

Что такое двигатель с плоским якорем
Конструкции исполнительных двигателей постоянного тока
По конструкции исполнительные двигатели можно разделить на двигатели с ферромагнитным якорем и малоинерционные, не имеющие ферромагнитного сердечника якоря.
Двигатели с ферромагнитным якорем и обмоткой возбуждения отличаются от обычных машин лишь тем, что имеют полностью шихтованную магнитную систему (якорь, полюса, станину), что продиктовано стремлением уменьшить потери в стали и увеличить быстродействие в переходных режимах. Это двигатели серий СЛ, МИ, ПБС и др. Есть двигатели (серии ДП и ДПМ), в которых роль обмотки возбуждения выполняют постоянные магниты. В остальном они ничем не отличаются от названных выше.
Существуют двигатели, например серии МИГ, в которых обмотка якоря располагается не в пазах (их нет), а непосредственно на поверхности якоря, закрепляясь на ней с помощью специального клея и бандажей. «Беспазовое» исполнение обмотки значительно уменьшает ее индуктивность, улучшает коммутацию и увеличивает быстродействие. Недостатком гладкого якоря является большой немагнитный промежуток между ним и полюсом, что увеличивает размеры обмотки возбуждения.
Малоинерционные двигатели выпускаются двух типов: 1) с дисковым якорем и печатной обмоткой; 2) с полым немагнитным якорем и обычной обмоткой. Один из вариантов двигателя первого типа показан на рис. 2.14. В его состав входят: дисковый якорь 1, выполненный из тонкого изоляционного материала, на обеих сторонах которого фотохимическим методом нанесена обмотка якоря; кольца 2 и 3 из магнитомягкой стали, по которым замыкается магнитный поток, созданный постоянными магнитами 4, и щетки 5, непосредственно касающиеся оголенных проводников якоря. Как видно, здесь отсутствует отдельный коллектор.
Двигатель второго типа показан на рис. 2.15.
Якорь малоинерционных двигателей примерно в 8 раз легче, а момент инерции в 5¸ 10 раз меньше, чем у обычного двигателя. В результате их постоянные времени в 2¸ 2,5 раза меньше. К тому же они имеют практически безыскровую коммутацию, поскольку их секции обладают меньшей индуктивностью. К недостаткам таких двигателей можно отнести большой воздушный зазор, а, следовательно, большие габариты по сравнению с обычными машинами.

Тахогенераторы
Общие сведения
Тахогенераторами (ТГ) называются электрические машины небольшой мощности, преобразующие механическое вращение в электрический сигнал.
Главное требование, предъявляемое к тахогенераторам, заключается в линейности выходной характеристики – пропорциональной зависимости между выходным напряжением U и угловой скоростью вращения n:
 , (4.1)
, (4.1)
где: k, k’ – коэффициенты пропорциональности;  – угол поворота.
– угол поворота.
Из уравнения (4.1) видно, что тахогенераторы можно использовать для измерения скорости вращения и для электромеханического дифференцирования, если за входной сигнал принять угол поворота ротора.
По роду тока тахогенераторы можно разделить на ТГ переменного и ТГ постоянного тока.
Асинхронный тахогенератор
Конструкция асинхронного тахогенератора ничем не отличается от асинхронного исполнительного двигателя с полым немагнитным ротором. Как и в ИД, одна из обмоток статора подключается к сети переменного тока и называется обмоткой возбуждения (ОВ), с другой – генераторной обмотки (ГО) снимается выходное напряжение (рис. 4.1).
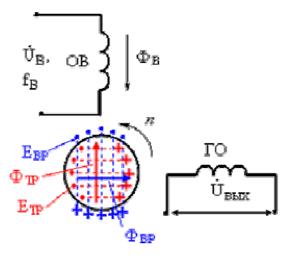
Рис. 4.1. К вопросу о принципе действия асинхронного тахогенератора
Принцип действия асинхронного тахогенератора заключается в следующем. (Для упрощения качественного анализа примем полый ротор состоящим из конечного числа витков, замкнутых на торцах).
При питании обмотки возбуждения переменным током частоты  возникает пульсирующий магнитный поток
возникает пульсирующий магнитный поток  , который во вращающемся роторе индуцирует два вида ЭДС: трансформаторную ЭДС –
, который во вращающемся роторе индуцирует два вида ЭДС: трансформаторную ЭДС –  (показана внутри ротора) и ЭДС вращения –
(показана внутри ротора) и ЭДС вращения –  (показана снаружи ротора).
(показана снаружи ротора).
В контурах, перпендикулярных оси обмотки возбуждения, под действием трансформаторной ЭДС протекают токи и возникает поток  , который в соответствии с принципом Ленца направлен встречно потоку обмотки возбуждения, однако его действие компенсируется увеличением тока возбуждения. Так как ось генераторной обмотки перпендикулярна потоку , он не будет индуцировать в ней никакой ЭДС.
, который в соответствии с принципом Ленца направлен встречно потоку обмотки возбуждения, однако его действие компенсируется увеличением тока возбуждения. Так как ось генераторной обмотки перпендикулярна потоку , он не будет индуцировать в ней никакой ЭДС.
В контурах, параллельных оси обмотки возбуждения, но теперь уже под действием ЭДС вращения тоже протекают токи, которые создают свой поток  . Он, пульсируя по оси генераторной обмотки, и наводит в ней выходную ЭДС.
. Он, пульсируя по оси генераторной обмотки, и наводит в ней выходную ЭДС.
Если принять, что магнитный поток возбуждения является гармонической функцией времени  , то мгновенное значение ЭДС вращения будет
, то мгновенное значение ЭДС вращения будет  . Ток, созданный этой ЭДС,
. Ток, созданный этой ЭДС,  . (Индуктивным сопротивление ротора можно пренебречь, поскольку он немагнитный, да к тому же выполнен из материала с высоким удельным сопротивлением). При отсутствии насыщения магнитный поток пропорционален току
. (Индуктивным сопротивление ротора можно пренебречь, поскольку он немагнитный, да к тому же выполнен из материала с высоким удельным сопротивлением). При отсутствии насыщения магнитный поток пропорционален току  . Тогда мгновенное значение выходной ЭДС будет
. Тогда мгновенное значение выходной ЭДС будет  . Угловая частота сети
. Угловая частота сети  . Так как ЭДС изменяется по гармоническому закону, ее действующее значение будет
. Так как ЭДС изменяется по гармоническому закону, ее действующее значение будет
 .
.
Таким образом, величина выходной ЭДС асинхронного тахогенератора пропорциональна угловой скорости вращения, а ее частота равна частоте сети возбуждения.
При подключении нагрузки выходное напряжение  станет меньше ЭДС
станет меньше ЭДС  на величину внутреннего падения напряжения
на величину внутреннего падения напряжения 
В общем случае асинхронный тахогенератор (АТГ) представляет несимметричную двухфазную машину, которую можно исследовать методом симметричных составляющих, что приводит к следующему выражению выходной характеристики [1]
где  – коэффициент трансформации АТГ; – напряжение возбуждения;
– коэффициент трансформации АТГ; – напряжение возбуждения;  – относительная частота вращения;
– относительная частота вращения;  и
и  – комплексные коэффициенты, зависящие от величины и характера нагрузки
– комплексные коэффициенты, зависящие от величины и характера нагрузки  , от параметров схемы замещения АТГ.
, от параметров схемы замещения АТГ.
Как следует из выражения (4.2), выходное напряжение не является линейной функцией относительной угловой скорости вращения  . Нелинейность создает квадратичная зависимость
. Нелинейность создает квадратичная зависимость  . Если
. Если  , то становится пропорциональным , а тахогенератор считается идеальным. При проектировании АТГ выражение стремятся уменьшить как за счет уменьшения так и за счет уменьшения
, то становится пропорциональным , а тахогенератор считается идеальным. При проектировании АТГ выражение стремятся уменьшить как за счет уменьшения так и за счет уменьшения  .
.
Так как  , то с целью уменьшения тахогенераторы проектируют на большую частоту
, то с целью уменьшения тахогенераторы проектируют на большую частоту  . Правда при этом не уменьшают
. Правда при этом не уменьшают  , поскольку при
, поскольку при  , слабее проявляется магнитная несимметрия машины. Обычно
, слабее проявляется магнитная несимметрия машины. Обычно  .
.
Комплексный коэффициент В [1]:
 ,
,
где  – полное сопротивление обмотки возбуждения статора АТГ. Ясно, что с увеличением
– полное сопротивление обмотки возбуждения статора АТГ. Ясно, что с увеличением  , коэффициент будет уменьшаться. Вот почему ротор АТГ выполняют из материала с высоким удельным сопротивлением (фосфористой или марганцевой бронзы, манганина и др.)! Повышению линейности выходной характеристики способствует и работа при больших сопротивлениях нагрузки
, коэффициент будет уменьшаться. Вот почему ротор АТГ выполняют из материала с высоким удельным сопротивлением (фосфористой или марганцевой бронзы, манганина и др.)! Повышению линейности выходной характеристики способствует и работа при больших сопротивлениях нагрузки  . К уменьшению
. К уменьшению  и обычно не прибегают т.к. первое снижает крутизну выходной характеристики, а второе – увеличивает габариты АТГ.
и обычно не прибегают т.к. первое снижает крутизну выходной характеристики, а второе – увеличивает габариты АТГ.
Исполнительные двигатели с гладким беспазовым якорем
Исполнительные двигатели постоянного тока с гладким беспазовым якорем появились сравнительно недавно. Отличительной особенностью этих двигателей является то, что обмотка якоря у них располагается не в пазах (они отсутствуют), а укрепляется непосредственно на гладкой цилиндрической поверхности якоря с помощью клея-компаунда и бандажей. Такое расположение значительно уменьшает индуктивность обмотки, что приводит к улучшению коммутации и уменьшению электромеханической постоянной времени, т.е. повышению быстродействия двигателя. Недостатком двигателя с гладким беспазовым якорем является наличие значительного немагнитного промежутка на пути магнитного потока полюсов, который здесь складывается из воздушного зазора и толщины обмотки якоря. Исполнительные двигатели с гладким беспазовым якорем выпускаются как с электромагнитным возбуждением, так и с постоянными магнитами.
Бесконтактные исполнительные двигатели
Недостатком всех рассмотренных ранее исполнительных двигателей постоянного тока является наличие скользящих контактов — коллектора и щеток, которые значительно снижают надежность работы и ограничивают области их применения. С целью устранения этих недостатков в последнее время были разработаны и начали довольно широко применяться бесконтактные исполнительные (управляемые) двигатели постоянного тока, принципиально не отличающиеся от бесконтактных двигателей, рассмотренных ранее.
Эти двигатели (рис. 10.3) не имеют коллектора и щеток, что обеспечивает их более надежную работу в условиях тряски, вибрации, резко изменяющихся температур, при высоких частотах вращения, достигающих десятков и сотен тысяч оборотов в минуту, и значительно повышает срок службы.

Рисунок 10.3. Бесконтактный исполнительный двигатель типа ДБУ:
1-корпус; 2- индуктор-двухполюсный постоянный магнит; 3- магнитопровод статора; 4- вал; 5- обмотка якоря; 6- подшипниковый щит; 7- обмотка датчика положений; 8- контактная плата; 9- кожух; 10- сигнальные
элементы (постоянный магнит)
10.3. Малоинерционные двигатели постоянного тока
Одним из недостатков контактных исполнительных двигателей постоянного тока является то, что они имеют шихтованные из листов стали якоря с большим моментом инерции, что значительно снижает их быстродействие. Этих недостатков нет у разработанных сравнительно недавно, но получивших уже достаточно широкое применение так называемых малоинерционных двигателей.
Малоинерционные двигатели в зависимости от конструкции и технологии изготовления их якорей можно разделить на две группы: двигатели с печатной обмоткой якоря и двигатели с обмоткой якоря, выполненной из обычного изолированного провода. По своим пусковым и рабочим свойствам эти двигатели близки друг другу.
Малоинерционные двигатели с печатной обмоткой якоря
Двигатели с печатной обмоткой в настоящее время выпускаются в двух конструктивных вариантах: с дисковыми и цилиндрическими якорями.
Дисковый якорь с печатной обмоткой (рис. 10.4) выполняется в виде тонкого диска из изоляционного материала (например, стеклотекстолита), на обе стороны которого, обычно электрохимическим путем, наносятся соединяющиеся между собой части плоской (печатной) обмотки. Проводники секций (см. рис. 10.4, б) выполняются из медной фольги, с трех сторон окруженной воздухом (четвертой стороной фольга прилегает к диску). Все первые — начальные половины секций (на рисунке показаны толстой линией) располагаются на одной стороне диска. Все вторые половины секций (выполнены пунктиром) располагаются на другой стороне диска. Концы полусекций, расположенных на разных сторонах диска, соединяются между собой с помощью имеющихся в нем отверстий. Изоляцией между отдельными проводниками обмотки якоря служит материал диска.
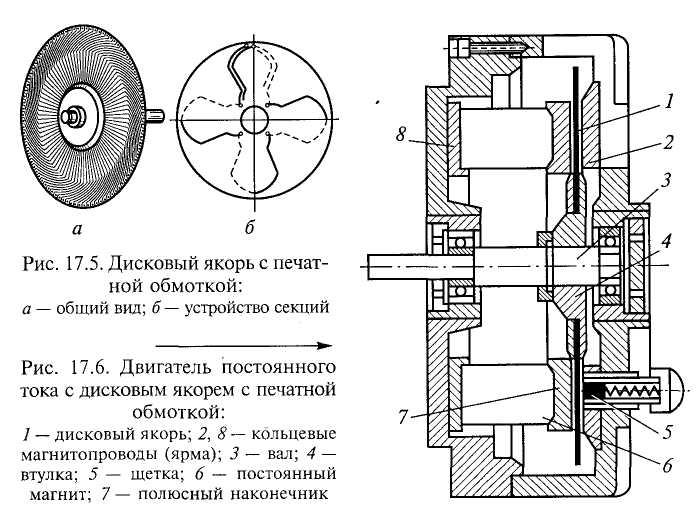
Рисунок 10.4. Дисковый якорь с печатной обмоткой:
а- общий вид; б- устройство секций
Дисковый якорь вращается между полюсами, создающими поток, направленный в воздушном зазоре аксиально (рис. 10.5). К печатной обмотке якоря посредством щеток, скользящих по неизолированным поверхностям проводников секций якоря, подводится напряжение. В результате взаимодействия тока проводников обмотки якоря с магнитным полем полюсов создается вращающий момент, так же как и в обычном двигателе постоянного тока.
Недостатком двигателей с дисковыми якорями является то, что при увеличении диаметра диска, вызванного необходимостью увеличения номинальной мощности двигателя, возрастает его момент инерции и ухудшается надежность работы вследствие возможного колебания диска при нагреве. Указанного недостатка лишены машины с полым цилиндрическим якорем, имеющим печатную обмотку.
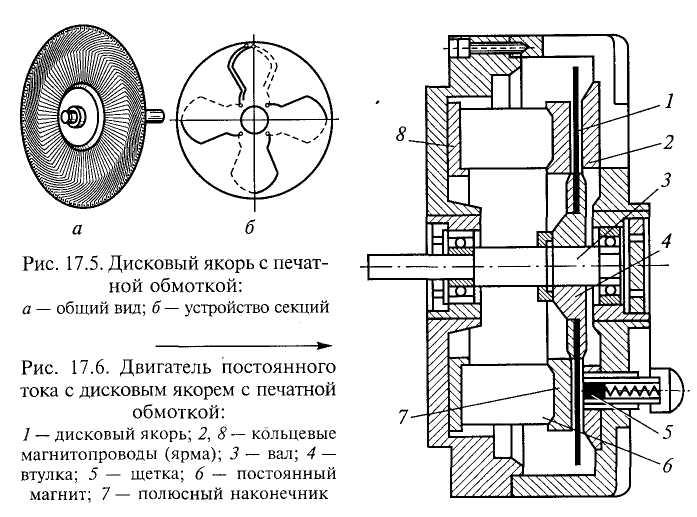
Рисунок 10.5. Двигатель постоянного тока с дисковым якорем с печатной обмоткой:
2,8- кольцевые магнитопроводы (ярмо);
6- постоянный магнит;
7- полюсный наконечник
Цилиндрический якорь с печатной обмоткой (рис. 10.6) изготовляется в виде полого цилиндра из изоляционного материала, на обе стороны которого (наружную и внутреннюю) наносятся соединяющиеся между собой части печатной обмотки. Концы секций обмотки выводятся к коллектору, расположенному на валу двигателя.
Наружная неподвижная часть двигателя с цилиндрическим якорем ничем не отличается от неподвижной части обычной машины постоянного тока. Она состоит из станины и полюсов, которые у исполнительных двигателей всегда выполняются шихтованными. Для уменьшения сопротивления на пути основного магнитного потока внутри полого цилиндрического якоря располагают сердечник внутреннего статора, который укрепляется либо на цилиндрическом выступе одного из подшипниковых щитов как внутренний статор асинхронного двигателя с полым ротором, либо с помощью подшипников на валу. Положительными качествами полого цилиндрического якоря с печатной обмоткой (по сравнению с дисковым) являются меньший момент инерции и большая механическая прочность.
Обычно двигатели с дисковым якорем рассчитывают на небольшие мощности — десятки, сотни ватт, двигатели же с цилиндрическим якорем — на мощности до 10 кВт.
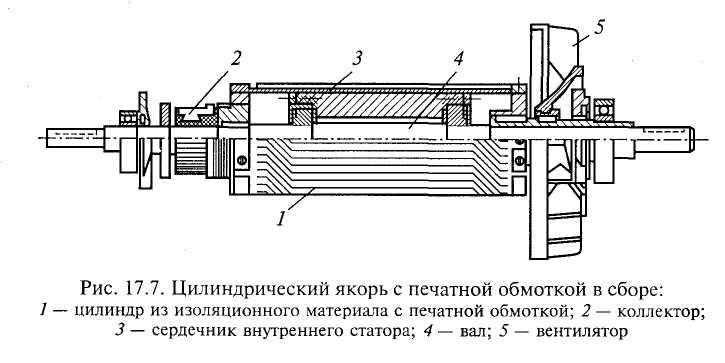
Рисунок 10.6. Цилиндрический якорь с печатной обмрткой в сборе:
1-цилиндр из изоляционного материала с печатной обмоткой; 2- коллектор; 3-сердечник внутреннего статора; 4- вал; 5- вентилятор
Положительными качествами исполнительных двигателей с дисковым и цилиндрическим якорями, имеющими печатные обмотки, являются:
высокая технологичность якоря, позволяющая до минимума сократить ручной труд;
малый момент инерции якоря;
отсутствие потерь в стали двигателя, так как вращающийся якорь не имеет ферромагнитных частей;
хорошая безискровая коммутация вследствие малой самоиндукции и взаимоиндукции коммутируемых секций, окруженных воздухом;
отсутствие сил магнитного притяжения, действующих на якорь даже при неравномерном воздушном зазоре, что разгружает подшипники и сильно уменьшает механические потери;
хорошее охлаждение проводников обмотки якоря при вращении, что позволяет значительно повысить плотность Тока в обмотке якоря;
высокий КПД при возбуждении постоянными магнитами, что объясняется отсутствием потерь в стали и весьма незначительными механическими потерями (в двигателе практически имеются лишь потери в обмотке якоря);
отсутствие необходимости в межвитковой и пазовой изоляции.
К недостаткам малоинерционных двигателей с печатными обмотками относятся:
большой немагнитный промежуток на пути магнитного потока, состоящий из двух воздушных зазоров и толщины якоря, который не содержит ферромагнитных материалов;
недостаточная прочность конструкции якорей, что приводит к их колебанию при больших температурах;
ограниченное из-за технологических трудностей число витков обмотки якоря; что вынуждает всегда применять последовательную (волновую) обмотку и рассчитывать двигатели либо на работу от сетей с небольшим напряжением, либо на работу при больших частотах вращения.
Вследствие большого немагнитного промежутка на пути потока малоинерционные двигатели, как правило, возбуждаются постоянными магнитами, которые могут располагаться как внутри, так и снаружи полого якоря. Большой немагнитный промежуток в этом случае, хотя и ведет к необходимости увеличения объема магнитов, не приводит к увеличению потерь в двигателе.
Что такое двигатель с плоским якорем
САМОДЕЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ТРЕХПОЛЮСНЫМ ЯКОРЕМ
Вы сделали простейший электродвигатель. Работать он стал, вероятно, не сразу, и пришлось порядочно потрудиться, чтобы якорь его начал вращаться.
В вашем изделии вы заметили много недостатков. Двигатель имеет «мертвые точки»: его иногда приходится вначале слегка подтолкнуть пальцем, чтобы он начал работать. Да и мощность его незначительна: ведь подключить его можно только к батарейке.
Теперь, когда вы уже приобрели небольшой опыт, сделаем более мощный двигатель, который мог бы привести в движение модели посложнее и побольше размером (рис. 1).
Этот двигатель можно установить в макете гидроэлектростанции, где он будет вращать вал с цветными лампочками. Его можно также использовать для вращения барабанчика в автоматическом переключателе и других моделях и установках.
Как видно из рисунка, вместо постоянного магнита в качестве статора здесь установлен электромагнит. Якорь нового двигателя имеет три полюса, а не два, как у предыдущей самоделки, да и коллектор выглядит иначе. Все остальные части новой модели такие же, как и у простейшего электродвигателя.
Сердечник статора собирается из 14 — 15 полосок жести, причем каждую полоску сначала изгибают в виде буквы «П» и после этого на нее накладывают другую пластинку такой же формы. Между ними прокладываются бумажные полосы, пропитанные клеем БФ-2 или каким-либо лаком.
Чтобы пластинки прочно соединились друг с другом, их связывают после склейки крепкой ниткой, пока клей или лак не просохнет. На верхнюю часть наматывается 6 — 7 метров провода в любой изоляции. Место, где ляжет первый слой обмотки, оклейте полоской бумаги — для изоляции. Обмотка ведет-
ся строго в одну сторону. Начало и конец обмотки пропускают через отверстие в двух щечках, надетых на верхнюю часть статора. Щечки выпиливаются из миллиметровой фанеры или старой чертежной линейки.
Все эти детали статора и его сборка хорошо видны на рисунке 2, где данный электродвигатель показан в трех положениях — спереди, сверху и сбоку.
Сердечник якоря собирается из 20 пластинок жести (рис. 3). Склеить их надо так же, как и пластины статора, при помощи бумажных прокладок, смазанных клеем БФ-2 или лаком.
Чтобы пластиночки не рассыпались во время склейки, насадите их на тоненький гвоздик. Когда клей высохнет, гвоздик вынимают, а вместо него вставляют в центральное отверстие отрезок вязальной спицы, который будет служить осью якоря.
Валик коллектора делается из изоляционной ленты так же, как и у самого простого двигателя (рис. 3). На него накладываются три медные пластиночки (ламели) с небольшими язычками. С помощью круглогубцев ламелям придают изогнутую форму, чтобы они плотно легли на валик коллектора.
Обмотка полюсов сердечника якоря делается проводом сечением 0,3 миллиметра в любой изоляции. Перед тем как начать обмотку, приклейте на те места, где ляжет провод, небольшие листочки тонкой бумаги. Это делают для того, чтобы случайно оголившийся виток обмотки не прикоснулся к жестяным полоскам, из которых составлен сердечник. Проволоку наматывают строго в одну сторону, по 4 метра на каждый полюс.
Закончив обмотку всех полюсов, припаяйте по схеме концы обмоток к язычкам ламелей, уложите ламели на барабанчик коллектора и закрепите их двумя резиновыми кольцами (рис. 3).
Якорь двигателя готов.
Стойки, щетки, установка статора на до-. щечке делаются так же, как и у предыдущего двигателя. Расположение всех деталей при сборке и соединение обмоток статора со щетками показаны на рисунке 2.
Присоединять двигатель следует к клеммам трансформатора, где написано «6 в».
Как выбрать электромотор с GPS-якорем?
Отвечает Александр Дьяченко
Последние два-три года я постоянно отвечаю на вопросы своих знакомых и знакомых знакомых о том, какой электромотор для рыбалки им купить. В основном речь идет о моторах оборудованных GPS-якорем, так называемым Ай-Пайлотом. Устройство, которое, без преувеличения, произвело революцию в лодочной рыбалке, как iPhone изменил навсегда мобильный телефон.
Первым, кто додумался оснастить GPS-приемником носовой троллинговый мотор, который используют американские рыбаки при ловле большеротого окуня, были инженеры компании MinnKota в далеком 2010 году.
Мотор, получив сигнал от небольшого пульта в руках рыболова, фиксирует положение катера на точке, постоянно сверяя положение датчика с GPS-координатами. Если лодка сместилась относительно заданных координат, процессор вычисляет направление, актуатор поворачивает штангу привода и включает с необходимой скоростью электромотор. Лодка быстро занимает прежнее положение на точке. Порой это происходит так быстро, что вы даже не сможете заметить, как это произошло. И все.
Таким образом, система i-Pilot выполняет функции якоря без веревки, удерживая ваш катер на месте, благодаря точному приемнику GPS. Теперь вы можете не опасаться, что ваш якорь застрянет в корягах, или крупная рыба на вываживании замотает шнур за якорный фал! Вам доступно якорение над любыми глубинами, хоть над Марианской впадиной! Никаких мокрых веревок, никаких грязных якорей и сорванной спины.

Те, кто много ловит джигом с лодки, знает, как важно бывает занять позицию относительно рельефа или препятствия на дне, где стоит рыба. Ошиблись на пару метров и все: пустые проводки одна за одной. С GPS-якорем такая проблема вас больше не будет волновать. Точка будет занесена в память мотора и вы сможете снова и снова возвращать катер на то же место, с точностью до метра, где у вас уже состоялась поимка рыбы.
Не менее интересна и другая функция — Track Back. Вы можете запомнить трек, по которому только что двигались, и функция Track Back i-Pilot сама, автоматически, вернет вас в исходную точку и провезет еще раз по этому маршруту! Незаменимая вещь, позволяющая курсировать медленно вдоль бровки или стенок камыша, не занимая при этом рук. Мотор, работающий от одного или нескольких аккумуляторов по 12 вольт, может часами бесшумно двигаться по водоему, не распугивая при этом рыбу, пока вы ее ловите.
А в 2013 году произошла вторая революция, благодаря неуёмным инженерам MinnKota. Появился интерфейсный протокол Link, который связал в единый комплекс электромотор и картплоттеры Humminbird высших серий линейки. Ловля рыбы с лодки заиграла новыми красками. Кроме популярных функций GPS-якоря и Track Back, мотор стал понимать команды GoTo — движение к заданной точке, Autopilot — движение с заданной скоростью по заданному маршруту и так далее.
Работа рыбопоискового комплекса стала более наглядной, благодаря большому экрану картплоттера, стало возможным запоминать больше точек или даже наносить их заранее. Очень интересная функция — движение по заданной глубине — изобате. К сожалению пока доступна только на водоемах со специальной картографией LakeMaster. В России таких водоемов, увы, пока нет.
Кроме этих функций мотор оснащен рядом других приспособлений:
Управляющий мотором педальный узел позволяет легко двигаться на катере в нужном направлении, останавливаться и задерживаться на месте, при этом ваши руки остаются совершенно свободными и вы можете совершать забросы приманки, не пропустив ни одного интересного места! Встроенная система контроля заряда аккумуляторов вовремя известит вас о необходимости подзарядки. Универсальный датчик эхолота имеет возможности для подключения к эхолотам Humminbird, Lowrance, Garmin и др. И вы можете наблюдать на экране эхограмму непосредственно под вашим судном, а не то, что уже осталось за кормой!
Очень многих волнует вопрос — насколько «прочно» стоит на GPS-якоре лодка во время сильного ветра и волн. Смею вас заверить — настолько «прочно», что многим якорям и не снилось. У меня есть опыт ловли с одной и той же лодки оборудованной якорем и электромотором в шквалистый ветер 10 м/с на крупном волжском водохранилище. И если мой тяжеленный якорь постоянно стаскивало с песчаного дна, то в том же самом месте, при такой же силе ветра год спустя, мой катер стоял как влитой. А бонусом было то, что так как нос не привязан веревкой ко дну, то его и не захлестывало накатывающей волной.
В 2013 году вслед за MinnKota выпустил свой мотор с GPS-якорем второй именитый производитель рыболовных электромоторов — MotorGuide. Во многом повторив конструкцию предшественника, инженеры учли недоработки моторов MinnKota и новый MotorGuide Xi5 быстро завоевал популярность у немалого количества рыболовов. Он легче, его процессор быстрее и мощнее, а за позиционирование отвечает более совершенный чипсет GPS. Кроме того, его управляющая педаль не имеет шнура и связывается с мотором при помощи wi-fi, что безусловно удобнее и практичнее, чем вечно болтающийся под ногами провод.

Появление MotorGuide Xi5 с системой PinPoint GPS и интерфейсного кабеля MotorGuide GateWay Kit сделало доступными функции GoTo и Autopilot для владельцев картплоттеров Lowrance серии HDS GEN2 и GEN3. А недавно, испытав новый модуль Lowrance 3D Scan, мне стало очевидно, что по части позиционирования лодки на рельефе, инженеры группы Brunswick, куда входят марки Lowrance и MotorGuide, уже обогнали инженеров MinnKota. Но и последние не стояли на месте, и предложили рынку модель MinnKota Ulterra, оборудованную функцией автоматического опускания штанги мотора. Правда, первая партия Ulterra вышла с каким то заводским браком и по отзывам на американских форумах, у моторов перегорала управляющая плата. Первую партию отозвали и устранили недостаток. На сегодняшний день это единственный мотор с автоматической системой опускания штанги, что дало новый импульс в развитии этой техники, я уверен.
Часто, у потенциальных пользователей возникает вопрос — насколько надежна данная техника? Для начала, я бы хотел всех предостеречь от неквалифицированной установки. С виду, установка носового троллингового мотора не кажется сложной, но тем не менее требует определенного опыта и квалификации. Это касается и качества электрических соединений и монтажа на катер. Контакты проводки должны быть тщательно обжаты, подобраны силовые кабеля надлежащего сечения, и обязательно, в цепь должно быть установлено тепловое реле, которое защитит довольно дорогой узел — управляющий блок мотора от выгорания при превышении нагрузок на мотор. Деталька эта не из дешевых — около 300 долларов. А фирменное миннкотовское реле — около 50 долларов.

За несколько лет обслуживания и ремонта троллинговых моторов, мы в boatlab.pro, накопили статистику по наиболее распространенным поломкам троллинговых моторов и решений ремонта по ним. Советую вам опасаться намотки на вал винта мотора плетеной лески — она моментально уползает под сальник и быстро разбивает его, делая силовую часть мотора — электродвигатель, доступной для воды. А это в 90% случаев — замена якоря электромотора — очень дорогое удовольствие.
Еще одна распространенная проблема — ударные нагрузки в районе двигателя. Часто, при швартовке, уставший за день интенсивной рыбалки капитан невнимательно подходит к причалу и смонтированный на носу катера мотор получает повреждения от соприкосновением с причальными сооружениями. На вид у мотора может и не быть видимых повреждений, но, даже незаметное искривление вала винта, способно быстро вывести из строя сальник и открыть доступ воде к электродвигателю. Или кусочек мощного магнита может отколоться от стенок мотора и тоже нанести непоправимый вред ротору двигателя.
Кроме того, мы выявили еще одну особенность, присущую правда только моторам MotorGuide Xi5 — травмирование при доставке. Упаковка мотора спроектирована в расчете на аккуратных американских грузчиков, а не на реалии российских почтовых и грузо-перевозок. Защита вала винта и самого узла, где находится электродвигатель явно недостаточна и мы часто наблюдаем, как к нам привозят моторы с погнутыми валами и даже отколотыми кусочками корпуса. Если вы покупаете мотор самостоятельно в США, убедительно рекомендую вам поговорить с продавцом о дополнительной защите вашей покупки — иначе есть вероятность, что по приходу к вам долгожданной игрушки, вы получите не радость от покупки, а гнев и разочарование. Все остальные компоненты, при правильном монтаже и подключении будут служить вам годами, хотя, как вы и сами понимаете, ничто не вечно и любая техника может дать сбой. И поэтому особенно важно кто и как обслуживает ваш катер и ваш рыбопоисковый комплекс.

Заканчивая статью, хотел бы ответить еще на один, пожалуй самый распространенный вопрос — какой мощности мотор нужен для какого катера. Сразу скажу — что подбирать мотор исходя только из размеров катера не совсем правильно. Важен ряд параметров, кроме длины. Надводная и подводная парусность, водоизмещение, тип судна и так далее. Кроме того, учитывайте также и район основного базирования — где вы больше всего рыбачите, на каких водоемах. На мощном нижневолжском течении, или в закрытых тростником лиманах краснодарского края? Это также играет роль. Но от себя скажу так: «Запас карман не тянет». И чтобы ваш GPS-якорь доставлял вам удовольствие, а не проблемы — берите всегда с небольшим превышением.
Ответить на все вопросы в скромной статье не представляется возможным. Я попытался обозначить ответы на самые волнующие и распространенные. И напоследок, хотел бы заметить, что носовой троллинговый мотор — обязательный атрибут всех профессиональных американских спортсменов-рыболовов. На подавляющем большинстве катеров российского профессионального турнира Pro Anglers League установлены моторы с GPS-якорем! А в Италии применение системы i-Pilot в соревнованиях даже запрещена — такое огромное преимущество над соперниками дает использование этой системы!

Официально предупреждаю вас: однажды попробовав рыбачить с лодки при помощи троллингового мотора с GPS-якорем, вы уже не сможете вернуться к тяжелому якорю и мокрой веревке.
§28. Обмотки якоря
Принцип соединения отдельных проводников в обмотку.
В современных машинах постоянного тока применяют барабанные якоря, в которых проводники обмотки укладывают в пазы на наружной поверхности цилиндрического якоря.
При выполнении обмотки проводники, расположенные в пазах якоря, следует соединять таким образом, чтобы э. д. с. в них складывалась. Для этого два проводника, образующие виток обмотки, должны соединяться так, как указано на рис. 92, а, т. е. проводник А, расположенный под северным полюсом, должен соединяться с проводником Б, расположенным под южным полюсом.
 Рис. 92. Принцип выполнения обмотки барабанного якоря
Рис. 92. Принцип выполнения обмотки барабанного якоря
Расстояние между проводниками, составляющими виток, должно быть равно или незначительно отличаться от полюсного деления т — расстояния между осями соседних полюсов. При этом условии виток будет охватывать весь магнитный поток полюса и э. д. с, возникающая в нем при вращении якоря, будет иметь наибольшее значение.
Для наглядного изображения обмоток цилиндрическую поверхность якоря вместе с обмоткой развертывают в плоскость и все соединения проводников изображают в виде прямых линий на плоскости чертежа (рис. 92,б).
Обмотка якоря состоит из отдельных секций. Секцией называют часть обмотки, расположенную между двумя коллекторными пластинами, следующими одна за другой по ходу обмотки. Число секций S в обмотке равно числу коллекторных пластин К. Секция может состоять из одного или нескольких последовательно соединенных витков. В первом случае секции называют одновитковыми (рис. 93, а, см. рис. 85, б), во втором — многовитковыми (рис. 93, б, см. рис. 85, а).
 Рис. 93. Схемы одновитковой (а) и многовитковой (б) секций: 1 — активные проводники; 2 — лобовая часть; 3 — активная сторона; 4 — коллекторные пластины
Рис. 93. Схемы одновитковой (а) и многовитковой (б) секций: 1 — активные проводники; 2 — лобовая часть; 3 — активная сторона; 4 — коллекторные пластины
Одновитковые секции состоят из двух активных проводников, которые непосредственно пересекают магнитный поток; активные проводники расположены в пазах якоря и соединяются лобовыми частями, лежащими вне сердечника якоря. Лобовые части в индуцировании э. д. с. практически не участвуют.
Многовитковые секции состоят из двух активных сторон, каждая из которых объединяет несколько активных проводников. В некоторых машинах большой мощности применяют якорные катушки, выполненные из разрезных секций (см. рис. 85, в §27). Обмотка якоря, состоящая из таких секций, называется стержневой.
Все секции обмотки обычно имеют одинаковое число витков. На схемах обмотки секции для простоты всегда изображают одновитковыми. Секцию обмотки укладывают в пазы таким образом, чтобы одна из ее активных сторон находилась в верхнем слое, а другая — в нижнем. На схемах стороны секции, расположенные в верхнем слое, изображают сплошными линиями, а в нижнем слое — штриховыми.
При объединении нескольких секций в якорную катушку каждую из сторон якорной катушки в большинстве случаев укладывают в один общий паз. Для того чтобы э. д. с, индуцированные в отдельных секциях, складывались, при соединении их руководствуются тем же правилом, что и при соединении проводников в витки: расстояние между соединяемыми частями секций должно быть приблизительно равно расстоянию между осями полюсов.
Обмотки якоря подразделяются на две основные группы: петлевые (параллельные) и волновые (последовательные).
Простая волновая обмотка.
 Рис. 94. Общий вид волновой обмотки (а) и схема соединения ее секций (б)
Рис. 94. Общий вид волновой обмотки (а) и схема соединения ее секций (б)
При этом после одного обхода окружности якоря, т. е. после последовательного соединения р секций приходят к коллекторной пластине, расположенной рядом с исходной.
Например, начало секции 1 присоединяют к коллекторной пластине КП1, а ее конец соединяют с коллекторной пластиной КП10 и началом секции 2, которая расположена под следующей парой полюсов; затем конец секции 2 соединяют с другой коллекторной пластиной и с началом следующей секции. После завершения полного обхода окружности якоря конец соответствующей секции соединяют с коллекторной пластиной КП2 и началом секции 3, затем таким же образом с коллекторной пластиной КП11 и секцией 4 и т. д. до тех пор, пока обмотка не замкнется, т. е. пока не придут к началу секции 1.
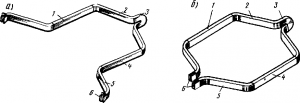 Рис. 95. Форма якорных катушек при волновой (а) и петлевой (б) обмотках: 1, 4 — пазовые части (верхняя и нижняя стороны); 2, 5 — задняя и передняя лобовые части; 3 — задняя головка; 6 — концы секций, припаиваемые к коллектору
Рис. 95. Форма якорных катушек при волновой (а) и петлевой (б) обмотках: 1, 4 — пазовые части (верхняя и нижняя стороны); 2, 5 — задняя и передняя лобовые части; 3 — задняя головка; 6 — концы секций, припаиваемые к коллектору
Для выполнения обмотки необходимо знать ее результирующий шаг у (см. рис. 94, б), первый у1 и второй у2 частичные шаги, а также шаг по коллектору ук. Указанные шаги обычно выражают в числе пройденных секций (шаг по коллектору выражается в этих же единицах, так как число коллекторных пластин равно числу секций).
В простой волновой обмотке число параллельных ветвей обмотки 2а всегда равно двум и не зависит от числа полюсов:
2a = 2 (56)
На рис. 96, а приведена в качестве примера развернутая в плоскость схема простой волновой обмотки якоря четырехполюсной машины, имеющей 19 секций, а на рис. 96, б — эквивалентная схема этой обмотки, показывающая последовательность соединения ее секций и образующиеся параллельные ветви. Цифрами 1, 2, 3 и т. д. обозначены активные проводники, лежащие в верхнем слое каждого паза, а 1′, 2′, 3′ и т. д.— в нижнем слое.
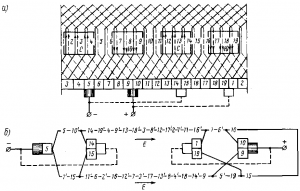 Рис. 96. Схемы простой волновой обмотки четырехполюсной машины
Рис. 96. Схемы простой волновой обмотки четырехполюсной машины
При волновой обмотке в машине можно устанавливать только два щеточных пальца. Однако это делают лишь в машинах малой мощности; в более мощных машинах обычно ставят полный комплект (2р) щеточных пальцев для уменьшения плотности тока под щетками и улучшения токосъема.
Простая петлевая обмотка.
При простой петлевой обмотке каждую секцию присоединяют к соседним коллекторным пластинам (рис. 97).
 Рис. 97. Общий вид петлевой обмотки (а) и схема соединения ее секций (б)
Рис. 97. Общий вид петлевой обмотки (а) и схема соединения ее секций (б)
В простой петлевой обмотке секции, расположенные под каждой парой полюсов, образуют две параллельные ветви, поэтому число параллельных ветвей по всей обмотке 2а равно числу полюсов 2р:
2a = 2p (56′)
Условие 2а=2р выражает основное свойство простой петлевой обмотки: чем больше число полюсов, тем больше параллельных ветвей имеет обмотка, следовательно, тем больше щеточных пальцев должно быть в машине.
На рис. 98, а приведена в качестве примера развернутая в плоскость схема простой петлевой обмотки якоря че-тырехполюсной машины, имеющей 24 секции, а на рис. 98, б — эквивалентная схема этой обмотки, показывающая последовательность соединения ее секций и образующиеся параллельные ветви (обозначение проводников и коллекторных пластин такое же, как и на рис. 96).
 Рис. 98. Схемы петлевой обмотки четырехполюсной машины (УР — уравнительные соединения)
Рис. 98. Схемы петлевой обмотки четырехполюсной машины (УР — уравнительные соединения)
Применение петлевой и волновой обмоток.
 Рис. 99. Схемы параллельных ветвей в четырехполюсной машине при петлевой (а) и волновой (б) обмотках: 1 — коллекторные пластины; 2 — секции обмотки
Рис. 99. Схемы параллельных ветвей в четырехполюсной машине при петлевой (а) и волновой (б) обмотках: 1 — коллекторные пластины; 2 — секции обмотки
Число же витков в каждой параллельной ветви при петлевой обмотке в р раз меньше, чем при волновой. Так как напряжение машины определяется числом последовательно включенных витков в каждой параллельной ветви, то в машине с петлевой обмоткой напряжение будет в р раз меньше, чем с волновой обмоткой.
Из сказанного следует, что в машинах, рассчитанных для работы при высоких напряжениях, целесообразно применять волновую обмотку. Такая обмотка имеется у большей части вспомогательных машин электровозов и электропоездов, которые рассчитаны для работы при напряжении 1500—3000 В, и у некоторых тяговых двигателей электропоездов.
В машинах, рассчитанных для работы при больших токах, целесообразно применять петлевую обмотку. Такую обмотку имеет тяговые двигатели электровозов и тепловозов, а также электровозные генераторы возбуждения, используемые при рекуперации. Машины постоянного тока небольшой мощности обычно выполняют двухполюсными. При двух полюсах петлевая и волновая обмотки не различаются.
Уравнительные соединения.
 Рис. 100. Э. д. с. индуцированные в параллельных ветвях обмотки якоря при равенстве (а) и неравенстве (б) магнитных потоков отдельных полюсов
Рис. 100. Э. д. с. индуцированные в параллельных ветвях обмотки якоря при равенстве (а) и неравенстве (б) магнитных потоков отдельных полюсов
Однако практически из-за технологических допусков в значении воздушного зазора под различными полюсами, дефектов литья в остове и других причин магнитные потоки отдельных полюсов несколько различаются, вследствие чего в параллельных ветвях действуют неодинаковые э. д. с.
Если два параллельно соединенных источника имеют неодинаковые э. д. с. (рис. 101), то по контуру, образованному двумя источниками, будет проходить некоторый дополнительный ток, обусловленный разностью э. д. с. Е1—Е2 источников.
 Рис. 101. Возникновение уравнительного тока при неравенстве э. д. с. двух источников
Рис. 101. Возникновение уравнительного тока при неравенстве э. д. с. двух источников
Этот ток носит название уравнительного. Уравнительный ток Iур циркулирует внутри источников, не совершает никакой полезной работы, а создает лишь потери электрической энергии в обоих источника. Он вызывает неравномерную нагрузку отдельных источников, перегружая источник с большей э. д. с. и разгружая источник с меньшей э. д. с.
В машинах постоянного тока при неравенстве э. д. с. в отдельных параллельных ветвях возникающие уравнительные токи будут перегружать щетки и ухудшать работу машин.
Например, при неравенстве э. д. с. Е1 и Е2 в параллельных ветвях обмотки якоря 3 (рис. 100, б) по обмотке и через щетки 1 (А — Г) будет проходить уравнительный ток Iур. Разница между э. д. с. Е1 и E2 составляет 3—5 %, но из-за небольшого сопротивления обмотки якоря этого оказывается достаточно, чтобы по параллельным ветвям проходили довольно значительные уравнительные токи, которые способствуют возникновению искрения под щетками.
Чтобы уравнительные токи замыкались помимо щеток, в петлевых обмотках предусматривают уравнительные соединения, которые соединяют точки обмотки, имеющие теоретически равные потенциалы. Такими точками являются начала и концы проводников обмотки якоря, расположенные один от другого на расстоянии, равном двойному полюсному делению 2т, Идеальным было бы соединить все такие точки обмотки. Однако большое число уравнительных соединений сильно удорожает обмотку, поэтому практически достаточно иметь одно-два уравнительных соединения на каждую группу секций, лежащих в одном пазу якоря.
С производственной точки зрения уравнительные соединения удобно присоединять к коллекторным пластинам 2 (см. рис. 100,б). Обычно они связывают каждую третью — пятую пластины коллектора (рис. 102).
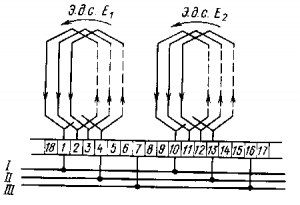 Рис. 102. Схема выполнения уравнительных соединений I, II, III в петле вой обмотке.
Рис. 102. Схема выполнения уравнительных соединений I, II, III в петле вой обмотке.
Площадь поперечного сечения проводов, которыми выполняют уравнительные соединения, в 3—5 раз меньше площади поперечного сечения проводников обмотки якоря. Уравнительные соединения располагают чаще всего под лобовыми частями обмотки якоря рядом с коллектором, в этом случае они находятся вне магнитного поля главных полюсов и в них не индуцируется э. д. с.
Сложные обмотки.
При мощности машины более 1000 кВт применяют сложные многоходовые обмотки якоря, представляющие собой несколько простых петлевых или волновых обмоток, намотанных на общий якорь, смещенных относительно друг друга и присоединенных к одному коллектору. Применение многоходовых обмоток позволяет увеличивать число параллельных ветвей при неизменном числе полюсов, увеличение которых в ряде случаев невозможно. Однако эти обмотки требуют сложных уравнительных соединений.
Одной из разновидностей сложных обмоток является параллельно-последовательная обмотка, применяемая в некоторых тяговых генераторах. Она представляет собой комбинацию простой петлевой 1 (рис. 103, а) и многоходовой волновой 2 обмоток.
 Рис. 103. Схема параллельно-последовательной обмотки (а), расположение ее проводников в пазах (б) и форма якорной катушки (в)
Рис. 103. Схема параллельно-последовательной обмотки (а), расположение ее проводников в пазах (б) и форма якорной катушки (в)
Обе обмотки уложены в одни и те же пазы и имеют общие коллекторные пластины. Для равенства э. д. с. параллельных ветвей, образуемых петлевой и волновой обмотками, число параллельных ветвей этих обмоток должно быть одинаково.
Параллельно-последовательную обмотку выполняют в четыре слоя (рис. 103,б), так как в пазы якоря закладывают две двухслойные обмотки. Эта обмотка получила название «лягушачья» из-за формы свой якорной катушки (рис. 103, в). Рассматриваемая обмотка не требует уравнительных соединений, что выгодно отличает ее от других обмоток. Возможность уменьшения напряжения, действующего между соседними коллекторными пластинами, вдвое по сравнению с простыми обмотками является важным преимуществом параллельно-последовательной обмотки.

