В чем преимущество контактного двигателя
Двигатели переменного тока и постоянного тока: в чем разница?
Без рубрики
Электродвигатели — это машины, предназначенные для преобразования электрической энергии в механическую. Хотя они доступны во многих вариантах, их можно разделить на две основные категории: двигатели переменного тока и двигатели постоянного тока.
И двигатели переменного тока, и двигатели постоянного тока имеют одинаковую функцию; то есть преобразовывать электрическую энергию в механическую. Однако при выборе двигателя важно знать разницу между двигателями переменного и постоянного тока, поскольку каждый из них имеет разные требования к конструкции, питанию и управлению. В следующей статье обсуждаются различия между двумя типами двигателей, включая основные конструктивные и рабочие характеристики, преимущества и области применения. Купить электрический двигатель можно на сайте https://psnab.ru
Обзор двигателей переменного тока
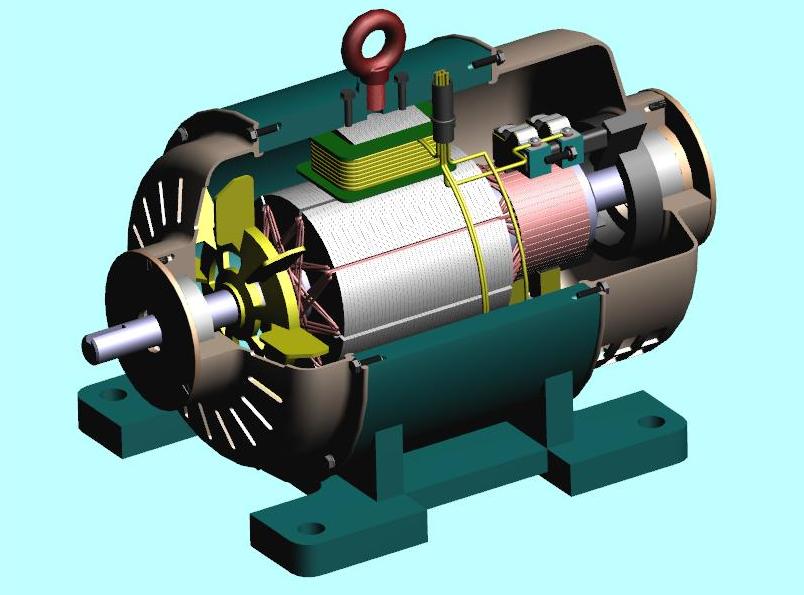
Как следует из названия, двигатели переменного тока используют переменный ток (AC) для выработки механической энергии. Стандартная конструкция состоит из статора с обмоткой, встроенной по окружности, и свободно вращающейся металлической части (т. е. ротора) в центре.
Когда ток подается на обмотки статора в двигателе переменного тока, создается вращающееся магнитное поле. Это магнитное поле индуцирует электрический ток внутри электропроводного ротора и, следовательно, образует второе вращающееся магнитное поле. Взаимодействие между первым магнитным полем и вторым магнитным полем заставляет вращаться ротор.
При выборе электродвигателя переменного тока для применения необходимо учитывать два критических фактора:
- Рабочая скорость (в оборотах в минуту): максимальная скорость, которую может достичь двигатель, рассчитывается по следующей формуле: (60 x частота сети переменного тока в Гц) ÷ количество полюсов двигателя
- Пусковой крутящий момент, создаваемый двигателем при запуске с нулевой скоростью.
Обзор двигателей постоянного тока
Двигатели постоянного тока используют постоянный ток (DC) с постоянным напряжением для выработки механической энергии. Двигатели постоянного тока состоят из вращающейся обмотки якоря (т. е. Ротора) и статора возбуждения с обмотками, которые образуют набор неподвижных электромагнитов. Другой ключевой компонент двигателя постоянного тока — это коммутатор, прикрепленный к якорю.
Когда ток течет через двигатель постоянного тока, внутри статора возбуждения и вокруг обмотки якоря создается магнитное поле. Взаимодействие между этими двумя магнитными полями создает электромагнитную силу, которая заставляет якорь вращаться. Коммутатор изменяет направление тока в якорь и тем самым позволяет ему продолжать вращение, пока ток течет через систему.
Двигатели постоянного тока могут использоваться для создания различных уровней скорости и крутящего момента. Регулировка уровней напряжения, подаваемого на якорь, или статического тока возбуждения изменяет выходную скорость.
Преимущества двигателей переменного тока перед двигателями постоянного тока
И двигатели переменного тока, и двигатели постоянного тока демонстрируют уникальные преимущества, которые делают их пригодными для различных применений. Ниже мы описываем преимущества, предлагаемые обоими типами двигателей.
К преимуществам двигателей переменного тока можно отнести:
- Более низкие требования к пусковой мощности
- Лучший контроль над начальным уровнем тока и ускорением
- Более широкие возможности настройки для различных требований к конфигурации и изменения требований к скорости и крутящему моменту
- Повышенная прочность и долговечность
К преимуществам двигателей постоянного тока можно отнести:
- Более простые требования к установке и обслуживанию
- Более высокая пусковая мощность и крутящий момент
- Более быстрое время отклика на пуск / остановку и ускорение
- Более широкий выбор для различных требований к напряжению
Применение двигателей переменного тока по сравнению с двигателями постоянного тока
Как указано выше, двигатели переменного тока и двигатели постоянного тока подходят для различных применений. В промышленном секторе долговечность, гибкость и эффективность двигателей переменного тока делают их идеальными для использования в приложениях для широкого спектра устройств, включая бытовые приборы, компрессоры, конвейеры, вентиляторы и другое оборудование HVAC, насосы и транспортное оборудование. Более быстрое время отклика и более стабильные уровни крутящего момента и скорости, предлагаемые двигателями постоянного тока, делают их хорошо подходящими для использования в производственном и производственном оборудовании, лифтах, пылесосах и подъемно-транспортном оборудовании.
И двигатели переменного тока, и двигатели постоянного тока играют критически важную роль в производстве электроэнергии в широком спектре промышленных, коммерческих и жилых помещений. Поскольку оба типа двигателей обладают преимуществами и недостатками, важно понимать разницу между ними, чтобы выбрать подходящий для своего предприятия.
Сравнение различных типов электродвигателей (в чем разница), характеристики, достоинства и недостатки, особенности их использования

Конструктивные возможности электрических двигателей обеспечивают выполнение различных требований — по мощности, механическим характеристикам, внешним условиям работы. Это позволяет электропромышленности выпускать специализированные серии двигателей, предназначенные для определенных отраслей промышленности, наиболее полно соответствующие режиму работы данных рабочих машин.

Подбор электродвигателя начинается с выбора типа двигателя, соответствующего по механическим характеристикам режиму работы приводимого механизма, с учетом экономических характеристик разных типов: стоимости, к. п. д., cos фи.
Электропромышленность выпускает следующие типы электродвигателей:
Асинхронные трехфазные электродвигатели с короткозамкнутым ротором
Из всех типов электрических двигателей это наиболее простые по конструкции, надежные механически, простые в эксплуатации и управлении, самые дешевые. Механическая характеристика «жесткая»: обороты мало изменяются при всех значениях нагрузки. Большой пусковой ток (в 5 — 7 раз больше номинального). Регулировать обороты трудно, и раньше это почти никогда не делалось.
Выпускаются многоскоростные электродвигатели, которые применяются в приводах станков и различных агрегатов, не имеющих специальных устройств для изменения числа оборотов. Выпускаются они с короткозамкнутым ротором, двух, трех и четырехскоростные, с переключением числа полюсов обмотки статора.

Принципиальный недостаток асинхронных электродвигателей — коэффициент мощности (cos фи) всегда заметно меньше единицы, особенно при недогрузках.
В настоящее время проблемы связанные с большим пусковым током асинхронных трехфазных электродвигателей решаются с помощью устройств плавного пуска (софт-стартеров), а проблемы регулирования оборотов решаются подключением электродвигателей через частотные преобразователи.
Преимущества асинхронных электродвигателей, обеспечившие такое широкое и повсеместное их применение, следующие:
высокие экономические показатели. К. п. д. электрических двигателей массового применения находится в пределах 0,8-7-0,9, у крупных машин — до 0,95 и выше;
простота конструкции, механическая надежность, легкость управления;
возможность выпуска на любые практически необходимые мощности;
легкая применяемость конструктивных форм двигателя к условиям работы: при повышенной температуре, при наружной установке и воздействии разных климатических факторов, при наличии пыли или повышенной влажности, во взрывоопасных условиях и пр.
несложность автоматического управления, как единичной рабочей машиной, так и группой их, связанных одним производственным процессом.
Асинхронные трехфазные электродвигатели с контактными кольцами и реостатным пуском
По сравнению с короткозамкнутыми — большая сложность управлений и большая стоимость. Остальные характеристики те же, что и у асинхронных трехфазных электродвигателей с короткозамкнутым ротором.
Асинхронные однофазные электродвигатели
По сравнению с трехфазными — меньший к. п. д., более низкий cos фи. Выпускаются только в малых единичных мощностях.
Синхронные двигатели
Конструктивно сложнее и дороже, чем асинхронные; сложнее управление. К. п. д. заметно выше, чем у асинхронных. Обороты зависят только от частоты тока и при постоянной частоте строго неизменны при всех нагрузках. Регулирование оборотов не применяется. Основное преимущество — возможность работы при cos фи = 1 и в емкостном режиме. Выпускаются и применяются в основном в единичных мощностях больше 100 кВт.
Коллекторные двигатели переменного тока
Основное достоинство — хорошая регулировка оборотов. Конструктивно сложны. Наличие коллектора и щеток влияет на надежность работы электродвигателя и требует их специального обслуживания.
Двигатели постоянного тока, последовательного, параллельного и смешанного возбуждения
Конструктивно намного сложнее и значительно дороже, чем асинхронные. У них сложнее управление, требуют постоянного эксплуатационного присмотра. Основное достоинство — легкая возможность плавной и в достаточно широких пределах регулировки оборотов.
Механическая характеристика сериесных двигателей «мягкая»: обороты весьма чувствительно изменяются с нагрузкой, обороты шунтового двигателя при колебаниях нагрузки изменяются мало.
Общий недостаток двигателей постоянного тока — необходимость в дополнительных устройствах для получения постоянного тока (магнитных усилителей, тиристорных регуляторов напряжения и т.п.).
Электродвигатели автоматических систем управления: шаговые двигатели и сервоприводы.
В пределах выбранного типа подбирается двигатель на необходимую скорость вращения и необходимую мощность.
Правильный выбор двигателя по мощности имеет очень большее значение, заметно сказываясь на экономических показателях работы и производительности рабочих машин.
Результатом завышения установленной мощности двигателей будет работа с пониженными значениями к. п. д., а для асинхронных двигателей переменного тока и с пониженными значениями cos фи кроме того, будут завышены капиталовложения на электрооборудование.

Занижение мощности неизбежно приведет к тому, что двигатель будет перегреваться и быстро выйдет из строя.
Чем больше нагрузка двигателя, тем больше и количество выделяемого в машине тепла, а значит тем выше будет та температура, на уровне которой установится тепловое равновесие.
В конструкции электрических машин элементом, наиболее чувствительным к температуре, определяющим нагрузочную способность машины, является изоляция обмоток.
Все потери энергии в двигателе — в его обмотках («потери в меди»), в магнитопроводах («потери в стали»), на трение вращающихся частей о воздух и в подшипниках, на вентиляцию («механические потери») превращаются в тепло.
По действующим нормам температура нагрева изоляционных материалов, обычно применяемых для обмоток электрических машин (изоляционные материалы класса А), не должна превышать 95°С. При этой температуре двигатель может надежно работать примерно 20 лет.
Всякое повышение температуры сверх 95°С ведет к ускоренному износу изоляции. Так, при температуре 110°С срок службы снизится до 5 лет, при температуре 145°С (которая может быть достигнута повышением силы тока по сравнению с номинальной, всего на 25%) изоляция будет разрушена за 1,5 месяца, а при температуре 225°С (что соответствует увеличению силы тока на 50%) изоляция обмотки придет в негодность в течение 3 часов.
Выбор двигателя по мощности производится в зависимости от характера нагрузки, создаваемой приводимым механизмом. Если нагрузка равномерна, что бывает в приводе насосов, вентиляторов, двигатель берется с номинальной мощностью, равной нагрузочной.
Однако гораздо чаще график нагрузки двигателя неравномерен: повышения нагрузки чередуются с провалами, вплоть до холостого хода. В этих случаях двигатель выбирается с номинальной мощностью, меньшей максимума нагрузки, так как в периоды уменьшенных нагрузок (или остановок) двигатель будет охлаждаться.
Разработаны методы выбора мощности двигателя в соответствии с графиком его нагрузки, т. е. с режимом работы приводимого механизма. Они изложены в специальных руководствах.
Асинхронный электродвигатель — преимущества и недостатки
Основными потребителями мировой электроэнергии (более 60% — 65%) являются электромеханические системы — электроприводы, работающие в различных промышленных, транспортных и бытовых механизмах и агрегатах. Асинхронный двигатель является наиболее широко применяемым среди всех типов электродвигателей. Двигатели специальной конструкции, построенные на базе асинхронного двигателя, характеризуются техническими параметрами, влияющими на их рабочие характеристики и адаптирующими их к различным требованиям и назначениям. Среди асинхронных двигателей специальной конструкции можно выделить следующие: многоскоростные двигатели — частота вращения двигателя изменяется изменением количества пар полюсов вращающегося магнитного поля; двигатели с короткозамкнутым ротором с повышенным пусковым моментом — используются для привода устройств с большим моментом инерции; моторы крановые — адаптированы к различным видам работ, используются для привода кранов и других подъемных устройств; двигатели с тормозом — используются в приводах, требующих быстрой остановки после рабочего цикла или после аварийного отключения питания; двигатели с повышенным скольжением — используются для привода механизмов с большой инерционностью, а также механизмов, работающих в повторно-кратковременном режиме; взрывозащищенные двигатели и т.д.
В бытовых электроприборах применяются однофазные электродвигатели с рабочим напряжением 220 вольт. Очень часто таким двигателем является однофазный асинхронный двигатель с короткозамкнутым ротором.
Преимущества асинхронных электродвигателей
- Самым главным преимуществом асинхронного двигателя является то, что его конструкция довольно проста. По сравнению с электродвигателем постоянного тока, асинхронный электродвигатель не имеет щеток и поэтому требует минимального технического обслуживания. Не требуется замена щеток, и нет угольной пыли от этих самых щеток, которая быстро засоряет электродвигатель. По этой же причине стоимость двигателя довольно низкая.
- Подключение. Благодаря тому, что в стандартной трехфазной системе питания фазы сдвинуты на 120°, для формирования вращающегося поля не требуются дополнительные элементы и преобразования. Вращение поля внутри статора и, как следствие, вращение ротора обусловлены самой конструкцией асинхронного двигателя. Необходимо обеспечить подачу напряжения через коммутационный аппарат (контактор или пускатель), и двигатель будет функционировать.
- Работа двигателя не сильно зависит от состояния окружающей среды. Но и для экстремальных условий выпускается большое количество специализированных модификаций асинхронных электродвигателей.
- В двигателе нет искр из-за отсутствия щеток.
- Асинхронный двигатель — это высокоэффективная машина с КПД при полной нагрузке от 85 до 97 процентов.
Недостатки асинхронных двигателей
- Регулировать скорость асинхронного двигателя очень сложно. Это связано с тем, что трехфазный асинхронный двигатель является двигателем с постоянной скоростью и для всего диапазона нагрузок изменение скорости двигателя очень мало. Существуют различные типы устройств, позволяющих регулировать скорость мотора, которые не только расширяют диапазон применения двигателя, но и экономят электроэнергию. Типичными примерами экономии энергии за счет замены нерегулируемых приводов на регулируемые являются такие механизмы, как: насосы — 25%, вентиляторы — 30%, компрессоры — 40% и центрифуги — 50%.
- Во время прямого пуска, который заключается в подаче на двигатель номинального напряжения номинальной частоты, возникают неблагоприятные условия, такие как высокое потребление тока и низкий пусковой момент.
- Высокая инерция ротора — двигатель может не справиться с началом вращения тяжелых приводных агрегатов.
На данный момент существует множество механических и электронных устройств, повышающих эффективность электромоторов и позволяющих максимально нивелировать недостатки асинхронных электродвигателей.
Двигатель внутреннего сгорания: виды, принцип действия, преимущества и недостатки
| Автор: AutoLubitel | Просмотров: 8904 |
Двигатель внутреннего сгорания (ДВС) – автомобильный механизм, работа которого зависит от преобразования одного вида энергии (в частности, химической реакции от сгорания топлива) в другой вид (механическую энергию для запуска автомобиля).

В качестве достоинств двигателя внутреннего сгорания, которые определяют его широчайшее использование, отмечают: автономность, относительно невысокая стоимость, возможность использования на различных потребителях, многотопливность (двс могут работать на бензине, дизельном топливе, газе и даже на спирте и рапсовом масле). Так же к достоинствам можно отнести достаточно высокую надежность ДВС и неприхотливость в работе, простоту обслуживания.
При этом двигатели внутреннего сгорания обладают рядом недостатков: низкий коэффициент полезного действия, токсичность, шумность.
Однако по сочетанию своих достоинств и недостатков на сегодняшний день в транспортной сфере (в качестве автомобильных двигателей) серьезных конкурентов у двигателей внутреннего сгорания нет, и в ближайшее время не предвидится.
ДВС могут разделяться по нескольким категориям
По типу преобразования энергии:
- турбинные;
- поршневые;
- реактивные;
- комбинированные
По типу рабочего цикла:
- с 2-мя тактами цикла;
- с 4-мя тактами цикла
По типу топлива, которое используется:
- на бензине;
- на дизеле;
- на газе
Устройство ДВС
ДВС имеет достаточно сложное устройство, которое может быть оснащено:
- корпусом (блоком и головкой цилиндров);
- рабочими механизмами (кривошипно-шатунным и газораспределительным);
- различными системами (топливной, впускной, выпускной, смазки, зажигания, охлаждения и управления).
КШМ (кривошипно-шатунный механизм) обеспечивает движение возвратно-поступательного характера поршня и обратное вращательное движение вала.
Газораспределительный механизм предназначен для подачи топлива и воздуха в цилиндры, для вывода отработанной газовой смеси.
Топливная система предназначена для обеспечения автомобильного двигателя топливом.
Система впуска отвечает за своевременную подачу воздуха в ДВС, а система выпуска – за вывод отработанных газов, уменьшения уровня шума от работы цилиндров, а также снижения их токсичности.
Система впрыска обеспечивает доставку ТПС в двигатель ВС.
Система розжига (зажигания) выполняет функцию розжига смеси воздуха и топлива, которая поступает в ДВС.
Система смазки обеспечивает своевременную смазку всех внутренних частей и деталей двигателя.
Система охлаждения обеспечивает интенсивное охлаждение рабочей системы ДВС во время работы.
Система управления отвечает за контроль над слаженной работой всех важных систем ДВС.
Принцип работы ДВС
Двигатель работает на тепловой энергии газов, образующихся при сгорании используемого топлива, что в свою очередь запускает поршневое движение в цилиндре. ДВС работает циклически. Для того чтобы повторялся каждый последующий цикл, отработанная смесь удаляется, а в поршень поступает новая часть топлива и воздуха.
В современных моделях автомобилей используются двигатели, работающие на 4-х тактах. Работа такого двигателя основана на четырех равных по времени частях. Такт – это процесс, который осуществляется в цилиндре автомобильного двигателя за один рабочий ход (поднятие/опускание) поршня.
Поршень в цилиндре осуществляет четыре тактовых движения – два вверх и два вниз. Тактовое движение начинается с крайней точки (нижней или верхней) и проходит следующие этапы: впуск, сжатие, движение и выпуск.
Более детально рассмотрим особенности работы ДВС на каждом из тактов.
Впуск начинается в крайней точке (МТ – мертвая точка). Не имеет значения, с какой точки начинается движение, с верхней МТ или нижней МТ. Начиная свое движение в цилиндре, поршень захватывает поступившую топливно-воздушную смесь при открытом клапане впуска. При этом ТВС может образовываться как во впускном коллекторе, так и в камере сгорания.
При сжатии клапаны впуска полностью закрыты, ТВС начинает сжиматься непосредственно в цилиндрах. Это происходит за счет обратного поршневого движения от одной МТ к другой. При этом ТВС сжимается до размера самой камеры сгорания. Сильное сжатие обеспечивает более продуктивную работу ВДС.
Такт движения (рабочий ход)
На данном такте осуществляется розжиг воздушно-топливной смеси. Это может быть как путем самовоспламенения (для дизельных двигателей), так и принудительным воспламенением (для бензиновых двигателей). Вследствие возгорания ВТС происходит быстрое образование газов, энергия которых воздействует на поршень, приводя его в движение. КШМ трансформирует поступательные поршневые движения во вращательные вала. Клапаны системы на такте движения, как и на такте сжатия должны быть полностью закрытыми.
На последнем такте выпуска происходит открытие всех выпускных клапанов, после чего газораспределительный механизм удаляет отработанные газы из ДВС в выпускную систему, где происходит очистка, охлаждение и снижение уровня шума. В конце происходит полный выброс газов в атмосферу.
После завершения такта выпуска, циклы повторяются, начиная с такта впуска.
Видео, в котором наглядно показывается устройство и работа двигателя внутреннего сгорания:
Электрический двигатель постоянного тока
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
 Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
 Рисунок 2. Схемы подключения обмоток статора ДПТ
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
 Рисунок 3. Ротор с тремя обмотками
Рисунок 3. Ротор с тремя обмотками  Рисунок 4. Якорь со многими обмотками
Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
 Рисунок 5. Схема электромотора с многообмоточным якорем
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
 Рис. 6. Принцип работы ДПТ
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
 Примеры механических характеристик ДПТ независимого возбуждения
Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
 Пример регулировочных характеристик двигателя с якорным управлением
Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.