

Что называется критическим моментом асинхронного двигателя
Вращающий момент асинхронного двигателя
На ротор и полюсы статора действуют электромагнитные вращающие
моменты, одинаковые по величине и направленные в противоположные стороны.
Мощность, необходимая для вращения статорных полюсов с синхронной частотой,
 ,
,
где  — угловая скорость.
— угловая скорость.
Механическая мощность, развиваемая ротором,

где  — угловая скорость ротора.
— угловая скорость ротора.

где РЭ2 — электрические потери в роторной обмотке;
m2 — число фаз обмотки ротора;
R2 — активное сопротивление обмотки ротора;
I2 — ток ротора.

 (7).
(7).
Вращающий момент, с учетом (6),
 .
.
где  , КТ — коэффициент трансформации двигателя с заторможенным ротором.
, КТ — коэффициент трансформации двигателя с заторможенным ротором.
 ,
,
где U1 — напряжение сети.
 (8).
(8).
где  — константа.
— константа.
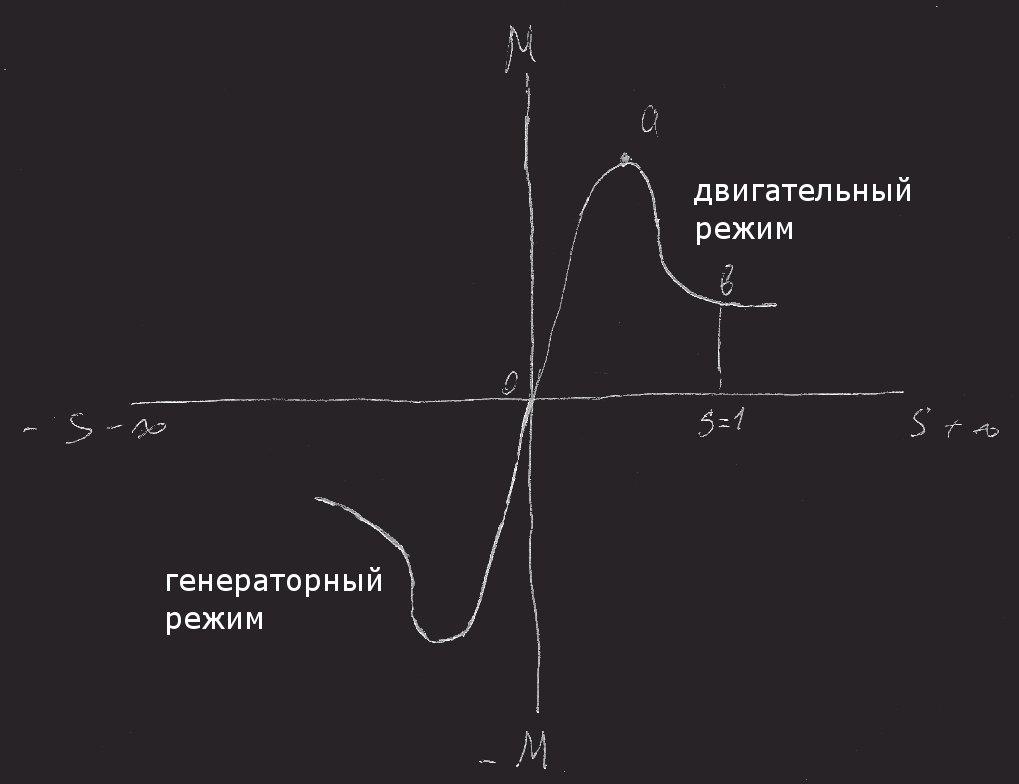
На рис. 5 изображена зависимость электромагнитного момента от скольжения в виде сплошной линии.

Пусть исполнительный механизм, приводимый во вращение данным двигателем, создает противодействующий тормозной момент М2.
На рис.5 имеются две точки, для которых справедливо равенство Мэм = М2 ;
это точки а и в .
В точке а двигатель работает устойчиво. Если двигатель под влиянием какой-либо причины уменьшит частоту вращения, то скольжение его возрастет, вместе с ним возрастет вращающий момент. Благодаря этому частота вращения двигателя повысится, и вновь восстановится равновесие Мэм = М2 ;.
В точке в работа двигателя не может быть устойчива: случайное отклонение частоты вращения приведет либо к остановке двигателя, либо к переходу его в точку а .
Следовательно, вся восходящая ветвь характеристики является областью устойчивой работы двигателя, а вся нисходящая часть — областью неустойчивой работы. Точка б , соответствующая максимальному моменту, разделяет области устойчивой и неустойчивой работы.
Максимальному значению вращающего момента соответствует критическое скольжение Sk . Скольжению S = 1 соответствует пусковой момент. Если величина противодействующего тормозного момента М2 больше пускового МП, двигатель при включении не запустится, останется неподвижным.
Максимальный момент найдем следующим образом. Сначала определим значение критического скольжения, при котором функция Мэм будет максимальной. Для этого первую производную функции по скольжению S от выражения (8) приравняем нулю.

 . (9)
. (9)
Подставив значение критического скольжения в формулу (8), получим
 . (10)
. (10)
Из формул (8), (9), (10) видно:
- величина максимального вращающего момента не зависит от активного сопротивления цепи ротора;
- с увеличением активного сопротивления цепи ротора максимальный вращающий момент, не изменяясь по величине, смещается в область больших скольжений (см. кривая 1 рис. 12,5);
- вращающий момент пропорционален квадрату напряжения сети.
Механической характеристикой называется зависимость скорости асинхронного двигателя от момента на его валу (или от скольжения).
Все электрические машины обратимы,
Обычно номинальное скольжение двигателя, т. е. скольжение, при котором двигатель развивает номинальный момент, составляет малую величину порядка от 0,01 до 0,1. Поэтому зависимость момента двигателя от скольжения при изменении нагрузки от нулевой до номинальной подчиняется линейному закону.
По мере увеличения скольжения влияние индуктивного сопротивления обмотки ротора двигателя значительно возрастает. Это приводит к тому, что зависимость между моментом и скольжением перестает быть линейной и при некотором значении скольжения s = sмакс вращающий момент достигает максимального значения. Скольжение sмакс называется критическим. Исследование условий, при которых наступает максимальный вращающий момент, показывает, что он имеет место приблизительно при таком скольжении, когда индуктивное сопротивление обмотки ротора равно ее активному сопротивлению.
Увеличение скольжения до значений выше критического, т. е. дальнейшее понижение частоты вращения ротора, приводит к понижению величины вращающего момента.
Наконец, при скольжении, равном единице, т. е. при неподвижном роторе момент асинхронного двигателя равен пусковому моменту.
Как видно из механической характеристики, она имеет два экстремума: первый в области положительных скольжений, второй в области отрицательных скольжений.
Величина критического скольжения одинаковая и в двигательном и в генераторном режимах, только имеет разные знаки.
На участке s
Автономные асинхронные генераторы — трёхфазные машины, преобразующие механическую энергию первичного двигателя в электрическую энергию переменного тока. Их несомненным достоинством перед другими видами генераторов являются отсутствие коллекторно-щеточного механизма и, как следствие этого, большая долговечность и надежность. Если отключенный от сети асинхронный двигатель привести во вращение от какого-либо первичного двигателя, то в соответствии с принципом обратимости электрических машин при достижении синхронной частоты вращения, на зажимах статорной обмотки под действием остаточного магнитного поля образуется некоторая ЭДС. Если теперь к зажимам статорной обмотки подключить батарею конденсаторовС, то в обмотках статора потечёт опережающий ёмкостный ток, являющийся в данном случае намагничивающим. Ёмкость батареи С должна превышать некоторое критическое значение С0, зависящее от параметров автономного асинхронного генератора: только в этом случае происходит самовозбуждение генератора и на обмотках статора устанавливается трёхфазная симметричная система напряжений. Значение напряжения зависит, в конечном счёте, от характеристики машины и ёмкости конденсаторов. Таким образом, асинхронный короткозамкнутый электродвигатель может быть превращен в асинхронный генератор.

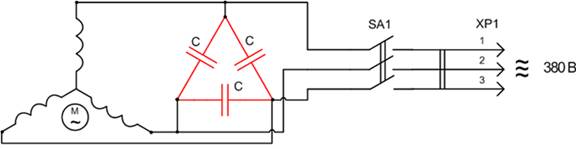
Рис.1 Стандартная схема включения асинхронного электродвигателя в качестве генератора.
Можно подобрать емкость так, чтобы номинальное напряжение и мощность асинхронного генератора равнялись соответственно напряжению и мощности при работе его в качестве электродвигателя.
Индуктивная нагрузка на асинхронный генератор, понижающая коэффициент мощности, вызывает резкое увеличение потребной ёмкости. Для поддержания напряжения постоянным с увеличением нагрузки необходимо увеличивать и ёмкость конденсаторов, то есть подключать дополнительные конденсаторы. Это обстоятельство необходимо рассматривать как недостаток асинхронного генератора.
Частота вращения асинхронного генератора в нормальном режиме должна превышать асинхронную на величину скольжения S = 2…10%, и соответствовать синхронной частоте.
Не выполнение данного условия приведёт к тому, что частота генерируемого напряжения может отличаться от промышленной частоты 50 Гц, что приведёт к неустойчивой работе частото-зависимых потребителей электроэнергии: электронасосов, стиральных машин, устройств с трансформаторным входом. Особенно опасно снижение генерируемой частоты, так как в этом случае понижается индуктивное сопротивление обмоток электродвигателей, трансформаторов, что может стать причиной их повышенного нагрева и преждевременного выхода из строя.
В качестве асинхронного генератора может быть использован обычный асинхронный короткозамкнутый электродвигатель соответствующей мощности без каких-либо переделок. Мощность электродвигателя-генератора определяется мощностью подключаемых устройств. Наиболее энергоёмкими из них являются:
бытовые сварочные трансформаторы;
электропилы, зернодробилки (мощность 0,3…3 кВт);
электроутюги (мощность 850…1000 Вт).
Особо хочу остановиться на эксплуатации бытовых сварочных трансформаторов.
Их подключение к автономному источнику электроэнергии наиболее желательно, т.к. при работе от промышленной сети они создают целый ряд неудобств для других потребителей электроэнергии. Если бытовой сварочный трансформатор рассчитан на работу с электродами диаметром 2…3 мм, то его полная мощность составляет примерно 4…6 кВт, мощность асинхронного генератора для его питания должна быть в пределах 5…7 кВт.
Если бытовой сварочный трансформатор допускает работу с электродами диаметром 4 мм, то в самом тяжелом режиме — «резки» металла, потребляемая им полная мощность может достигать 10…12 кВт, соответственно мощность асинхронного генератора должна находиться в пределах 11…13 кВт.
В качестве трёхфазной батареи конденсаторов хорошо использовать так называемые ком-пенсаторы реактивной мощности, предназначенные для улучшения соs φ в промышленных осветительных сетях. Рассмотренный выше вариант подключения трёхфазного электродвигателя в качестве генератора можно считать классическим, но не единственным. Существуют и другие способы, которые так же хорошо зарекомендовали себя на практике. Например, когда батарея конденсаторов подключается к одной или двум обмоткам электродвигателя-генератора.
В заключение несколько общих советов.
Генератор переменного тока является устройством повышенной опасности. Применяйте напряжение 380 В только в случае крайней необходимости, во всех остальных случаях пользуйтесь напряжением 220 В.
По требованиям техники безопасности электрогенератор необходимо оборудовать заземлением.
Обратите внимание на тепловой режим генератора. Он «не любит» холостого хода. Снизить тепловую нагрузку можно более тщательным подбором емкости возбуждающих конденсаторов.
Не ошибитесь с мощностью электрического тока, вырабатываемого генератором. Если при работе трёхфазного генератора используется одна фаза, то её мощность будет составлять 1/3 общей мощности генератора, если две фазы — 2/3 общей мощности генератора.
§2.4. Основные характеристики трехфазных асинхронных двигателей
Электромагнитный момент.
Полная механическая мощность двигателя
создается в результате вращения ротора с угловой скоростью ω2 под действием момента Мэм т.е.
Эта мощность может быть определена по схеме замещения как электрическая мощность, выделяющаяся на условном сопротивлении нагрузки Rну‘, умноженная на число фаз статора:
На основании (2.19) и (2.20) с учетом (2.8) можно записать
При расчете момента по формуле (2.21) ток I2‘ определяется по схеме замещения (рис. 2.10 ) для соответствующего скольжения.
Формулу (2.21) можно преобразовать, подставив в нее выражение для тока I2‘, получаемое при определенных допущениях из схемы замещения
Коэффициент C, входящий в формулу (2.22), есть модуль комплексного коэффициента С = 1 + (z1 /zm), появляющегося в ходе преобразования. Допущение заключается в учете только модуля коэффициента С, т.к. его аргумент в реальных машинах очень мал. В реальных машинах (исключая микромашины) С = 1,03–1,08 и при качественном анализе иногда принимают С = 1.
Выражение (2.21) можно также преобразовать, выразив активное падение напряжения в роторе I2‘ R2‘ /s через ЭДС на основании формул (2.15) и (2.16)
Подставляя (2.23) в (2.21) и выполняя преобразования с учетом (2.18) и (2.12) получаем
где k — конструктивный коэффициент.
Как видно из (2.24), электромагнитный момент прямо пропорционален основному магнитному потоку Фм и активной составляющей тока ротора I2‘ cos ψ2.
Формулы момента (2.21), (2.22) и (2.24) получены для режима двигателя, но они справедливы и для других режимов с учетом знака и диапазона значений скольжения s. Зависимость электромагнитного момента от скольжения графически представлена на рис. 2.11 (сплошная линия).
Рис. 2.11
Такой вид характеристики легко поясняется с помощью формул (2.24), (2.15) и (2.16). При увеличении скольжения ток ротора I2 непрерывно растет, но становится все более индуктивным – уменьшается cos ψ2 так как увеличивается частота токов в роторе и, соответственно, его индуктивное сопротивление. В результате активная составляющая тока ротора и, соответственно, электромагнитный момент вначале растут, а затем начинают убывать.
Скольжение, при котором момент достигает максимального значения Mмах, называется критическим и обозначается sкр. Для определения sкр необходимо, воспользовавшись выражением (2.22), взять производную dMэм /ds и приравнять ее нулю. Решение получающегося уравнения имеет вид
Принимая в первом приближении С1≈ 1 и R1≈ 0, получим
В большинстве асинхронных двигателей необходимо обеспечить высокий КПД. Поэтому активное сопротивление обмоток, в частности R2, определяющее уровень электрических потерь в роторе, стремятся получить малым. При этом критическое скольжение лежит в диапазоне [0,1..0,25].
Подставляем (2.25) в (2.22) и получаем выражение максимального момента:
Знак «+» относится к двигательному режиму, «-» – к генераторному.
Как видно, максимальный момент пропорционален квадрату напряжения питания, не зависит от активного сопротивления роторной цепи R2 и наступает при тем большем скольжении, чем больше активное сопротивление роторной цепи (рис. 2.11, штрих-пунктирная линия, R2B>R2A).
Пусковой момент двигателя Mп определяется выражением (2.22) при s=1. Значение Mп пропорционально квадрату напряжения питания и возрастает при увеличении R2 (см. рис. 2.11), достигая максимума при sкр =1.
Номинальное скольжение sном, соответствующее номинальному моменту Мном,возрастает с увеличением R2. Это сопровождается ростом электрических потерь в роторной цепи и снижением КПД. У асинхронных двигателей с малым критическим скольжением Sном= 0,02 — 0,06.
Уравнение равновесия моментов на валу двигателя.
Электромагнитный момент, развиваемый двигателем, преодолевает мо-мент нагрузки Мн, прикладываемый к валу двигателя, и собственный момент сопротивления двигателя М (момент холостого хода), определяемый механическими и добавочными потерями в двигателе. Результирующий момент определяет значение и знак ускорения ротора:
где J — момент инерции вращающихся частей – ротора и на-грузки.
Это диффиренциальное уравнение движения электропривода, состоящего из двигателя и нагрузки, преобразованное к виду
называют уравнением равновесия моментов на валу двигателя.
В этом уравнении:
M + Mн= Mст — статический момент сопротивления,
J(dω/dt)= Mдин — динамический момент сопротивления.
Электромагнитный момент Mэм за вычетом момента M называют полезным или вращающим моментом на валу и обозначают M2. Из уравнений (2.28) и (2.29) следует, что:
1) если Mэм = Mст, то dω/dt = 0, ω = const т.е. двигатель работает в установившемся (статическом) режиме, при этом M2 = Mн;
2) если Mэм> Mст, то угловая скорость ротора возрастает, т.е. двигатель работает в переходном ( динамическом ) режиме;
3) если Mэм 0). Если двигатель переходит в тормозной режим, его момент начинает действовать в противоположном направлении (Mэм 0), либо способствовать ему (Mст Mст и угловая скорость продолжает увеличиваться, двигатель уходит от точки А2. Возврата в точку А2 не происходит и при отрицательном приращении скорости (точка А2» ). В этом случае скорость будет продолжать уменьшаться вплоть до остановки двигателя.
Следовательно в точке А1 двигатель работает устойчиво, а в точке А2 – неустойчиво. В общем случае, формальным признаком устойчивой работы двигателя является неравенство
(dMэм /dω2) 0 ) и питающая сеть загружается реактивным током. КПД двигателя η= Р2 /Р1, где Р1 – активная электрическая мощность, потребляемая двигателем. При симметричном питании Р1 = m1U1I1cos φ1, где U1, I1 – фазные напряжение и ток. Зависимость КПД от мощности Р2= Р1 -Δpэ -Δpм -Δpмех имеет такой же вид, как и у трансформатора, т.к. в двигателе потери также подразделяются на постоянные и переменные. Для машин малой и средней мощности максимальное значение КПД η = 0,7 – 0,9, при этом меньшие значения относятся к двигателям меньшей мощности, у которых относительно больше активное сопротивление обмоток.
Номинальный, максимальный и пусковой момент асинхронного двигателя. Формула Клосса
Трехфазный асинхронный двигатель с короткозамкнутым ротором, устройство и принцип действия.
Потери напряжения и мощности в трехфазной линии.
Ток нейтрального провода в трехфазной цепи является суммой фазных токов. При симметричной нагрузке сумма фазных токов равняется нулю. Таким образом, при симметричной нагрузке отсутствуют потери в нейтральном проводе. Потери напряжения и мощности в линии при трехфазном подключении в шесть раз меньше, чем при однофазном подключении потребителей такой же мощности.
При несимметричной нагрузке нейтральный провод необходим, по нему должен проходить выравнивающий ток. При несимметрии фазных токов появляется ток в нейтральном проводе. Если попытаться включить несимметричную нагрузку без нейтрального провода, получится перекос фаз, при котором на нагруженных фазах напряжение понизится, а на разгруженных появляется перенапряжение. Снижение напряжения нарушает работу потребителей, а перенапряжение может вывести из строя.
Потери энергии в нейтральном проводе снижают коэффициент полезного действия линии и ухудшается качество электроснабжения. Поэтому с целью получения симметричной нагрузки однофазные потребители стараются равномерно распределять по фазам.
Асинхронный электродвигатель с короткозамкнутым ротором является самым распространенным из электрических двигателей, применяемых в промышленности. Рассмотрим его устройство. На неподвижной части двигателя – статоре – размещается трехфазная обмотка, питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
Собранный сердечник статора укрепляют в чугунном корпусе двигателя. Вращающуюся часть двигателя – ротор – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам.
Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко. Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал вращается в подшипниках, закрепленных в подшипниковых щитах. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Рассмотрим характеристику, соответствующую режиму двигателя, т.е. при скольжении, изменяющемся от 1 до 0. Обозначим момент, развиваемый двигателем при пуске в ход (S=1) как Mпуск. Скольжение, при котором момент достигает наибольшего значения, называют критическим скольжением Sкр, а наибольшее значение момента – критическим моментом Mкр. Отношение критического момента к номинальному называют перегрузочной способностью двигателя
Критический момент не зависит от активного сопротивления ротора, но зависит от подведенного напряжения. При уменьшении U1 снижается перегрузочная способность асинхронного двигателя.
Для построения механической характеристики задаются значениями коэффициента скольжения s и определяют по нему соответствующее значение частоты вращения ротора n, а также момент М по формуле Клосса
 .
.
Если в эту формулу подставить вместо M и S номинальные значения момента и скольжения (Mн и Sн), то можно получить соотношение для расчета критического скольжения.
 .
.
Участок характеристики, на котором скольжение изменяется от 0 до Sкр, соответствует устойчивой работе двигателя. На этом участке располагается точка номинального режима (Mн, Sн). В пределах изменения скольжения от 0 до Sкр изменение нагрузки на валу двигателя будет приводить к изменению частоты вращения ротора, изменению скольжения и вращающего момента. С увеличением момента нагрузки на валу частота вращения ротора станет меньше, что приведет к увеличению скольжения и электромагнитного (вращающего) момента. Если момент нагрузки превысит критический момент, то двигатель остановится.
Участок характеристики, на котором скольжение изменяется от Sкр до 1, соответствует неустойчивой работе двигателя. Этот участок характеристики двигатель проходит при пуске в ход и при торможении.
Пусковой момент — это значение момента в момент трогания ротора.
Где kм— кратность пускового момента.
Номинальный момент — значение момента, создаваемое электромагнитным полем на валу двигателя при номинальных параметрах двигателя и номинальных внешних условиях.

Под критическим моментом понимают наивысшее или максимально возможное значение. В случае если момент нагрузки превысит величину критического момента, то двигатель остановится.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет

