировочные, показывающие как частота вращения зависит от напряжения, подаваемого на якорные обмотки, потока и сопротивления.
В первом случае по оси ординат откладывают частоту вращения, а по оси абсцисс –момент.
Выглядит график как прямая, имеющая отрицательный уклон.
График строят для конкретного напряжения по базовому уравнению:

Скорость, с которой вращается якорь, обозначается буквой ω . Напряжение в якорной цепи – U, коэффициент – K, поток – Ф, сопротивление обмотки якоря активное – RЯ, момент электромагнитный двигателя – M.
При построении графика регулировочной характеристики исходят из величины момента на валу (откладывают по оси х – абсцисс). Частота также откладывается по ординате.
Уравнения для каждой регулировки будет различным:
1. Регулировка напряжения:

2. Регулирование реостатном, т.е. изменяя сопротивление:

3. Потоковое изменение:
С графиками, отображающими сказанное, ознакомиться можно ниже:
О механических характеристиках помнить нужно следующее – они бывают снятыми в реальном режиме, т.е. являющимися естественными, и искусственными, вычисляемые по изменению потока, сопротивления или напряжения.
Режимы работы двигателей
Оценить режимы, в которых работает оборудование, возможно при помощи графиков характеристик, которые необходимо расширить до 4 квадрантов, пронумеровав их. Нумерация начинается с верхнего квадранта правого и продолжается против стрелки часов.
Видео: Двигатель постоянного тока принцип работы (часть 1)
В квадранте первом координаты на обеих осях положительны (+). В нем и третьем можно заметить двигательный режим, определить мощность которого легко по формуле Р = М> 0. В оставшихся втором и третьем квадранте заметен тормозной или генераторный режим, при котором мощность отрицательна.
На графике различить легко точки, а также зоны, соответствующие определенным режимам:
- В точке ω о образуется холостой ход. Момент в ней и ток равняются нулю, т.е. двигателем энергия не получается;
- Подключение генератора параллельное. Реализуется, когда справедливы неравенства ω > ω о и E > U. При этом от рабочего оборудования передается на мотор энергия, в сеть же передается электрическая (генератор тока);
- При коротком замыкании нулю равны E и, но механическая энергия не отдается вращающимся валом. В то же время, электрическая трансформируется в тепловую;
- При соединении последовательном генератора (также режим называют торможением с противовключением) как ЭДС, так и ток направлены одинаково, ω
![]()
![]()
Автор и редактор обзоров по гаджетам и новой техники. Ведет работы по написанию свежих рейтингов к публикациям, проверки достоверности и актуальности информации уже опубликованных статей. Отвечает на вопросы в комментариях, пишет на авто темы.