Что называется рабочими характеристиками асинхронного двигателя
Контрольная работа: Рабочие характеристики асинхронного двигателя
РАБОТА ПО ЭЛЕКТРОТЕХНИКЕ
«Рабочие характеристики асинхронного двигателя»
Асинхронная электрическая машина – это электрическая машина переменного тока, у которой частота вращения ротора не равна частоте вращения магнитного поля статора и зависит от нагрузки. Используется в основном как двигатель и как генератор. Статор имеет пазы, в которые укладывается одно- или многофазная (чаще трёхфазная) обмотка, подключаемая к сети переменного тока. Эта обмотка предназначена для создания подвижного магнитного поля, вращающегося кругового- у трёхфазных и пульсирующего или вращающегося эллиптического-у однофазных машин. Ротор – вращающаяся часть электрической машины, предназначен также для создания магнитного поля, которое, взаимодействуя с полем статора, ведёт к созданию электромагнитного вращающего момента, определяющего направление преобразования энергии. У генераторов этот момент носит тормозной характер, противодействуя вращающему моменту первичного двигателя, приводящего в движение ротор. У двигателей, наоборот, этот момент является движущим, преодолевающим сопротивление приводимого во вращение ротором механизма.
Асинхронный генератор-это асинхронная электрическая машина, работающая в генераторном режиме. Вспомогательный источник электрического тока небольшой мощности и тормозное устройство (в электроприводе).
Асинхронный электродвигатель – это асинхронная электрическая машина, работающая в двигательном режиме. Наиболее распространен трехфазный асинхронный электродвигатель (изобретен в 1889 М.О. Доливо-Добровольским). Асинхронные электродвигатели отличаются относительной простотой конструкции и надежностью в эксплуатации, однако имеют ограниченный диапазон частоты вращения и низкий коэффициент мощности при малых нагрузках. Мощность от долей Вт до десятков МВт.
1. Асинхронный двигатель
1.1 Частота вращения магнитного поля и ротора
Пусть n 1 – частота вращения магнитного поля. Многофазная система переменного тока создаёт вращающееся магнитное поле, частота вращения которого в минуту n1=60f1/p, где f1 – частота тока, p – число пар полюсов, образуемых каждой фазой статорной обмотки.
n 2 – частота вращения ротора. Если ротор вращается с частотой не равной частоте вращения магнитного поля (n2≠n1), то такая частота называется асинхронной. В асинхронном двигателе рабочий процесс может протекать только при асинхронной частоте.
При работе частота вращения ротора всегда меньше частоты вращения поля.
( n 2 n 2
Магнитное поле статора вращается в том же направлении, что и ротор и скользит относительно ротора с частотой n s = n 1 – n 2
Отставание ротора от вращающегося магнитного поля статорахарактеризуется скольжениемS = n s / n 1, => S = ( n 1 – n 2) / n 1
Если ротор неподвижен, тоn 2 =0, S = ( n 1 – n 2) / n 1, => S = n 1 / n 1 =1
Если ротор вращается синхронно с магнитным полем, то скольжение S= 0.
При холостом ходе, то есть при отсутствии нагрузки на валу двигателя скольжение ничтожно мало и его можно принять равным 0. Нагрузкой на валу ротора может служить, например резец токарного станка. Он создаёт тормозной момент. При равенстве вращающего и тормозного момента двигатель будет работать устойчиво. Если нагрузка на валу увеличилась, то тормозной момент станет больше вращающего и частота вращения ротора n 2 уменьшится. Согласно формулеS = ( n 1 – n 2) / n 1 скольжение увеличится. Так как магнитное поле статора скользит относительно ротора с частотой n s = n 1 – n 2, то оно будет пересекать проводники ротора чаще, в них увеличится ток и двигательный вращающий момент, который вскоре станет равным тормозному. При уменьшении нагрузки, тормозной момент становится меньше вращающего, увеличивается n 2 и уменьшаетсяS . Уменьшается Э.Д.С и ток ротора и вращающий момент вновь равен тормозному. Магнитный поток в воздушном зазоре машины при любом изменении нагрузки остаётся примерно постоянным.
2. Рабочие характеристики асинхронного двигателя
Рабочие характеристики асинхронного двигателя есть зависимость
n2 – частоты вращения ротора
М – развиваемого момента
От полезной мощности Р2 на валу машины.
Эти характеристики снимаются при естественных условиях. Частота тока f1 и напряжение U1 остаются постоянными. Изменяется только нагрузка на валу двигателя.
При увеличении нагрузки на валу двигателя S увеличивается. При холостом ходе двигателя n2≈n1, и S≈0. При номинальной нагрузке скольжение обычно составляет от 3 до 5%.
При увеличении нагрузки на валу двигателя частота вращения n2 уменьшается. Однако, изменение частоты вращения при увеличении нагрузки от 0 до номинальной очень незначительны и не превышают 5%. Поэтому, скоростная характеристика асинхронного двигателя является жёсткой. Кривая имеет очень малый наклон к горизонтальной оси.
Вращающий момент М , развиваемый двигателем, уравновешен тормозным моментом на валу Мт и моментом М , идущим на преодоление механических потерь, то есть М= Мт + М =Р 2 /Ω 2 + М , где Р 2 – полезная мощность двигателя, Ω 2 -угловая скорость ротора. При холостом ходе М= М 0. С увеличением нагрузки вращающий момент также увеличивается, причём за счёт некоторого уменьшения частоты вращения ротора увеличение вращающего момента происходит быстрее, чем полезной мощности на валу.
Ток I1, потребляемый двигателем из сети неравномерно изменяется с увеличением нагрузки на валу двигателя. При холостом ходе СОSφ-коэффициента мощности – мал. И ток имеет большую реактивную составляющую. При малых нагрузках на валу двигателя активная составляющая тока статора меньше реактивной составляющей, поэтому активная составляющая тока незначительно влияет на ток I1. При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает значительное изменение тока I1.
Графическая зависимость потребляемой двигателем мощности Р1 изображается почти прямой линией, незначительно отклоняющейся вверх при больших нагрузках, что объясняется увеличением потерь в обмотках статора и ротора с возрастанием нагрузки.
Зависимость СОSφ-коэффициента мощности – от нагрузки на валу двигателя следующая. При холостом ходе СОSφ мал, порядка 0,2. Так как активная составляющая тока статора, обусловленная потерями мощности в машине, мала по сравнению с реактивной составляющей этого тока, создающей магнитный поток. При увеличении нагрузки на валу СОSφ возрастает, достигая наибольшего значения 0,8–0,9, в результате увеличения активной составляющей тока статора. При очень больших нагрузках происходит некоторое уменьшение СОSφ, так как в следствие значительного увеличения скольжения и частоты тока в роторе возрастает реактивное сопротивление обмотки ротора.
Кривая КПДη имеет такой же вид как в любой машине или трансформаторе. При холостом ходе КПД=0. С увеличением нагрузки на валу двигателя КПД резко увеличивается, а затем уменьшается. Наибольшего значения КПД достигает при такой нагрузке, когда потери мощности в стали и механические потери, не зависящие от нагрузки, равны потери мощности в обмотках статора и ротора, зависящим от нагрузки.
РАЗДЕЛ 4. РАСЧЕТ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ
Сайт для электриков
Пример. 3-х фазный АД с КЗ ротором типа АИР180М4 получает питание от 3-х фазной сети с линейным напряжением U1 = 380 В, частотой 50 Гц. Данные номинального режима двигателя: мощность на валу Р2НОМ = 30 кВт; синхронная частота вращения n1 = 1500 об/мин; номинальное скольжение sНОМ = 2,0 %; коэффициент мощности cosϕНОМ = 0,87; коэффициент полезного действия ηНОМ = 92 %; кратности критического кM = 2,7; пускового моментов кП = 1,7; кратность пускового тока iП = 7; соединение обмоток статора — звезда.
Найти: число пар плюсов; номинальную частоту вращения ротора; номинальное фазное напряжение; номинальный фазный ток обмотки статора; номинальный момент на валу; критическое скольжение и момент двигателя; пусковой момент при номинальном напряжении и снижении его значения на 20%; пусковой ток; емкость конденсаторов для увеличения коэффициента мощности до 1 и начертить электрическую схему двигателя с включением конденсаторов.
Решение:
Асинхронный электродвигатель с короткозамкнутым ротором — это
Определяем число пар полюсов обмотки статора:
Вычисляем номинальная частота вращения ротора: об/мин.
Находим номинальное фазное напряжение: При соединении в «звезду» В.
Рассчитываем номинальный фазный ток обмотки статора: А.
Определяем номинальный момент на валу: Н⋅м.
Вычисляем критическое скольжение:
Находим критический момент: Н⋅м.
Рассчитываем пусковой момент при номинальном напряжении: Н⋅м, при пониженном напряжении: Н⋅м,
Определяем пусковой ток: А.
Вычисляем емкость конденсаторов, для повышения коэффициента мощности до 1.
Формула емкости компенсирующих конденсаторов, соединенных по схеме «звезда», имеет вид: Ф.
Формула емкости компенсирующих конденсаторов, соединенных по схеме «треугольник», имеет вид: Ф,
где f — частота питающей электросети, Гц; QK — реактивная мощность, вар; PHOM — активная мощность, Вт; U1 — линейное напряжение, В; ϕ1 и ϕ2 — соответственно углы сдвига фаз между напряжением и током до включения и после включения конденсаторной батареи, град. град; град.
Тогда, емкость конденсаторов, при соединении «в звезду» будет равна: Ф или 1124,89 мкФ.
При соединении в «треугольник», емкость конденсаторов будет в три раза меньше, чем при соединении «в звезду» и равняется: Ф или 374,96 мкФ.
В схеме соединения конденсаторов в «треугольник» емкость батареи получатся в три раза меньше, зато напряжение на конденсаторах в больше, если сравнивать со схемой соединения конденсаторов в «звезду».
Чертим схему включения конденсаторов для повышения коэффициента мощности электросети с асинхронным двигателем.

Подробно о реактивной мощности читайте здесь.
ЗАДАЧА. Решение задачи по теме «Трехфазные асинхронные двигатели c короткозамкнутым ротором»
Условие задачи. Трехфазный асинхронный двигатель с короткозамкнутым ротором питается от сети с линейным напряжением Uл. Заданы параметры двигателя: номинальная мощность Pн, частота вращения nн, коэффициент полезного действия hн, коэффициент мощности cos j1н при номинальной нагрузке, кратность максимального момента Ммах / Мн и кратность пускового тока Iп / Iн. Численные значения этих величин приводятся в табл. 2.10. Номинальное фазное напряжение обмотки статора U1ф = 220 В.
Требуется: 1) начертить схему подключения асинхронного двигателя к трехфазной сети; 2) определить способ соединения обмотки статора; 3) определить фазные и линейные токи двигателя; 4) определить число пар полюсов обмотки статора; 5) определить номинальное скольжение и номинальный момент; 6) определить критическое скольжение; 7) определить значение пускового тока;  определить значение вращающего момента, развиваемого двигателем при скольжениях: 0.05, 0.1, 0.2, 0.4, 0.6, 0.8, 1.0; 9) построить график механической характеристики n2(M) асинхронного двигателя.
определить значение вращающего момента, развиваемого двигателем при скольжениях: 0.05, 0.1, 0.2, 0.4, 0.6, 0.8, 1.0; 9) построить график механической характеристики n2(M) асинхронного двигателя.
Методические указания. В схеме подключения двигателя к трехфазной сети все элементы цепи необходимо обозначить по государственным стандартам.
Способ соединения обмотки статора асинхронного двигателя определяется величиной линейного напряжения сети. При напряжении в сети 380 В обмотка соединяется по схеме в звезду, а при напряжении 220 В соединяется по схеме в треугольник.
В асинхронном двигателе полезная мощность получается преобразованием активной мощности, потребляемой из сети, а значение этой мощности можно записать в виде
P1= 3 UФ Iф cоs j1,
где P1 – активная мощность, потребляемая двигателем из сети, Вт; UФ – фазное напряжение, В; Iф – фазный ток обмотки статора, А; cоs j1 – коэффициент мощности асинхронного двигателя.
Из этого выражения можно определить фазные и линейные токи двигателя.
Активная мощность асинхронного двигателя определяется из выражения коэффициента полезного действия
где h – коэффициент полезного действия асинхронного двигателя, %; Р2 = Рн – полезная мощность двигателя, Вт.
При работе асинхронного двигателя частота вращения ротора меньше частоты вращения поля статора и оценивается эта разность скольжением
где S – скольжение асинхронного двигателя, о. е.; n2 – частота вращения ротора, об/мин; n1 – частота вращения поля статора, определяется по формуле
где ¦ – частота питающего напряжения, Гц; p – число пар полюсов обмотки статора асинхронного двигателя.
В результате преобразования электрической энергии в механическую на валу асинхронного двигателя возникает полезный момент
где М2 – полезный момент на валу двигателя, Нм.
Вращающий момент в асинхронном двигателе зависит от скольжения и определяется по формуле Клосса выражением
где М мах – максимальный момент, Нм; Sкр – критическое скольжение, которое соответствует максимальному моменту.
Отношение максимального момента двигателя Ммах к номинальному Мн называется кратностью максимального момента
Из формулы Клосса по номинальным значениям момента двигателя и скольжения определяем критическое скольжение.
На основе формулы Клосса при различных значениях скольжения можно определить вращающий момент и построить механические характеристики n2(M) асинхронного двигателя.
Пример. Трехфазный асинхронный двигатель питается от сети с линейным напряжением Uл = 220 В. Заданы параметры двигателя: номинальная мощность Рн = 1.5 кВт; частота вращения nн = 1425 об/мин; коэффициент полезного действия hн = 81.5 %; коэффициент мощности при номинальной нагрузке cоs j1н = 0.85; кратность максимального момента Mмах / Mн = 1.8; кратность пускового тока Iп / Iн = 6.5. Номинальное фазное напряжение обмотки статора Uф = 220 В.
Требуется определить: 1) способ включения обмотки статора; 2) фазные и линейные токи двигателя; 3) число пар полюсов; 4) номинальное скольжение и номинальный момент; 5) критическое скольжение; 6) значение пускового тока; 7) значения вращающего момента при скольжениях 0.03, 0.15, 0.25, 0.5, 0.75, 0.9. 1.0; построить график механической характеристики n (M) асинхронного двигателя.
Решение. Обмотка статора асинхронного двигателя должна быть соединена по схеме в треугольник, так как линейное напряжение сети и фазное напряжение обмотки равны.
Активная мощность, потребляемая двигателем из сети, определяется формулой
Р1 = 100 = 1.84 кВт.
Ток в фазе обмотки статора асинхронного двигателя
Линейный ток, потребляемый двигателем из сети, при соединении обмотки в треугольник определяется соотношением
Iл =Iф =× 3.28 = 5.68 А.
При заданной частоте вращения двигателя 1425 об/мин частота вращения поля составляет 1500 об/мин, а число пар полюсов определяется формулой
Номинальное скольжение двигателя
Полезный момент на валу двигателя при номинальной нагрузке определяется выражением
Мн = 9.55 = 10.05 Нм.
Критическое скольжение определяем из формулы Клосса для номинального режима работы.
Sкр = Sн (Кмах + ) = 0.05 (1.8 + ) = 0.165.
Определяем максимальный момент при заданной кратности
Ммах = Кмах Мн = 1.8 × 10.05 = 18.1 Нм
Вращающий момент асинхронного двигателя при скольжении S = 0.03 определяется на основании формулы Клосса
а частота вращения ротора при этом скольжении
n2 = n1 (1 – s) = 1500 (1 – 0.03) = 1455 об/мин.
Вращающие моменты и обороты двигателя для других заданных скольжений определяются аналогичным образом, а результаты расчета сведены в табл. 2.11.
Вращающий момент и частота вращения двигателя
| S, o.e. | 0.03 | 0.05 | 0.15 | 0.165 | 0.25 | 0. 5 | 0.75 | 0.9 | 1.0 |
| n2, об/мин | 1455 | 1425 | 1275 | 1252 | 1125 | 750 | 375 | 150 | |
| М, Нм | 6.37 | 10.05 | 17.32 | 18.1 | 16.64 | 10.77 | 7.6 | 6.42 | 5.81 |
По результатам, представленным в табл. 2.11, строим (рис. 2.11) график механической характеристики асинхронного двигателя n2 =¦(M).
Рис. 2.11. Механическая характеристика двигателя
Линейный и фазный токи при пуске двигателя определяем из заданного соотношения этих токов к номинальному
Iп = 6.5 Iл = 6.5 × 5.68 = 36.92 А ; Iп = 6.5 Iф = 6.5 × 3.28 = 21.32 А .
Вывод. При соединении обмотки статора асинхронного двигателя по схеме в треугольник при номинальном токе 3.28 А в режиме пуска линейный ток возрастает до 36.92 А, а фазный ток – до 21.32 А .
Режимы работы асинхронных машин
Направление вращения асинхронного электродвигателя при прямом порядке чередования фаз (а
—
b
—
с
) принимаем за положительное (первый квадрант), а при обратном порядке чередования фаз (
a
—
c
—
b
) — за отрицательное (третий квадрант). Во втором и четвертом квадрантах представлены характеристики тормозных режимов.
Что такое асинхронный двигатель и принцип его действия
Данный двигатель зачастую используется в промышленности. Он простой в использовании, долговечный, недорогой.

Асинхронный двигатель превращает электрическую энергию в механическую. Его работа основана на принципе вращающегося магнитного поля. Сам принцип действия аппарата можно описать несколькими пунктами поэтапно:
- Во время запуска самого двигателя происходит пересечение магнитного поля с контуром ротора, после чего происходит индицирование электродвижущей силы.
- В замкнутом роторе происходит возникновение переменного тока.
- Магнитные поля: статора и ротора также воссоздают непосредственно так называемый крутящий момент.
- Ротор «догоняет» поле самого статора.
- Когда частоты вращения самого магнитного поля статора/ротора имеют совпадения, электромагнитные процессы, образованные в месте ротора затухают. После чего крутящий момент приравнивается к «0».
- Статор, а вернее его образованное магнитное поле возбуждает контур ротора, который в этот момент вновь позади.
Где применяются?
Как уже уточнялось выше в статье, применяется данный двигатель промышленности (лебедки общепромышленного назначения, краны) и бытовой технике (асинхронные двигатели с небольшой мощностью).
Теперь остановим ваше внимание на электродвигателе непосредственно с короткозамкнутым ротором. Они применяются в самих электроприводах различных типов станков, а если говорить точнее: металлообрабатывающих, а также часто встречающихся на сегодня грузоподъемных и ткацких, в том числе деревообрабатывающих), а также в вентиляторах, лифтах, различных насосах, бытовых приборах.
Если говорить об асинхронном электродвигателе с короткозамкнутым ротором, то благодаря его применению можно добиться существенного снижения энергопотребления оборудования, которое в свою очередь, обеспечивает высокий уровень надежности аппарата. Данные характеристики оказывают положительный эффект на модернизацию производства в целом.
Что такое «скольжение»?
Пришло время поговорить о таком понятии как «скольжение» асинхронного двигателя.
Это, по сути, относительная разность скоростей самого вращения «ротора», это ни что иное, как изменение, так называемого переменного магнитного тока. «Скольжение» измеряется в относительных единицах, а также можно измерять в процентном соотношении.
Устройство асинхронного двигателя
Основные части двигателя: статор и ротор. Три обмотки находятся на полюсах железного сердечника кольцевой формы, сети так называемого трехфазного тока 0 располагаются одна относительно другой строго под углом 120 градусов.
Также отметим, что внутри самого сердечника закреплен на той же оси цилиндр из высококачественного металла. Он называется – ротор.
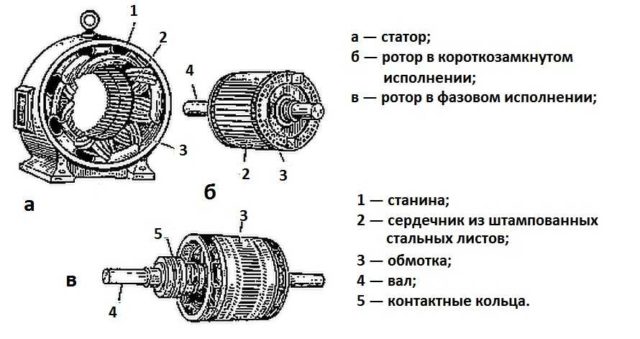
Статор
Статор это неподвижная часть, которая формирует вращающееся магнитное поле. Именно это поле непосредственно соприкасается с электромагнитным полем самой подвижной части, именуемой ротором, тем самым происходит полноценное вращение ротора.
Двигатели статора имеют фазные и короткозамкнутые роторы.
Устройство статора
- Первое это корпус, изготовленный из чугуна, но часто встречаются корпуса из алюминия.
- Далее идет сердечник из пластин, которые изготовлены из электротехнической стали в толщину 0,5 миллиметров. Пластины сердечника скреплены скобками или же швами, покрыты изоляционным лаком, закреплены в станине при помощи стопорных болтов.
- Ну и последнее в устройстве статора– обмотки, сдвинутые друг к другу на 120 градусов, как правило, в устройстве их не более трех, они вложены в пазы на внутренней стороне самого сердечника, изготовлены из изолированного медного, алюминиевого провода круглого/квадратного сечения.
Сердечник статора
Выполняется с посадкой на вал, без наличия промежуточной втулки. Посадка сердечников используется в двигателях с высотой непосредственно оси в 250 миллиметров без шпонки.
В больших двигателях сердечники закреплены на вал с применением шпонки. В случае, если ротор в диаметре 990 миллиметров, сердечник шихтуют из разных сегментов.
Обмотка статора и количество оборотов электродвигателя
Определить количество оборотов электродвигателя можно лишь при помощи обмотки. В этом нет ничего сложного и достаточно просто следовать инструкции и все получится. Для этого нужно:
- Снять крышку с двигателя.
- Найти одну из секций и посмотреть, сколько места она занимает по окружности самого круга. Например, если катушка заняла половину круга – это 180 градусов, то двигатель идет на 3000 оборотов в минуту.
- Если в окружности вмещается три секции на 120 градусов, то это двигатель на 1500 оборотов в минуту.
- Если в катушке вмещается 4 секции на 90 градусов, то двигатель на 3000 оборотов в минуту.
Ротор
Вращается внутри самого статора (выше описывали, что он представляет собой). Ротор – элемент электрического двигателя. Его вал соединен с деталями агрегаторов. Если говорить о массивном роторе – это цельный стальной цилиндр, который помещается во внутрь статора с не присоединенным к его поверхности сердечником (также выше описывали что такое сердечник).
Также бывают еще разновидности ротора:
- фазный (уложен в пазы сердечника обмоткой и соединен по схеме «звезда»),
- короткозамкнутый (залитый в поверхность сердечника, замкнут с торцов при помощи двух высокопроводящих медных колец).
Устройство короткозамкнутого ротора
Такая обмотка зачастую называется у профессионалов «беличьим колесом» по причине того, что его внешняя конструкция достаточно схожа с ним. Состоит из аллюминевых стержней, торцов с двумя кольцами замкнутых накоротко. Такие стержни вставлены, как правило, в пазы сердечника самого ротора.
Как сделан фазный ротор
Фазный ротор представляет собой двигатель, который поддается регулировке при помощи добавления в цепь ротора так называемых добавочных сопротивлений. Используются такого плана двигатели во время пуска с нагрузкой на валу. В свою очередь, увеличение сопротивления в цепи ротора предоставляет возможность увеличить пусковой момент.
Что лучше короткозамкнутый или фазный: совместная работа ротора и статора
Здесь стоит отметить, что особенных преимуществ нет ни у одного ротора, каждый хорош по-своему. Более подробно на них останавливаться не будем, так как вся необходимая информация по этим двум разновидностям ротора уже была дана выше в статье. остановим внимание на том, как регулируется частота вращения ротора. Это можно сделать при помощи изменения так называемого дополнительного сопротивления самой цепи ротора.
Также можно регулировать частоту вращения ротора, изменив напряжение статора, который подведен к обмотке.
Можно также изменить частоту питающего напряжения или же переключить число пар полюсов, ввести резисторы в цепь ротора.
Классификация по типу ротора
Классификация по типу ротора следующая: однофазный асинхронный двигатель с короткозамкнутым ротором, а также есть такая разновидность ротора, как двухфазный асинхронный двигатель короткозамкнутый.
Плюс ко всему сегодня часто пользуется спросом и асинхронный двигатель с короткозамкнутым ротором с тремя фазами, а также асинхронный двигатель с фазным ротором, также с тремя фазами. Именно так и делится классификация ротора по числу фаз.
Линейные моторы
В линейных двигателях перемещение рабочего органа РО (коротких подач) происходит от самого двигателя через ременную передачу строго на винт (ходовой).
Шариковая гайка скреплена с короткой передачей пружинных механизмов защиты от соударений, именно через нее происходит вращение винта и происходит трансформация в продольное перемещение РО.
Подключение двигателя к питанию
Кнопки “Стоп” должны быть подключены в последовательности друг с другом, а в свою очередь кнопки “Пуск” должны строго настрого быть подключены в параллели между собой в цепи управления.
Во время нажатия на “Пуск” цепь катушки будет замкнута, а сама катушка начинает втягиваться, а во время размыкания кнопки, напряжение питающее катушку, пойдет через блок-контакт КМ. Прервать цепь управления можно при помощи нажатия на одну из кнопок “Стоп”.
Достоинства и недостатки асинхронных двигателей
Достоинства:
- прежде всего, их легко использовать и никаких сложностей при эксплуатации не возникает
- конструкция двигателей очень простая и это еще одно их преимущество, а также нельзя не отметить их низкую себестоимость (порой это имеет большое значение для покупателей, так что это еще один плюс таких двигателей)
- надежность
Недостатки:
- модели оснащены маленьким пусковым механизмом
- выдают высокой спусковой ток
- очень сильно чувствительны к возможной смене параметров в сети
- для плавного регулирования скорости нужен преобразователь вероятных частот
Несмотря на то, что есть свои недостатки эти асинхронные двигатели, пользуются огромной популярностью. Так что все-таки они заслуживают должного уважения и не зря их часто используют в промышленности.
Рабочие характеристики асинхронного двигателя
Рабочие характеристики асинхронного двигателя — раздел Приборостроение, Трехфазный двигатель с короткозамкнутым ротором и соединением Рабочие Характеристики Асинхронного Двигателя Представляют Собой Зависимость .
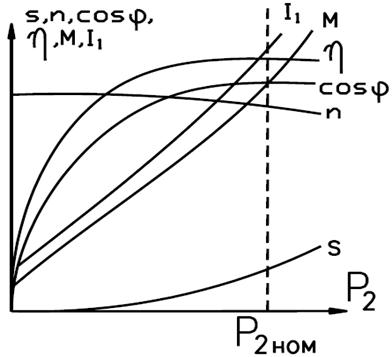
Рабочие характеристики асинхронного двигателя представляют собой зависимость скорости вращения n2, коэффициента полезного действия η, коэффициента мощности cosφ, скольжения s, вращающего момента M и тока в цепи статора I1от нагрузки (полезной мощности) на валу двигателя P2 при постоянном номинальном напряжении и неизменной частоте сети (рис. 3.).
Основной характеристикой двигателя является зависимость частоты вращения ротора от момента сопротивления на валу (от нагрузки), т.е. механическая характеристика. Рабочими характеристиками двигателя являются зависимости:
При построении рабочих характеристик используются соотношения:
где: Р2 — полезная механическая мощность на валу;
Р1 — мощность, потребляемая из сети;
I1 — линейный ток, потребляемый двигателем из сети;
М — момент на валу;
Сosj1 — коэффициент мощности двигателя;
h — КПД двигателя;
U1 — линейное напряжение сети.
У асинхронного двигателя, как и у большинства машин, коэффициент полезного действия (КПД) с ростом нагрузки возрастает η=ƒ(Р2), ввиду уменьшения доли электрических и магнитных потерь по отношению к развиваемой мощности двигателя. Однако, при достижении нагрузки 75% от номинальной, заметно возрастают и электрические потери (в обмотках статора и ротора), пропорциональные квадрату тока потребляемого двигателем, что ведет в дальнейшем с увеличением нагрузки к некоторому уменьшению КПД.
Коэффициент мощности cosφ зависит от соотношения между активной мощностью Р1, потребляемой двигателем, и полной мощностью S, складывающейся из активной Р1 и реактивной Q составляющих:
cosφ =  (6)
(6)
При увеличении нагрузки растет величина активной мощности Р1, что приводит к росту cosφ, достигающего максимального значения (0,7-0,9) при номинальной нагрузке на двигатель. В дальнейшем возможно уменьшение cosφ, в связи с увеличением реактивной мощности, связанной с усилением потоков рассеяния.
Механическая характеристика и саморегулирование двигателя.
График, связывающий между собой механические величины — скорость и вращающий момент, называется механической характеристикой асинхронного двигателя (рис. 4.) n=ƒ(M). Саморегулирование асинхронного двигателя заключается в следующем. Пусть двигатель работает устойчиво в каком-то режиме, развивая скорость n1 и вращающий момент М1. При равномерном вращении этот момент равен тормозному моменту Мт1, т.е.

Увеличение тормозного момента до Мт2, вызовет уменьшение оборотов машины, так как тормозной момент станет больше вращающего момента.
С уменьшением оборотов увеличивается скольжение, что в свою очередь вызывает возрастание ЭДС и тока в роторе. Благодаря этому увеличивается вращающий момент двигателя.
Этот процесс заканчивается тогда, когда вращающий момент М2, развиваемый двигателем, станет равным Мт2. При этом, устанавливается скорость вращения меньшая, чем n1. Свойство автоматического установления равновесия между тормозным и вращающим моментами называется саморегулированием.
Момент сопротивления (тормозящий момент) на валу двигателя создается генератором постоянного тока (ГПТ).
При питании ОВ генератора от постоянного источника возникает ток возбуждения IВ, создающий основное магнитное поле машины Ф.
Чаще всего используют два способа включения ОВ — к независимому источнику питания (независимое возбуждение) и параллельно цепи якоря генератора (параллельное возбуждение).
Вал якоря ГПТ, будучи соединенным с валом асинхронного двигателя, приводится им во вращение, в результате чего индуцируется в обмотках якоря ЭДС Е, а на выходе генератора появляется напряжение U, питающее нагрузку генератора, ток цепи якоря Iя взаимодействует с магнитным полем возбуждения Ф и создает тормозящий моментМ:
где: СМ — конструктивный коэффициент машины.
Величина тормозящего момента зависит от величины нагрузки генератора и, следовательно, от IЯ и от тока возбуждения IВ, создающего магнитный поток Ф.
Основные характеристики генератора:
а) характеристика холостого хода: Е = f6(IВ);
б) внешняя характеристика: U = f7(I);
где: I — ток в нагрузке генератора.