T изменить частоту оборотов двигателя
Как можно регулировать обороты асинхронного двигателя: обзор способов
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.

Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
- Изменение скорости АД с короткозамкнутым ротором
- Частотное регулирование
- Переключение числа пар полюсов
- Способы управления скоростью АД с фазным ротором
- Изменение питающего напряжения
- Активное сопротивление в цепи ротора
- Асинхронный вентильный каскад и машины двойного питания
- Плавный пуск асинхронных электродвигателей
- Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
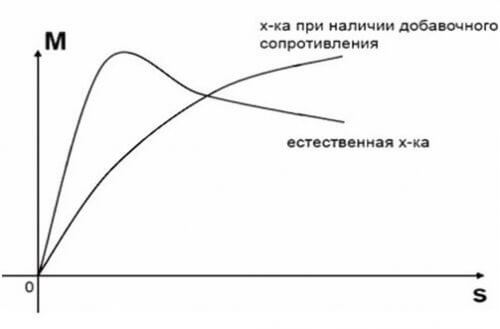
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
 Достоинствами данного метода являются:
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.

В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.

Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
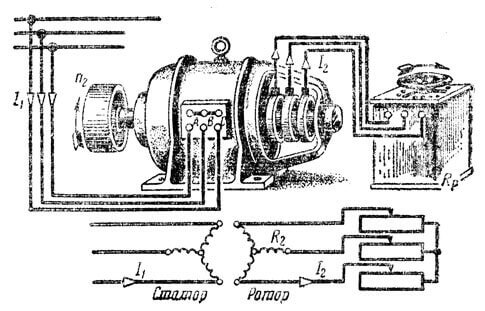
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.

Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.

Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
T изменить частоту оборотов двигателя
Трёхфазный двигатель к однофазной сети подключен? Если да, то он и на номинальных оборотах выдаёт не ту мощность, которая у него на шильдике указана, а 50-70% от того значения.
Некоторая мощность всё же теряется и при снижении частотником номинальных оборотов асинхронного двигателя. Точно не скажу какая именно часть. Но наверное в Вашем применении это не столь важно, если потеряется допустим 10-15% мощности (при 3-фазном включении). Ведь в бетономешалке должен иметься запас по мощности у двигателя. Не может же он там мешать на пределе своих возможностей, наверняка применили двигатель с некоторым запасом по мощности. Я Вас понимаю, не хочется терять мощность при регулировании оборотов, но думаю это неизбежно.
Вот нагуглился вариант простого в плане схемотехники изменения скорости, но какой-то стрёмный вариант. Механику якоря переделывать нужно.
Есть ещё относительно простой метод регулирования частоты вырезанием кусков синусоиды, вот тут с конца страницы обсуждают. Метод хорошо подходит для мощных двигателей (какая именно у Вас мощность так и не сказали). Мне кажется слишком много мощности потеряется при таком способе регулирования.
А вообще для асинхронника не придумывается вариантов, кроме построения хотя бы простенькой схемы изменения частоты. То есть построить частотник, конечно без всяких там точных векторных регулировок и защит. Но это всё же немалый труд. И выходная часть этого частотника будет зависеть от мощности применяемого двигателя.



![]()
![]()

![]()
![]()

да

![]()
![]()

Это только планируется ещё как самодельная штука. Я вот пока думаю ещё -стоит ли заморачиваться, и насколько сложно и дорого мне это встанет, или будет в конце концов проще приобрести готовую,чем мучиться.
Но там планируется очень хитрая бетономешалка,которая потребует переделок, поэтому покупную портить тем более не хотелось бы,и не совсем оно подойдёт для этого.
Я сразу написал, да видел я уже кучу таких самодельных конструкций, и большинство из них построено с механическими редукторами или ременными,цепными или червячными.
Но такую вещь откопать где-то ещё не так просто готовую, или сделать, подогнать всё.
Вся эта механика -она ломается, изнашивается. Ремни,цепи будут слетать. Всё это надо будет потом менять. В общем говно какое-то.
Всё гениальное должно быть просто!
Нужен прямой привод, и максимальный упор я лучше сделаю на электрическую часть. Тут я хоть как-то что-то отрегулирую,подремонтирую.
В тоже время, когда я был на бетоно-смесительном заводе, там движки стояли как раз на самих мешалках. Никаких хитрых передаточных механизмов я там не заметил.
Как у них управляются эти движки -мне не довелось вникнуть. Да скорей всего частотники стоят.
А как же вот например в электроинструменте? У меня дрель с регулятором оборотов.
На максимуме в ней дури до хрена, крутится быстро. На минимуме, если ещё и кнопочку не дожимать- еле крутится как шуруповёрт.
Можно ведь сделать регулятор по такому принципу, только для более мощного двигателя? Ну то есть эту схему как-то усилить?
Или вот в стиралках. Идёт режим отжима белья. Барабан то плавно разгоняется, то останавливается. Не очень быстро вращается? Вполне подойдут такие обороты для перемешивания цемента. Значит есть в ней какая-то схема управления двигателем?
Либо двигатель какой-нибудь низкооборотистый там.
Форум АСУТП
Клуб специалистов в области промышленной автоматизации

- Обязательно представиться на русском языке кириллицей (заполнить поле «Имя»).
- Фиктивные имена мы не приветствуем. Ивановых и Пупкиных здесь уже предостаточно — придумайте что-то пооригинальнее.
- Не писать свой вопрос в первую попавшуюся тему — вместо этого создать новую тему.
- За поиск и предложение пиратского ПО — бан без предупреждения.
- Рекламу и частные объявления «куплю/продам/есть халтура» мы не размещаем ни на каких условиях.
- Перед тем как что-то написать — читать здесь и здесь.
Зачем частотному преобразователю информация о номинальной скорости вращения асинхр. двигателя?
Зачем частотному преобразователю информация о номинальной скорости вращения асинхр. двигателя?
Сообщение YurLex » 26 апр 2019, 19:50
Зачем частотному преобразователю информация о номинальной скорости вращения асинхр. двигателя?
Сообщение Михайло » 27 апр 2019, 10:54
Зачем частотному преобразователю информация о номинальной скорости вращения асинхр. двигателя?
Сообщение YurLex » 27 апр 2019, 11:16
Зачем частотному преобразователю информация о номинальной скорости вращения асинхр. двигателя?
Сообщение paul-th » 27 апр 2019, 17:51
Зачем частотному преобразователю информация о номинальной скорости вращения асинхр. двигателя?
Сообщение YurLex » 28 апр 2019, 00:07
Зачем частотному преобразователю информация о номинальной скорости вращения асинхр. двигателя?
Сообщение paul-th » 28 апр 2019, 08:23
Зачем частотному преобразователю информация о номинальной скорости вращения асинхр. двигателя?
Сообщение YurLex » 28 апр 2019, 08:53
Зачем частотному преобразователю информация о номинальной скорости вращения асинхр. двигателя?
Сообщение paul-th » 28 апр 2019, 14:36

Зачем частотному преобразователю информация о номинальной скорости вращения асинхр. двигателя?
Сообщение Serex » 28 апр 2019, 23:00

Зачем частотному преобразователю информация о номинальной скорости вращения асинхр. двигателя?
Сообщение petr2off » 29 апр 2019, 07:05
Зачем частотному преобразователю информация о номинальной скорости вращения асинхр. двигателя?
Сообщение Parliament74 » 29 апр 2019, 10:30
Вы, наверное, удивитесь, но помимо количества полюсов, для ПЧ важно знать ещё целый ряд параметров, например момент инерции, сопротивление статора, сопротивление кабеля, номинальную скорость двигателя, индуктивности и множество других. Все эти данные нужны для правильной работы математической модели двигателя. Правда, в-основном, все эти параметры ПЧ сам считает при процедуре автонастройки и в 99,99% случаев такого расчёта более чем достаточно для нормальной работы привода.
Отправлено спустя 3 минуты 22 секунды:
Зачем частотному преобразователю информация о номинальной скорости вращения асинхр. двигателя?
Сообщение Михайло » 01 май 2019, 05:30
Зачем частотному преобразователю информация о номинальной скорости вращения асинхр. двигателя?
Сообщение maxamin » 08 май 2019, 19:33
Преимущества векторного режима:
1) высокая точность регулирования скорости. Это нужно для станков, например, где требуется позиционирование.
2) плавный старт и плавное вращение двигателя во всем диапазоне частот. В скалярном режиме есть проблемы на низких скоростях.
3) быстрая реакция на изменение нагрузки: при изменении нагрузки практически не происходит изменения скорости.
4) снижаются потери на нагрев и намагничивание, повышается КПД электродвигателя. Т.е. это меньшее потребление электроэнергии, чем при скалярном режиме.
А если отвечать на вопрос
— то хотя бы для точного позиционирования вала. Есть частотники, где реализован этот функционал — поворот на заданный угол, движение по заданным точкам — количеству шагов энкодера.
Но с векторным режимом могут быть проблемы. Например, я запускал конвейер и он не мог стронуться, пока не перешел на скалярный режим. Хотя автонастройку параметров двигателя делал. Скалярный режим в основном используется нефтяниками для погружных электродвигателей — там на выходе низковольтного частотника стоит повышающий транс. Через трансформатор векторное регулирование не работает. Векторный режим не совсем адекватно работает при использовании синусных фильтров на выходе, т.к. добавляется существенная индуктивность, которая зачастую не учитывается в настройках ПЧ. А т.к. для векторного режима нужно знать параметры ротора, то автонастройка скорее всего неправильно эти параметры посчитает при наличии синусного фильтра.
Механическое регулирование числа оборотов дизельного двигателя
Применение
Приемистость автомобиля с дизельным двигателем можно назвать удовлетворительной, когда двигатель постоянно реагирует на команды водителя через педаль акселератора. Кроме этого, при движении двигатель не должен стремиться к остановке. Двигатель должен при изменении положения педали акселератора плавно разгоняться или замедляться без перебоев. На ровной дороге и удерживании педали акселератора в ладанном положении скорость автомобиля должна также оставаться постоянной. Когда педаль отпускается, двигатель должен тормозить автомобиль. На дизельном двигателе для обеспечения выполнения всех этих требований имеется регулятор числа оборотов (на ТНВД).

Рис. Регулятор числа оборотов двигателя
Регулятор включает в себя механический (центробежный) регулятор и рычаг. Имеется чувствительное устройство управления, которое определяет положение втулки управления, определяя таким образом ход педали и, соответственно количество впрыскиваемого топлива. Есть возможность адаптации реакции регулятора к изменениям установочной точки путем изменения конструкции рычага.
Функции регулятора числа оборотов дизельного двигателя
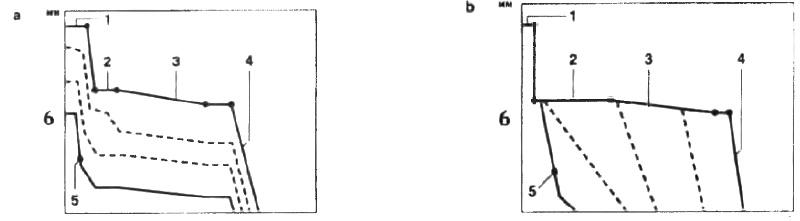
1. Подача при запуске; 2. Подача при полной нагрузке; 3. Управление крутящим моментом (положительный); 4. Регулировка оборотов при полной нагрузке; 5. Холостой ход; 6. Ход втулки управления; 7. Обороты двигателя; а — регулятор минимальных и максимальных оборотов; Ь — регулятор регулируемых оборотов.
Основной задачей всех регуляторов является ограничение максимальных оборотов двигателя. В зависимости от типа регулятор также реагирует на поддержание постоянными определенных оборотов двигателя, таких как обороты холостого хода или минимальных и максимальны) оборотов двигателя в определенном диапазоне оборотов или полном диапазоне оборотов между оборотами холостого хода и максимальными оборотами. Различные типы регуляторов являются прямым результатом различных обозначений регуляторов:
- регулирование низких оборотов холостого хода: низкие обороты холостого хода управляются регулятором ТНВД
- регулирование минимальных оборотов: когда педаль акселератора нажимается полностью, максимальные обороты при полной нагрузке не должны возрастать более чем до повышенных оборотов холостого хода (максимальных оборотов), когда нагрузка убирается. При этом регулятор реагирует путем перемещения втулки управления обратно в направлении положения остановки двигателя, а подача топлива к двигателю уменьшается
- регулирование промежуточных оборотов: регуляторы изменяемых оборотов включают регулирование промежуточных оборотов. В определенных пределах эти регуляторы могут также поддерживать обороты двигателя между холостыми и максимальными на постоянном уровень. Это означает, что в зависимости от нагрузки, обороты двигателя изменяются в рабочем диапазоне только между nв (заданные обороты на кривой полной нагрузки и nт (.без нагрузки на двигателе).
Другие функции управления выполняются регулятором в дополнение к его регулирующим возможностям:
- сброс или блокировка дополнительного топлива, требуемого для запуска двигателя.
- изменение подачи пои полной нагрузке в зависимости от оборотов двигателя (управление крутящим моментом).
В некоторых случаях для реализации этих дополнительных возможностей необходима установка дополнительных модулей.
Точность регулирования оборотов двигателя
Параметр, используемый в качестве меры для точности регулятора при управлении оборотами двигателя при снятии нагрузки с двигателя является так называемым коэффициентом снижения оборотов (коэффициент Р) или же просто снижением оборотов. Это увеличение оборотов, выраженное в процентах, которое имеет место, когда нагрузка дизельного двигателя убирается при неизменном положении рычага управления (педали акселератора). В области управляемых оборотов увеличение оборотов двигателя не должно превышать определенное значение. Оно определяется повышенными оборотами холостого хода. Это обороты двигателя, которые имеют место когда дизельный двигатель, начиная со своих максимальных оборотов при полной нагрузке, полностью освобождается от всей нагрузки. Увеличение оборотов пропорционально изменению нагрузки и увеличивается пропорционально ей.
б = (nl0 — nvo)/nv0
где б — коэффициент Р (коэффициент снижения оборотов);
nl0- повышенные обороты холостого хода (максимальные обороты);
nv0 — максимальные обороты при полной нагрузке.
Требуемое снижение оборотов зависит от области применения двигателя. К примеру, для двигателя используемого для привода электрического генератора требуется небольшой коэффициент снижения оборотов, так как изменения нагрузки вызывают небольшие изменения числа оборотов. С другой стороны, для автомобильных применений желательны большие коэффициенты снижения оборотов, т.к они приводят к более стабильному управлению в случае лишь небольших изменений нагрузки разгон или торможение; и к лучшей приемистости Низкое значение коэффициента приведет к жесткой, резкой работе при изменениях нагрузки.
Регулятор изменяемых оборотов
Регулятор изменяемых оборотов управляет всеми оборотами двигателя в диапазоне между режимом запуска и максимальными оборотами. Этот регулятор управляет оборотами холостого хода и максимальными оборотами при полной нагрузке, а также оборотами в промежуточной области. При этом педалью акселератора могут быть выбраны любые обороты двигателя, и они в зависимости от коэффициента снижения оборотов, будут поддерживаться практически постоянными. Это необходимо, к примеру, когда на автомобиль устанавливаются дополнительные агрегаты (лебедки, насосы, краны и т.д.). Регулятор изменяемых оборотов часто устанавливается на грузовых и сельскохозяйственных автомобилях.

Рис. Кривые характеристик регулятора изменяемых оборотов:
A. Положение запуска для втулки управления; S. Двигатель запускается с пусковой подачей топлива; S-L пусковая подача топлива уменьшается до количества топлива режима холостого хода; L. Обороты холостого хода; nум. следующие за запуском двигателя (без нагрузки); L-B. Фаза разгона двигателя после перемещения рычага управления оборотами двигателя из режима холостого хода до требуемой величины оборотов n; В-В’. Втулка управления недолго остается в положении полной нагрузки и вызывает быстрое увеличение оборотов двигателя; В’-С. Втулка управления двигается назад (меньшее количество впрыскиваемого топлива, более высокие обороты двигателя). В соответствии с коэффициентом снижения оборотов автомобиль поддерживает требуемые обороты n в области частичной нагрузки; Е. Обороты двигателя n после снятия нагрузки с двигателя с неизменным положение рычага управления оборотами двигателя; 1. Ход втулки управления; 2. Полная нагрузка; 3. Обороты двигателя.
Конструкция и принцип работы регулятора числа оборотов двигателя
Регулятор приводится в движение приводным валом и содержит в себе корпус грузиков с грузиками (1). Регулятор соединен с валом регулятора, который закреплен в корпусе регулятора и свободно вращается вокруг него. Когда грузики вращаются, они поворачиваются наружу под действием центробежной силы и их радиальное движение преобразуется в осевое движение скользящей втулки. Ход скользящей втулки (2) и усилие, создаваемое ею, влияют на регулирующий рычаг (не показан). Взаимодействие усилий пружины и усилий скользящей втулки определяет положение рычага управления, изменение которого передается на втулку управления, результатом чего будет регулирование количества впрыскиваемого топлива.
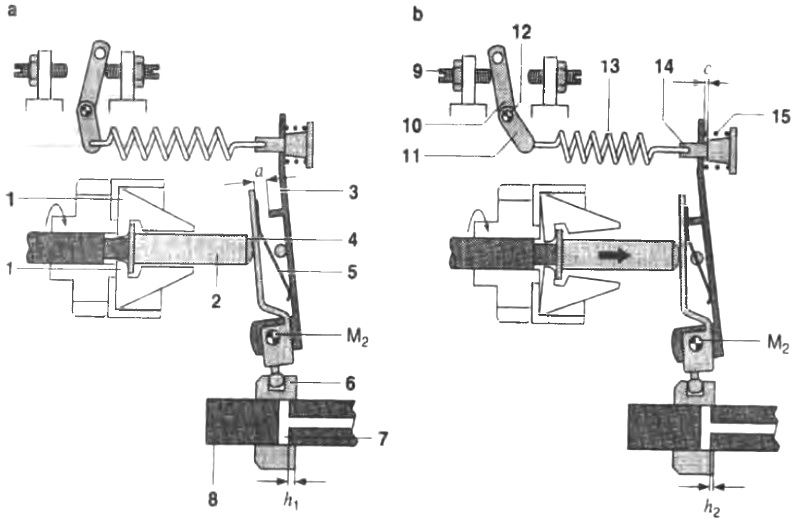
Рис. Конструкция регулятора числа оборотов двигателя
Запуск
Когда двигатель остановлен, центробежные грузики и скольгящая втулка находятся в исходном положении. Пусковой рычаг (4) нажат в положении запуска (рис. а) с помощью пусковой пружины (5) и поворачивается относительно своего шарнира М. В то же самое время втулка управления (6) на плунжере распределителя (8) перемешается в свое пусковое положение с помощью стержня с шариком на пусковом рычаге. Это означает, что когда двигатель проворачивается стартером плунжер распределителя должен пройти через полный рабочий ход (аналог максимальной подачи топлива) перед открыванием отверстия отсечки (7) и прекращением подачи. Таким образом, пусковая подача (аналог максимальной подачи) достигается автоматически при проворачивании двигателя стартером.
Регулировочный рычаг удерживается в корпусе насоса так, что он может вращаться. Он может быть перемещен с помощью регулировочного винта подачи топлива.
Подобно этому, пусковой рычаг (4) и натяжной рычага (3) также могут вращаться в регулировочном рычаге. Стержень с шариком, который входит во втулку управления, соединен с нижней стороной пускового рычага, а пусковая пружина — с его верхней частью. Пружина оборотов холостого хода соединена со штифтом крепления (14) на верхнем конце натяжного рычага. К этому штифту подсоединена пружина регулятора (13). Соединение с рычагом управления оборотами двигателя (10) осуществляется через рычаг (11) и вал рычага управления (12).
Для перемещения скользящей втулки против действия мягкой пусковой пружины на расстояние (а) необходимы очень низкие обороты, При этом пусковой рычаг поворачивается вокруг шарнира М (для 4 и 6) и пусковое количество топлива автоматически уменьшается до количества топлива, соответствующего холостому ходу, h — максимальный рабочий ход (запуск).
Управление низкими оборотами холостого хода
На работающем двигателе и отпущенной педали акселератора рычаг управления оборотами двигателя перемещается в положение холостого хода до регулировочного винта (9) оборотов холостого хода (рис. b). Обороты холостого хода подбираются так, чтобы двигатель работал устойчиво и мягко, когда он ненагружен или нагружен слегка. Действительное управление производится с помощью пружины оборотов холостого хода (15) на штифте крепления, который противодействует силе, развиваемой центробежными грузиками.
Этот баланс сил определяет положение скользящей ВТУЛКИ относительно поперечного отверстия плунжера распределителя (7) и, соответственно, его рабочего хода. При оборотах выше холостых пружина сжимается на величину (с) и более не работает (h2 — минимальный рабочий ход/холостой ход). Используя специальную пружину оборотов холостого хода, подсоединенную к корпусу регулятора, можно отрегулировать обороты холостого хода независимо от положения педали акселератора и увеличить или уменьшить их в зависимости от температуры или нагрузки.
Работа под нагрузкой
При работе, в зависимости от требуемых оборотов двигателя или скорости двигателя, рычаг управления оборотами двигателя (2) находится в заданном положении в пределах области своего хода. Это определяется водителем путем изменения положения педали акселератора. При оборотах двигателя, превышающих холостые, пусковая пружина (9) и пружина оборотов холостого хода (5) сжаты полностью и больше не влияют на работу регулятора. Это производится пружиной регулятора (4).
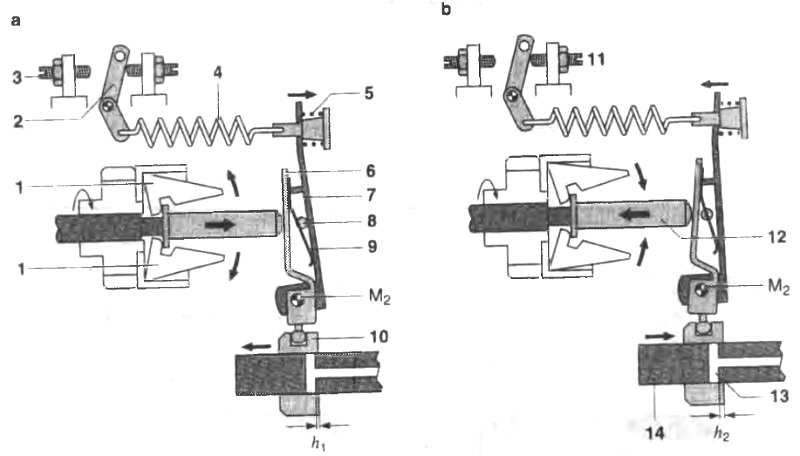
Рис. Работа под нагрузкой:
а) Работа регулятора при увеличении оборотов двигателя; b) Работа при уменьшении оборотов двигателя; 3. Регулировочный винт оборотов холостого хода; 8. Стопор натяжного рычага; 11. Регулировочный винт для повышенных оборотов холостого хода (максимальных оборотов); 14. Плунжер распределителя; h1 — рабочий ход на холостом ходу; h2 — рабочий ход при полной нагрузке; M1 — шарнир для 6 и 7.
Пользуясь педалью акселератора, водитель устанавливает рычаг управления оборотами двигателя в определенное положение, соответствующее желаемой скорости автомобиля. В результате такой регулировки положения рыча, а управления, пружина регулятора растягивается на заданную величину и в результате усилие пружины регулятора превышает центробежную силу грузиков (1) и приводит к повороту пускового рычага (6) и натяжного рычага (7) относительно шарнира М, Благодаря передаточному числу механической трансмиссии, включенной в систему, втулка управления (10) смещается в направлении полной нагрузки. В результате подача топлива увеличивается, а обороты двигателя возрастают. Это приводит к тому, что центробежные грузики создают большее усилие, которое через скользящую втулку (12) противодействует усилию пружины регулятора.
Втулка управления остается в положении полной нагрузки до тех пор, пока имеется баланс сил. Если обороты двигателя продолжают увеличиваться, то грузики расходятся еще больше усилие скользящей втулки преобладает и в результате пусковой и натяжные рычаги поворачиваются вокруг М и прижимают втулку управления в направлении остановки двигателя так, что управляющий кана (отверстие) (13) откроется раньше. Возможно уменьшить подачу топлива до нуля, что обеспечит ограничение оборотов двигателя. Это означает, что при работе и пока двигатель не перегружается, каждое положение рычага управления оборотами двигателя соответствует конкретному диапазону оборотов между полной нагрузкой и нулем. В результате этого в пределах, устанавливаемых коэффициентом снижения оборотов, регулятор поддерживает желаемые обороты.
Если нагрузка увеличивается до такой степени, что даже если втулка управления находится в положении полной нагрузки, а обороты двигателя продолжает падать, то это значит, что увеличение подачи топлива далее невозможно. Двигатель перегружается и водитель должен переключиться на пониженную передачу.
Торможение двигателем
При движении под уклон, двигатель сам приводится в движение автомобилем и обороты двигателя стремятся увеличиться. Это вызывает движение грузиков наружу, так что скользящая втулка давит на натяжной и пусковой рычаги. Оба рычага меняют свое положение и прижимают втулку управления в направлении уменьшения подачи топлива, пока не будет достигнуто уменьшенное значение подачи топлива, которое соответствует новому уровню нагрузки. В крайнем случае значение подачи равно нулю. В основном, для регулятора изменяемых оборотов это поведение применимо для всех положений рычага управления оборотами двигателя, когда нагрузка или обороты двигателя изменяются до такой степени, что втулка управления перемещается в положение полной на грузки или остановки двигателя.