Шаговый биполярный двигатель схема включение
Драйвер шагового двигателя и двигателя постоянного тока L298N и Arduino
Модуль L298N H-bridge можно использовать для двигателей, напряжение питания которых находится в диапазоне от 5 до 35 вольт.
Кроме того, на многих подобных платах есть встроенный 5В регулятор, который дает возможность запитывать ваши устройства.
Подключение модуля L298N
Прежде чем перейти к управлению двигателем постоянного тока и шаговым двигателем, разберемся с подключением модуля L298N (даташит, техническая информация от производителя).
Ссылки для заказа необходимого оборудования из Китая
- КУПИТЬ цифровой датчик температуры DS18B20;
- КУПИТЬ Arduino Uno R3;

Ниже приведены разъяснения к рисунку.
- Для двигателя постоянного тока 1 “+” или для шагового двигателя A+
- Для двигателя постоянного тока 1 “-” или для шагового двигателя A-
- Коннектор на 12 вольт. Снимите его, если используете напряжение питания больше 12 вольт.
- Питания вашего двигателя обеспечивается с этого выхода. Максимальное напряжение питания постоянным током 35 вольт. Если напряжение больше 12 вольт, разомкните контакты на 3 коннекторе.
- GND — земля.
- Питание 5 вольт, если коннектор на 12 вольт замкнут. Идеально для питания Arduino и т.п.
- Коннектор для двигателя постоянного тока 1. Можно подключить к ШИМ-выходу для управления скоростью двигателя постоянного тока.
- IN1.
- IN2.
- IN3.
- IN4.
- Коннектор для двигателя постоянного тока 2. В случае использования шагового двигателя, подключать сюда ничего не надо. Можно подключить к ШИМ-выходу для управления скоростью двигателя постоянного тока.
- Двигатель постоянного тока 2 “+” или шаговый двигатель B+.
- Двигатель постоянного тока 2 “-” или шаговый двигатель B-.

L298N, Arduino и двигатель постоянного тока
Данный модуль дает возможность управлять одним или двумя двигателями постоянного тока. Для начала, подключите двигатели к пинам A и B на контроллере L298N.
Если вы используете в проекте несколько двигателей, убедитесь, что у них выдержана одинаковая полярность при подключении. Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Поверьте, с точки зрения программирования Arduino это неудобно.
После этого подключите источник питания. Плюс — к четвертому пину на L298N, минус (GND) — к 5 пину. Если ваш источник питания до 12 вольт, коннектор, отмеченный 3 на рисунке выше, можно оставить. При этом будет возможность использовать 5 вольтовый пин 6 с модуля.
Данный пин можно использовать для питания Arduino. При этом не забудьте подключить пин GND с микроконтроллера к 5 пину на L298N для замыкания цепи. Теперь вам понадобится 6 цифровых пинов на Arduino. Причем некоторые пины должны поддерживать ШИМ-модуляцию.
ШИМ-пины обозначены знаком “
” рядом с порядковым номером.
Теперь подключите цифровые пины Arduino к драйверу. В нашем примере два двигателя постоянного тока, так что цифровые пины D9, D8, D7 и D6 будут подключены к пинам IN1, IN2, IN3 и IN4 соответственно. После этого подключите пин D10 к пину 7 на L298N (предварительно убрав коннектор) и D5 к пину 12 (опять таки, убрав коннектор).
Направление вращения ротора двигателя управляется сигналами HIGH или LOW на каждый привод (или канал). Например, для первого мотора, HIGH на IN1 и LOW на IN2 обеспечит вращение в одном направлении, а LOW и HIGH заставит вращаться в противоположную сторону.
При этом двигатели не будут вращаться, пока не будет сигнала HIGH на пине 7 для первого двигателя или на 12 пине для второго. Остановить их вращение можно подачей сигнала LOW на те же указанные выше пины. Для управления скоростью вращения используется ШИМ-сигнал.
Скетч приведенный ниже, отрабатывает в соответствии со схемой подключения, которую мы рассматривали выше. Двигатели постоянного тока и Arduino питаются от внешнего источника питания.
// подключите пины контроллера к цифровым пинам Arduino
Микросхемы драйверов реверсируемых двигателей постоянного тока фирмы ROHM
В статье представлены драйверы реверсируемых двигателей постоянного тока общего назначения производства японской компании ROHM.
Японская компания ROHM представляет на рынке электронных компонентов драйверы реверсируемых двигателей постоянного тока общего назначения на основе технологии широко-масштабной интеграции LSI. Представленные драйверы могут быть трех видов: драйвер управления одним электродвигателем, двумя электродвигателями без стабилизации скорости, а также драйвер управ- ления одним электродвигателем с функцией стабилизации тока. Выбор необходимого драйвера и схемы включения можно сделать, основываясь на данных таблицы 1 и рис. 1–3. В основе всех драйверов реверсируемых двигателей постоянного тока лежит Н-мост на биполярных транзисторах, режим работы которого задается двумя логическими входами (табл. 2). При выборе драйвера необходимо руководствоваться величиной напряжения питания, мощностью электродвигателя, максимальным выходным током, рассеиваемой мощностью, наличием вспомогательной функции «термозащита» и «энергосбережение», возможностью установки выходного напряжения и работы с электронным регулятором скорости.
F — Forward (вперед), R — Reverse (реверсирование), S — Stop (стоп), B — Short brake (тормоз).
 Рис. 1. Драйвер одного электродвигателя постоянного тока
Рис. 1. Драйвер одного электродвигателя постоянного тока
Рис. 2. Драйвер двух электродвигателей постоянного тока
Рис. 3. Драйвер электродвигателя с регулятором скорости
Прибор BA6208 относится к группе простых драйверов одного реверсируемого двигателя постоянного тока и применяется в основном для управления двигателем кассетного магнитофона. Внутренняя схема драйвера BA6208 представлена на рис. 4. Управление драйвером осуществляется логическими сигналами, соответствующими ТТЛ-уровням.
Рис. 4. Внутренняя схема (типовая) драйвера BA6208
Таблица 2. Режимы работы драйвера одного реверсируемого двигателя постоянного тока
| Режим | Авх. (Fвх.) | В вх. (Rвх.) | Вых1 (Авых.) | Вых2 (Ввых.) |
| Вперед | 1 | 1 | ||
| Назад | 1 | 1 | ||
| Тормоз | 1 | 1 | ||
| Отключение | Z* | Z* |
Z* — разомкнутое состояние ключевого транзистора (OPEN)
Два управляющих входа (табл. 2) определяют четыре возможных режима работы драйвера: вращение вперед, назад (реверсирование), стоп и тормоз. В режиме торможения выводы электродвигателя соединяются с общим проводом питания, и осуществляется быстрый останов. В режиме «стоп» выводы электродвигателя отключаются от источника питания и останов происходит произвольно.
Основные характеристики драйвера BA6208:
- встроенные мощные (100 мА) транзисторы;
- режим торможения при высоких уровнях логического сигнала на обоих входах;
- встроенные диоды для защиты от бросков тока;
- очень низкий ток потребления в режиме standby, когда на обоих входах низкий логический уровень;
- широкий диапазон питающих напряжений 4,5–15 В;
- управление непосредственно ТТЛ-уровнями.
Таблица 3. Максимальные значения BA6208 (T a =25 °С)
| Параметр | Обозн. | Макс. | Ед. | |
| Напряжение питания | VCC | 18 | 8 | |
| Мощность расс. | BA6208 | Pd | 700* | мВт |
| BA6208F | Pd | 450** | мВт | |
| Рабочая температура | Topr | –40 +60 | °C | |
| Температура хранения | Tstg | –55+125 | °C | |
| Макс. выходной ток | Iout | 500 | мА | |
* понижается на 7 мВт на каждый 1 °С выше 25 °С
** понижается на 4,5 мВт на каждый 1 °С выше 25
Драйвер BA6209 аналогичен предыдущему, за исключением отсутствия режима «стоп». Основная область применения BA6209 — это кассетные магнитофоны и видеомагнитофоны.
Основные характеристики драйвера BA6208:
- мощные выходные транзисторы могут выдерживать ток до 1,6 А;
- обязательный режим торможения при останове двигателя;
- встроенные диоды для защиты от бросков тока;
- наличие вывода управления скоростью двигателя;
- низкий ток потребления в режиме standby (типовое значение Vcc=12 В, Io=5,5 мА);
- идентичные характеристики при изменении направления вращения;
- КМОП-уровни управления.
Рис. 5. Схема включения драйвера BA6209
Таблица 4. Максимальные значения (Ta=25 °С) BA6209
Таблица 5. Описание выводов драйвера BA6209
| Номер вывода | Обозначение | Назначение |
| 1 | GND | Общий провод |
| 2 | OUT1 | Вывод подключения двигателя |
| 3 | VZ1 | Вывод подключения конденсатора для предотвращения одновременного включения вых. транзисторов |
| 4 | Vref | Вывод установки уровня «высокий». |
| 5 | FIN | Логический вход |
| 6 | RIN | Логический вход |
| 7 | VCC1 | Питание внутреннего блока управляющей логики |
| 8 | VCC2 | Питание выходного силового драйвера |
| 9 | VZ2 | Вывод подключения конденсатора для предотвращения одновременного включения вых. транзисторов |
| 10 | OUT2 | Вывод подключения двигателя |
 Рис. 6. Входной управляющий сигнал
Рис. 6. Входной управляющий сигнал
Для уменьшения мощности, рассеиваемой микросхемой, и в целях защиты от пробоя необходимо к выводу питания силового драйвера обязательно подключать последовательно резистор величиной 3–10 Ом. Время нарастания и спада управляющего логического сигнала (рис. 7) должно быть менее 5 мс, иначе возможна некорректная работа и выход из строя микросхемы.
Рис. 7. Схема включения драйвера BA6218
Потенциал общего вывода микросхемы должен быть всегда ниже потенциала других выводов. На входы нельзя подавать напряжение, пока микросхема не запитана. После подключения питания к выводу Vcc, на другие выводы не может быть подан потенциал выше, чем на Vcc.
Рис. 8. Схема включения драйвера BA6219B
Драйвер BA6218 рассчитан на максимальный выходной ток 0,7 А. Логическая часть и силовая имеют отдельные «земляные» выводы. При подключении электронного регулятора микросхема может использоваться для управляемого реверса и в режиме регулятора скорости. Управление режимами осуществляется по двум входам логическими сигналами с ТТЛ-уровнями.
Драйверы BA6219B и BA6219BFP-Y позволяют управлять скоростью вращения двигателя, изменяя прикладываемое напряжение. Выходной ток может достигать 2,2 А. Имеется встроенная защита от перегрева.
Рис. 9. Схема включения драйвера BA6229
Драйвер BA6229 потребляет в статическом режим всего 1 мА при напряжении питания Vcc=12 В. Диапазон питающих напряжений составляет 8–23 В. Входные управляющие уровни — КМОП.
Рис. 10. Блок-схема драйвера BA6229
Рис. 11. Схема включения драйвера BA6238A
BA6950FS (рис. 12) является драйвером реверсируемого коллекторного двигателя. Два логических входа позволяют управлять четырьмя возможными режимами работы. Скорость вращения задается произвольно, и управлять ею можно по отдельному выводу микросхемы. Встроенная схема температурной защиты срабатывает при достижении 175 °С и возврат в рабочий режим происходит при снижении температуры на 20 °С. Встроенная функция стабилизации частоты вращения реализована посредством контроля и коррекции потребляемого тока. Контроль тока осуществляется измерением падения напряжения на последовательном шунте и усилением сигнала рассогласования.
Рис. 12. Схема включения драйвера BA6950FS
Таблица 6. Режимы работы драйвера двух реверсируемых двигателей постоянного тока
Ардуино для начинающих. Урок 9. Моторы и транзисторы
Сегодня мы поговорим о транзисторах и подключении нагрузки к Arduino. Сама Ардуино не может выдать напряжение выше 5 вольт и ток больше 40 мА с одного пина. Этого достаточно для датчиков, светодиодов, но если мы хотим подключить устройства более требовательные по току, нам придется использовать транзисторы или реле. В этом уроке мы подключим девяти вольтовый моторчик и сервопривод к ардуино с помощью транзисторов.
В этом уроке используется:
| Arduino Uno: | Купить |
| Инфракрасный дальномер: | Купить |
| Высокоточный лазерный дальномер с I2C: | Купить |
| Набор резисторов из 100 штук на все случаи: | Купить |
| Небольшой моторчик: | Купить |
| Слабенький сервопривод: | Купить |
| Мощный сервопривод: | Купить |
| Мосфет транзистор для управления переменным током высокого напряжения: | Купить |
| Набор npn транзисторов из 100 штук: | Купить |
Подключение мотора к Arduino
Как уже было сказано выше, ардуино не может обеспечить мотор необходимым током и напряжением. В таких случаях используются транзисторы.
Транзистор это радиоэлектронный компонент из полупроводникового материала способный от небольшого входного сигнала управлять значительным током в выходной цепи, что позволяет его использовать для усиления, генерирования, коммутации и преобразования электрических сигналов. Обычно у транзисторов 3 вывода: база, эмиттер и коллектор. Алгоритм действия можно сформулировать так: пропустить ток от коллектора к эмиттеру в зависимости от сигнала на базе. Транзисторы бывают разных типов и номиналов. Об этом можно подробнее почитать на википедии.
Будьте внимательны при выборе транзисторов для своих проектов. Некоторые рассчитаны на пропуск большого напряжения, или большого тока. Так же многие транзисторы не откроются от 5 вольт на базе. Всегда проверяйте характеристики транзисторов перед покупкой в datasheet. Так же обратите внимание, что для управления переменным током используются мосфет транзисторы.
Теперь давайте подключим мотор к ардуино по следующей схеме:
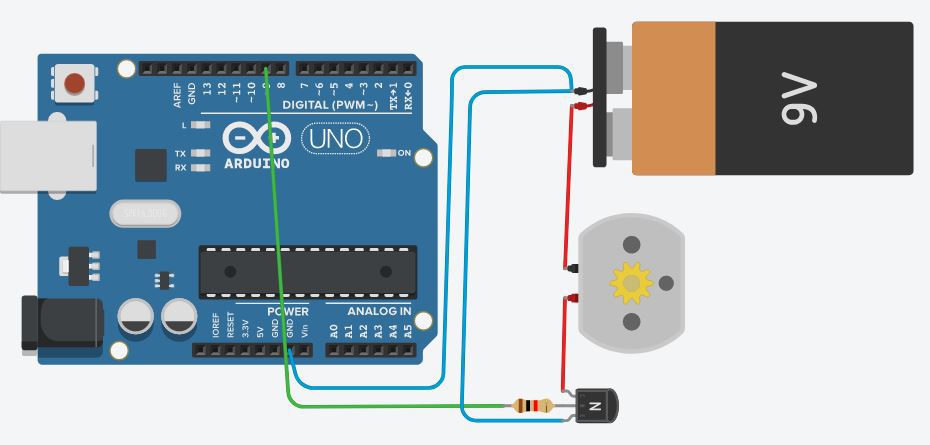 Подключение мотора к ардуино
Подключение мотора к ардуино
Как всегда ничего сложного. Главное не перепутать выводы транзистора. Обратите внимание на резистор через который ардуино подключена к базе. Это резистор на 1 кОм и нужен он для того что бы обезопасить нашу ардуинку. В видео к схеме добавлены диод и конденсатор, но они не обязательны. Так же можно добавить резистор на 10 — 100 кОм между эмиттером и коллектором для стабильности работы нашей схемы. Так же не забудьте, что земля на всех уровнях напряжения должна быть объединена. И взглянем на наш код:
Как видите скетч очень прост. По комментариям в коде вы легко разберетесь, что к чему. Единственная конструкция, которую мы еще не использовали это цикл for.
Подключение сервопривода практически ни чем не отличается от подключения моторчика. Отличие в том что у сервы 3 вывода. Плюс, минус и логический. В видео подробно об этом рассказано.
Добавим в нашу схему инфракрасный дальномер. Просто потому, что мы можем Будем задавать положение сервопривода в зависимости от показаний дальномера. Мы уже подключали дальномер, поэтому схему рисовать не буду.
Подключаем его к пину А0. Новый скетч стал еще проще:
5 комментариев
Добрый день! Что то не получается с транзистором. Взял кт815Г (что было). Эмитер соединил с землей (самая левая ножка). на землю посадил землю от бп (8V) и землю от ардуино. К коллектору (средняя ножка) присоединил лампочку одним выводом. К другому выводу лампочки присоединил + от БП 8V.
базу (крайняя правая ножка) завел на землю через резистор 10К. На базу подал 5V от ардуино через резистор 1К. И ничего….
Попробуйте для начала проверить сам транзистор, подав 5 В на базу (через резистор). Если он рабочий, то лампа загорится.
Напишите, для примера, какие транзисторы можно использовать. Или какие у них должны быть характеристики. Также неясно как подбирать резистор между эмиттером и коллектором и о какой стабильности идет речь.
Дмтрий можешь помощь, и немогу написать код с шаговым двигателем и датчиком света, немогу их вместе свезат что когда на улице светло он крутится в одну сторону ждёт пока не стемнет и крутица в другую сторону и там ждёт пока не рвсветет
Объясните пожалуйста, почему вы пишите, что необходимо провести ток от коллектора к эмиттеру, при этом к коллектору у вас подключен мотор. какой сигнал в таком случае усиливает транзистор? разве он не должен быть между питанием и мотором, то есть в роли эмиттера будет мотор?
Добавить комментарий Отменить ответ
Для отправки комментария вам необходимо авторизоваться.
Биполярные транзисторы: принцип работы, характеристики и параметры
Биполярные транзисторы – электронные полупроводниковые приборы, отличающиеся от полевых способом переноса заряда. В полевых (однополярных) транзисторах, используемых в основном в цифровых устройствах, заряд переносится или дырками, или электронами. В биполярных же в процессе участвуют и электроны, и дырки. Биполярные транзисторы, как и другие типы транзисторов, в основном используются в качестве усилителей сигнала. Применяются в аналоговых устройствах.
Особенности устройства биполярного транзистора
Биполярный транзистор включает в себя три области:
- эмиттер;
- базу – очень тонкую, которая изготавливается из слаболегированного полупроводника, сопротивление этой области высокое;
- коллектор – его область больше по размерам, чем область эмиттера.
К каждой области припаяны металлоконтакты, служащие для подсоединения прибора в электроцепь.
Электропроводность коллектора и эмиттера одинакова и противоположна электропроводности базы. В соответствии с видом проводимости областей, различают p-n-p или n-p-n приборы. Устройства являются несимметричными из-за разницы в площади контакта – между эмиттером и базой она значительно ниже, чем между базой и коллектором. Поэтому К и Э поменять местами путем смены полярности невозможно.
Принцип работы биполярного транзистора
Этот тип транзистора имеет два перехода:
- электронно-дырочный между эмиттером и базой – эмиттерный;
- между коллектором и базой – коллекторный.
Дистанция между переходами маленькая. Для высокочастотных деталей она составляет менее 10 мкм, для низкочастотных – до 50 мкм. Для активации прибора на него подают напряжение от стороннего ИП. Принцип действия биполярных транзисторов с p-n-p и n-p-n переходами одинаков. Переходы могут функционировать в прямом и обратном направлениях, что определяется полярностью подаваемого напряжения.
Режимы работы биполярных транзисторов
Режим отсечки
Переходы закрыты, прибор не работает. Этот режим получают при обратном подключении к внешним источникам. Через оба перехода протекают обратные малые коллекторные и эмиттерные токи. Часто считается, что прибор в этом режиме разрывает цепь.
Активный инверсный режим
Является промежуточным. Переход Б-К открыт, а эмиттер-база – закрыт. Ток базы в этом случае значительно меньше токов Э и К. Усиливающие характеристики биполярного транзистора в этом случае отсутствуют. Этот режим востребован мало.
Режим насыщения
Прибор полностью открыт. Оба перехода подключаются к источникам тока в прямом направлении. При этом снижается потенциальный барьер, ограничивающий проникновение носителей заряда. Через эмиттер и коллектор начинают проходить токи, которые называют «токами насыщения».
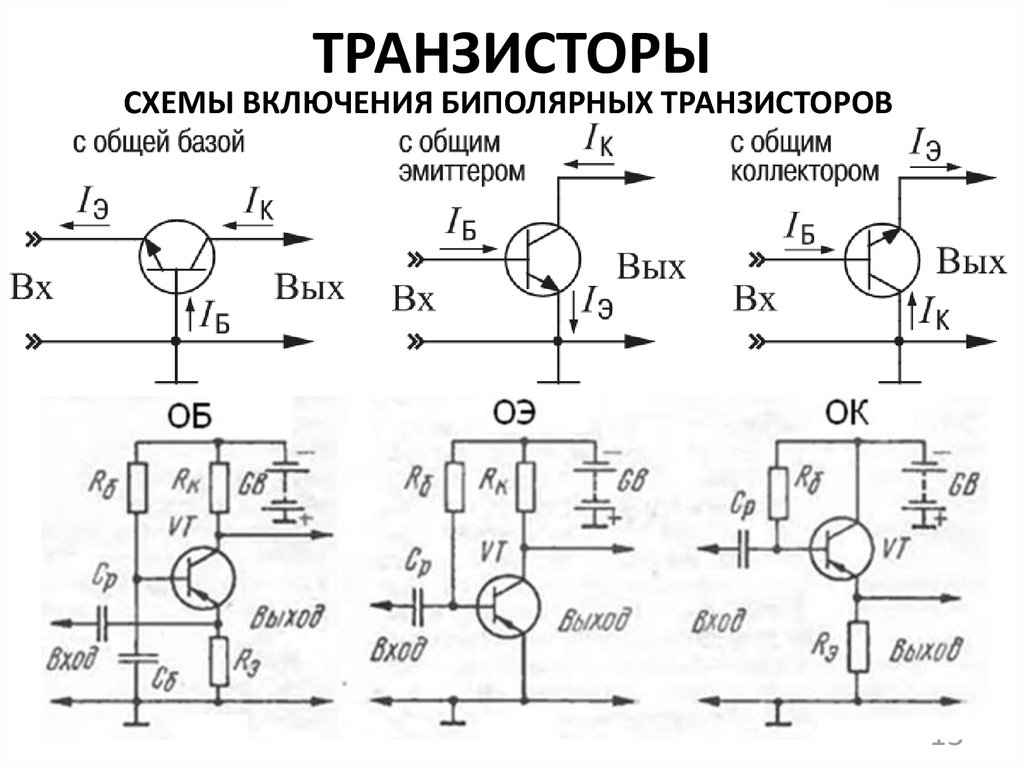
Схемы включения биполярных транзисторов
В зависимости от контакта, на который подается источник питания, различают 3 схемы включения приборов.
С общим эмиттером
Эта схема включения биполярных транзисторов обеспечивает наибольшее увеличение вольтамперных характеристик (ВАХ), поэтому является самой востребованной. Минус такого варианта – ухудшение усилительных свойств прибора при повышении частоты и температуры. Это означает, что для высокочастотных транзисторов рекомендуется подобрать другую схему.
С общей базой
Применяется для работы на высоких частотах. Уровень шумов снижен, усиление не очень велико. Каскады приборов, собранные по такой схеме, востребованы в антенных усилителях. Недостаток варианта – необходимость в двух источниках питания.
С общим коллектором
Для такого варианта характерна передача входного сигнала обратно на вход, что существенно уменьшает его уровень. Коэффициент усиления по току – высокий, по напряжению – небольшой, что является минусом этого способа. Схема приемлема для каскадов приборов в случаях, если источник входного сигнала обладает высоким входным сопротивлением.
Какие параметры учитывают при выборе биполярного транзистора?
- Материал, из которого он изготовлен, – арсенид галлия или кремний.
- Частоту. Она может быть – сверхвысокая (более 300 МГц), высокая (30-300 МГц), средняя – (3-30 МГц), низкая (менее 3 МГц).
- Максимальную рассеиваемую мощность.
Была ли статья полезна?

Комментарии
Оптовая продажа электронных компонентов и радиодеталей с доставкой по всей России