Анимация работы шагового двигателя
Анимация работы шагового двигателя
В современных системах управления широко используются устройства, оперирующие с цифровой формой сигнала. Цифровая форма представления сигнала привела к созданию нового типа двигателей – шаговых двигателей (ШД).
Шаговые двигатели – это электромеханические устройства, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи.
Современные ШД являются по сути синхронными двигателями без пусковой обмотки на роторе, что объясняется не асинхронным а частотным пуском ШД. Роторы могут быть возбужденными (активными) и невозбужденными (пассивными).
Рассмотрим принцип действия простейшего однофазного шагового двигателя.
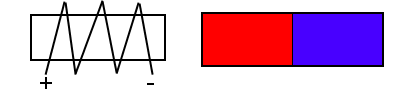
Двухполюсный ротор из магнитомягкой стали с клювообразными выступами помещен в четырехполюсный статор (рис.3.1). Одна пара полюсов выполнена из постоянных магнитов, на другой – находится обмотка управления.
Пока тока в обмотках управления нет, ротор ориентируется вдоль постоянных магнитов и удерживается около них с определенным усилием, которое определяется магнитным потоком полюсов Фпм.
При подаче постоянного напряжения на обмотку управления возникает магнитный поток Фу примерно вдвое больший, чем поток постоянных магнитов. Под действием электромагнитного усилия, создаваемого этим потоком, ротор поворачивается, преодолевая нагрузочный момент и момент, развиваемый постоянными магнитами, стремясь занять положение соосное с полюсами управляющей обмотки. Поворот происходит в сторону клювообразных выступов, т.к. магнитное сопротивление между статором и ротором в этом направлении меньше, чем в обратном.

Рис. 3.1. Схема простейшего однофазного ШД
Следующий управляющий импульс отключает напряжение с обмотки управления и ротор поворачивается под действием потока постоянных магнитов в сторону клювообразных выступов.
Достоинством однофазных ШД с постоянными магнитами является простота конструкции и схемы управления. Для фиксации ротора при обесточенной обмотке управления не требуется потребление энергии, угол поворота сохраняет свое значение и при перерывах в питании. Двигатели этого типа отрабатывают импульсы с частотой до 200-300 Гц. Их недостатки – низкий КПД и невозможность реверса.
§ 3.2. Реверсивные шаговые двигатели
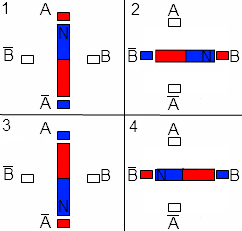
Для осуществления реверса зубцы статора и ротора ШД должны быть симметричными (без клювообразных выступов). Рассмотрим работу двухфазного двухполюсного ШД с активным ротором в виде постоянного магнита. Будем считать, что намагничивающие силы фаз (НС) распределены по синусоидальному закону.
При включении фазы под постоянное напряжение (условно положительной полярности) вектор НС статора совпадет с осью фазы А. В результате взаимодействия НС статора с полем постоянного магнита ротора возникнет синхронизирующий момент Мс = Mmaxsinq, где q — угол между осью ротора и вектором НС.
При отсутствии тормозного момента ротор займет положение, при котором его ось совпадет с осью фазы А (рис. 3.2, первый такт). Если теперь отключить фазу А и включить фазу В, вектор НС и ротор повернуться на 90 о (второй такт на рис. 3.2). При включении фазы А на напряжение обратной полярности (третий такт на рис. 3.2) НС и ротор повернутся еще на 90 о и т.д.
Если к ротору ШД приложен момент нагрузки, то при переключении фаз ротор будет отставать от вектора НС на некоторый угол qн= arcsin(Mн/Mmax).

Рис. 3.2. Устойчивые положения ротора при включении фаз
Рассмотренный способ переключения обмоток можно представить в виде табл.1
Такой же шаг двигателя, но в  раз большое значение намагничивающей силы (и соответственно синхронизирующего момента) можно получить при одновременном переключении двух обмоток по алгоритму, показанному в табл.2
раз большое значение намагничивающей силы (и соответственно синхронизирующего момента) можно получить при одновременном переключении двух обмоток по алгоритму, показанному в табл.2
Шаг двигателя можно уменьшить в 2 раза, если обмотки переключать в соответствии с табл.3
В зависимости от типа электронного коммутатора управление ШД может быть:
·одноплярным или разнополярным;
·симметричным или несимметричным;
·потенциальным или импульсным.
При однополярном управлении напряжение каждой фазе изменяется от 0 до +U, а при разнополярном – от -U до +U.
Управление называется симметричным, если в каждом такте коммутации задействуется одинаковое число обмоток, и несимметричным – если разное. Способы переключения обмоток, соответствующие тал. 1 и 2 будут симметричными, а по табл.3 – несимметричным.
При потенциальном управлении напряжение на обмотках изменяется только в моменты поступления управляющих импульсов. При отсутствии управляющего сигнала обмотка или группа обмоток находятся под напряжением, а положение ротора фиксируется полем обмоток. При импульсном управлении напряжение на обмотки подается только на время отработки шаг, после чего оно снимается и ротор удерживается в заданном положении либо реактивным моментом, либо внешним фиксирующим устройством.
В двухполюсной машине число устойчивых положений в пределах одного оборота ротора n следующее (m — число фаз):
1.при однополярной коммутации и симметричном управлении n = m;
2.при разнополярной коммутации с симметричным управлением n = 2m;
3.при несимметричной разнополярной коммутации n = 4m.
Очевидно, что несимметричная коммутация возможно только при m ³ 2.
В многополюсных ШД число устойчивых положений возрастает пропорционально числу пар полюсов р.
Одним из определяющих параметров ШД является шаг ротора, т.е. угол поворота ротора, соответствующий одному управляющему импульсу (угол между двумя соседними устойчивыми состояниями)

Для рассмотренных двигателей р = 1, m = 2 (в первом двигателе одному такту соответствует действие возбужденных полюсов, а другому, при отключении обмотки, – действие полюсов с постоянными магнитами). Следовательно, при разнополярной симметричной коммутации шаг двигателейa = 90 o . При несимметричной разнополярной коммутации a = 45 o .
Если в двухфазном двигателе выполнить выводы средних точек, он фактически превращается в четырехфазный ШД (рис.3.3). В отличие от двигателей с обычной двухфазной обмоткой, питаемой разнополярными импульсами, данный двигатель можно питать однополярными импульсами, что значительно упрощает коммутатор, хотя и приводит к несколько худшему использованию материалов.

Рис.3.3. Схема обмоток и порядок коммутации 4-х фазного ШД
Магнитоэлектрические ШД удается выполнить с шагом до 15 о . Дальнейшее уменьшение шага ограничено технологическими трудностями создания ротора в виде постоянного магнита с числом пар полюсов больше шести.
Гораздо более мелкий шаг (до долей градуса) можно получить в редукторных (индукторных) ШД. Индукторные ШД выполняются с числом фаз m = 2¸4. Они имеют зубчатый ротор с равномерно расположенными zp зубцами и гребенчатые зоны статора, смещенные относительно друг друга на угол 2p/(mzp) (например, рис.3.4). Число пазов статора и ротора, их геометрические размеры выбираются такими, чтобы обеспечить необходимую величину шага и синхронизирующего момента при заданном виде коммутации токов.

Рис. 3.4. Геометрия магнитной системы индукторного ШД
Основной особенностью индукторных двигателей является то, что магнитное поле в зазоре содержит постоянную и переменную составляющие. Постоянная составляющая поля возбуждается либо постоянной составляющей тока обмоток управления – у двигателей с самовозбуждением, либо специальной обмоткой возбуждения – у двигателей с независимым возбуждением, либо постоянными магнитами – у магнитоэлектрических двигателей. Переменная составляющая магнитного поля создается импульсами тока обмоток управления, поступающими от электронного коммутатора.
Драйвер шагового двигателя своими руками
Шаговый двигатель используется в машинах для точного перемещения. Наладим управление шаговым двигателем через USB с компьютера своими руками. Нам потребуется:
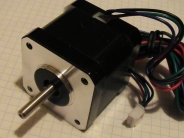
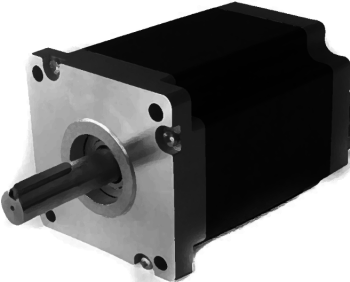
1) Шаговый двигатель, возьмем — Nema23 76 мм, вместо него может быть другой, управлять будем биполяным методом, любой гибридный и биполярный шаговый двигатель будет работать с таким же управлением.
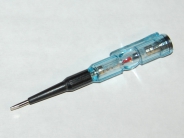
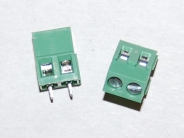
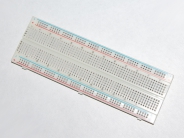
2) Блок питания, возьмем — импульсный блок питания мощностью 360W с выходным напряжением 24V / 15A, может использоваться любой другой блок питания, если будет достаточно мощности и напряжения для работы двигателя. Более мощному двигателю будет нужно больше напряжения. Предел напряжения нашего драйвера ограничивается максимальным напряжением, которое выдерживают транзисторы, это 100V, у нас блок питания на 24V. В случае большего напряжения транзисторы в схеме необходимо заменить на более мощные, также при увеличении напряжения, транзисторы могут начать греться, если такое случилось, необходимо дополнительно обдувать их куллером (у меня все в порядке и куллер не требуется). Для подключения блока питания к сети 220V также нужен шнур и нужно определить где в вашей розетке ноль, а где фаза. Контакт блока N подключается к нулю, а L к фазе, также можно подключить заземление (но не обязательно). Определение возможно при помощи индикаторной отвертки, у меня определилось, что слева ноль, а справа фаза.



Как крутить шаговый двигатель
Шаговый двигатель работает от подачи комбинаций напряжения в разных направлениях на его обмотки, у этого шагового двигателя 2 обмотки — 4 провода, первая обмотка — черный (A) и зеленый (A*) провод, вторая обмотка — красный (B) и синий (B*). За одну смену комбинаций делается 1 шаг — 1,8 градусов. Если комбинации быстро менять, то двигатель будет быстро и точно позиционироваться — крутиться. Смена комбинаций возможна в двух направлениях, соответственно двигатель будет крутиться вперед или назад.
Чтобы крутить шаговый двигатель, надо:
1) Собрать устройство — USB контроллер шагового двигателя на микроконтроллере AVR и драйвер шагового двигателя, 2 в 1. Перед тем как собирать это сложное устройство, рекомендую сначало отдельно собрать и проверить работу только USB контроллера, его я уже собрал вот тут — контроллер USB. Если USB связь работает нормально, то можно приступать к изготовлению драйвера.
2) Написать программу для компьютера, которая будет посылать USB команды устройству.
3) Написать программу для микроконтроллера AVR, которая будет принимать USB команды и крутить двигатель.
USB контроллер шаговых двигателей и USB драйвер шагового двигателя
Взятый нами двигатель является гибридным и поддерживает несколько вариантов управления. Управлять двигателем будем биполярным методом и соответственно собираем мы драйвер биполярного шагового двигателя с USB контроллером. Сначало покажу готовый результат, а потом подробно рассмотрим его. Вот фото собранного драйвера шагового двигателя с USB управлением, который я собрал:
Драйвер шагового двигателя с USB управлением своими руками
Схема драйвера биполярного шагового двигателя и USB контроллера (схема длинная и нуждается в прокрутке для просмотра):
Драйвер шагового двигателя USB на микроконтроллере AVR своими руками









Дополнительно нужно (нет в наличии):
1) Модуль питания DC-DC SMAU01L-12 (вместо него пойдет любой конвертер DC-DC с 5V до 10V-15V) — 1 шт., возможно можно без него, от 5V питать (не проверено)
Главным компонентом схемы является программируемый микроконтроллер AVR — ATmega16A, если вы не знаете как с ними работать (записывать программу), сначало ознакомьтесь с основами такой работы, которые подробно описаны в первой статье
управление машиной. Для устройства можно использовать и другой микроконтроллер AVR, я выбрал ATmega16A, т.к. в нем с запасом имеется много памяти и контактов для подключения нескольких двигателей и большого количества рабочих инструментов.
Слева от ATmega16A находятся компоненты для организации связи по протоколу USB — к выводам XTAL подключен внешний кварцевый резонатор с USB-совместимой частотой 12 МГц. Для сглаживания сигнала у него есть 2 конденсатора по 20 пФ, все это соединяется с минусом питания. К контактам, через которые идет обмен сообщениями с USB, подключены 2 резистора по 68 Ом, как того требует протокол USB. Резистор на 1.5 кОм, подключенный к D- линии задает низкоскоростной режим работы USB устройства. Диоды Зенера 3V6 понижают напряжение на линиях, через которые идет обмен данными USB с 5 до 3.6V.
Управление двигателем подключается к контактам PB0, PB1, PB2, PB3, на остальные свободные P-контакты можно в будующем подключить еще двигатели и рабочие инструменты, но пока они пустуют. Микроконтроллер ATmega16 отдает команды и обрабатывает USB сигналы после того как в него записана программа (ниже она будет написана). После него идет конструкция из микросхем IR2102 и транзисторов IRF540N (2 так называемых H-моста) — она приводит шаговый двигатель в движение.
Драйвер IR2101 нужен для преодаления большой емкости затвора транзистора IRF540N, что позволяет открывать и закрыть транзистор с большой скоростью (например принимать сигнал ШИМ, которым может регулироваться скорость двигателя при необходимости — об этом сигнале дальше напишу), что нам и нужно. К сожалению для питания этого драйвера необходимо 10-15V, у нас есть только 5V от USB. Поэтому пришлось поставить компонент DC-DC SMAU01L-12, который преобразует 5V в 12V, вместо него можно использовать любой другой способ получения такого напряжения, например, при помощи трансформатора или любым другим путем. К VCC подключается +12V, к COM -12V. Один драйвер работает с 2мя транзисторами — верхним (H) и нижним (L). Контакты HIN и LIN — входной сигнал с микроконтроллера для верхнего и нижнего транзистора, по этому сигналу транзисторы открываются и закрываются. HO и LO — это выходные сигналы, транзисторы подключаются гейтами (G) к этим контактам. Они подключаются не просто так — справа на линиях 2 резистора 10/100 Ом и диод, они нужны для нормальной работы транзисторов — чтобы они замедлялись при открытии и не замедлялись при закрытии, эти транзисторы слишком быстро открываются и это может вызвать проблемы. Диод и конденсаторы 3300 пФ — нужны для работы драйвера IR2101 согласно документации на эту микросхему.
Каждая обмотка (фаза) двигателя (у двигателя 2 обмотки A и B — 4 контакта) подключается к H-мосту из транзисторов IRF540N. H-мост — это специальная схема соединения транзисторов, которая позволяет подавать через них напряжение высокого уровня (24V) в разных направлениях. Один мост изготавливается из 4-х транзисторов. В итоге здесь вы видите 2 H-моста, которые позволяют гонять разнонаправленное напряжение высокого уровня по 2м обмоткам двигателя и тем самым крутить его.
Обратите внимание, что в мосту — HIN верхнего драйвера соединяется с LIN нижнего драйвера, а LIN верхнего с HIN нижнего. Это сделано для одновременной подачи сигналов. Если вы включили HIN сверху, то обязаны включить LIN с низу, иначе произойдет короткое замыкание. Такое подключение позволяет автоматом включать пару. Впрочем короткое замыкание все же возможно, если вы откроете и HIN и LIN на одном мосте, поэтому не допускайте этого. На контактах PB0 — PB3 допустимы только значения 0000, 1010, 0110, 0101, 1001. Их перебор крутит двигатель. Подача других значений скорей всего приведет к короткому замыканию моста.
Мощные резисторы с низким номиналом 0.1 Ом и высокой мощностью (3-5 Вт) нужны для защиты от высокого тока — это шунты. Если что их можно снять и заменить простым соединением с минусом питания, если например не будет хватать мощности. Для слабых резисторов мощность берется от тока USB: 0.05 А * 5 V = 0.25 Вт (ток USB задается программно, по умолчанию в нашей программе стоит 0.05). Черная полоска на диодах соответствует вертикальной линии на схеме.
Шаговый двигатель и блок питания подключаются к H-мостам, как показано на схеме. Минусы питания 24V, 12V и 5V соединяются. Между плюсом и минусом 24V линии ставится сглаживающий пленочный конденсатор.
Отдельное крупное фото драйвера шагового двигателя:
Урок 25. Управление шаговым двигателем
 Некоторые читатели уже давно просили рассмотреть работу шагового двигателя. Моторчик был приобретен еще полгода назад, алгоритм изучен. Хотелось совместить много всего интересного в одной статье и как обычно, чем больше планируешь, тем ниже шанс доделать устройство. В общем, я решил снова вернуться к этому вопросу и сделать статью как можно проще.
Некоторые читатели уже давно просили рассмотреть работу шагового двигателя. Моторчик был приобретен еще полгода назад, алгоритм изучен. Хотелось совместить много всего интересного в одной статье и как обычно, чем больше планируешь, тем ниже шанс доделать устройство. В общем, я решил снова вернуться к этому вопросу и сделать статью как можно проще.
Представим себе постоянный магнит (ПМ), с осью в центре, относительно которой он может вращаться, синий — север, красный — юг. Рядом с ним электромагнит, который жестко закреплен и пока никуда не подключен, поэтому положение ПМ произвольное.
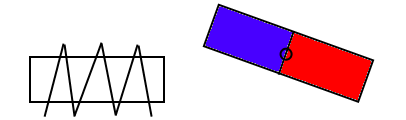
В следующий момент, подаем на начало обмотки минус, на конец плюс. Условимся, что по правилу правой руки (буравчика ) север у электромагнита будет слева, юг справа, поэтому ПМ развернется севером к электромагниту.
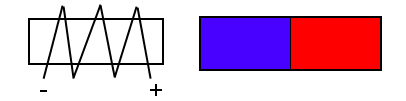
Если поменять полярность электромагнита — полюса поменяются, ПМ развернется. Таким образом, в зависимости от полярности электромагнита у вращающегося ПМ будет два устойчивых состояния, т.е. шаг будет равен 180 градусов.
Если добавить еще один электромагнит, то будет уже четыре устойчивых состояния, т.е. шаг будет 90 градусов.
Картинки весьма условны и не отражают реальной конструкции двигателя, просто на мой взгляд они более наглядны. Двигатели с двумя независимыми обмотками, без выводов от центра обмотки называются биполярными, бывают еще униполярные и четырехобмоточные, но их пока рассматривать не будем.
Мне достался ST-PM35-15-11C, каждый шаг — 7,5 градусов, т.е. 360/7,5=48 шагов на оборот. Номинальное напряжение 12В, сопротивление обмотки 4 Ома.
Для управления шаговым двигателем производитель предлагает такую таблицу.
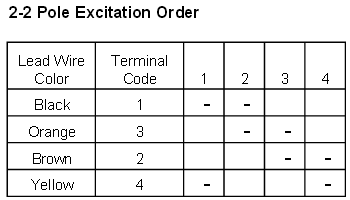
Таким образом все что нам нужно — это подавать напряжение на провода в соответствии с этой таблицей, там где стоят галочки — подать напряжение, там где не стоят — ноль.
Программа очень проста — делаем шаг, ждем секунду и так по кругу. При желании можно запилить управление с компа.
Ради теста можно покрутить это дело в протеусе.
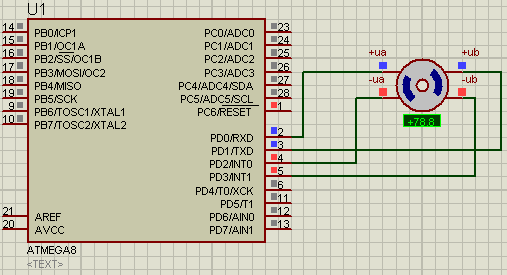
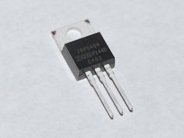
Естественно, ножки микроконтроллера не в состоянии обеспечить достаточный ток. Поэтому можно поставить транзистор, но на каждые два шага полярность напряжения обмотки меняется на противоположную, значит одного транзистора недостаточно, поэтому на каждый вход нужно будет поставить по два транзистора(пуш пул). Кроме того, при отключении обмотки возникают броски обратного напряжения способные пробить транзистор. Поэтому понадобится защитный диод.
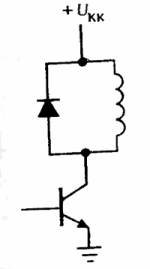
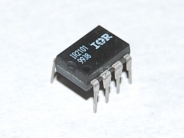
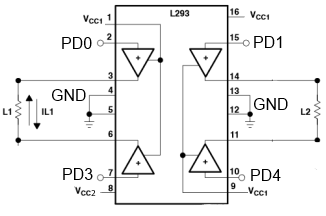
В общем, для таких ленивых людей как я есть микросхемы которые уже содержат в себе эти транзисторы и диоды, остается лишь подавать управляющие импульсы от микроконтроллера. Например L293D, QUADRUPLE HALF-H DRIVERS — драйвер шагового двигателя. Придумывать ничего не надо, в даташите есть пример для биполярного двигателя.
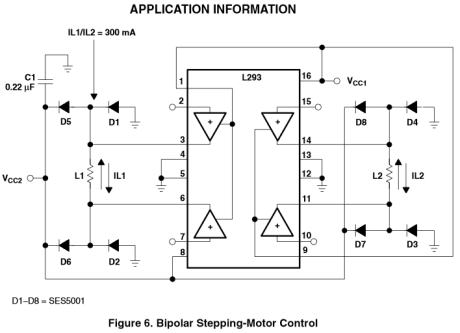
Если не понятно, то на ножки:
8 подаем Vcc2 = от Vсс1 до 36В,
1,9,16 Vсс1 = от 4.5 до 7,
4,5,12,13 — землю,
3,6 — первая обмотка,
11,14 — вторая обмотка.
2,7,10,15 к микроконтроллеру.
Все работает как часы
24 комментария: Урок 25. Управление шаговым двигателем
![]()
![]()
Здравствуйте! Скажите пожалуйста, какой шагогый двигатель можно использовать кроме ST-PM35-15-11C ? Мне нужен подобный двигатель который можно было бы купить на аукционе ebaey
![]()
![]()
Если хотите полностью повторить статью то ищите «bipolar stepper motor»
![]()
![]()
Для начала не мешало бы уточнить приминение мотора. Если просто искать шаговик то можно гордо купить nema23 с током обмотки в 2 и более ампер. С таким током этот драйвер через минуту скажет пшшшшшш и пойдёт дымок. Для чего нужен мотор?
![]()
![]()
Алексей, это как объяснять зачем нужно колесо Принтеры, станки и еще over 9000 где еще. Именно по той причине что вы описали, контролировать ток, напряжение и прочие параметры вы должны самостоятельно. Собственно, забота выбора силовой части тоже лежит на плечах юзера. Это лишь простой пример. Конкретный выбор, можно обсудить на форуме.
![]()
![]()
Так я ж вопрос Янису задавал Он хочет купить подобный. А он уверен что характеристики текущего мотора из статьи ему подойдут. Вот и говорю что если на ебее искать по запросу «bipolar stepper motor» то можно купить гордо нема23 в надежде что он такой же и гордо сжечь драйвер. Кстати можно использовать Л297+Л298 векселей будет
![]()
![]()
лол, занятно получилось, я уж думал объяснять зачем колесо нужно
![]()
![]()
Да понятно это мне) Только вот я не знаю где достать такой двигател.. В ebay его нет как не странно. Вот и ищу подобный ) Пока еще не нашел.
![]()
![]()
Очень познавательная статья. Как раз думал как бы автоматизировать кормушку для домашней живности. Ув. админ, не могли бы вы ещё пролить свет на управление бесколлекторным двигателем из старых винчестеров — у него 3 полюса (6 выводов) + 3 датчика Холла (правильно ли я их назвал) — ещё 6 выводов, которые указывают на положение ротора. Есть конечно специальные дрова, но уж с очень большим обвесом и дискретных элементов, да к тому же очень дорогие. Плюс столкнулся с такой проблемой, что при чрезмерной нагрузке на двигатель он автоматом стопорится. Если сделать свои драйвера, да ещё на 1 мк+усиливающие по току транзисторы — было бы прекрасно!
![]()
![]()
Привет!! Когда тиристором научимся управлять?? Или симистором, там…
![]()
![]()
здравствуйте, имею ШД от принтера, униполярный, не могли бы пример дать как управлять скоростью вращения с помощью обычного потенциометра? может как то с помощью АЦП? изменять напряжение на ноже ацп 0-5В.
![]()
![]()
умножайте значение ацп на коэффициент и используйте полученное число как задержку
![]()
![]()
а вы не помогаете с написанием программы? дело в том что есть два шаговых мотора, хочу намоточный станок сделать с укладчиком. не могу понять где копать, так то вроде относительно понятно, не могли бы пример дать ? микроконтроллер использую Atmega16
![]()
![]()
12 вольт(вплоть до 36) можно и нужно подавать только на 8 ножку микросхемы L293
Устройство шагового двигателя: механизм его действия и назначение, где и как применяется
Шаговые двигатели постоянного тока очень часто используют при работе с установками с числовым программным руководством и робототехнике. Главная отличительная особенность такого вида двигателя – это то, как именно действует.
Суть в том, что его работа не непрерывна, а осуществляется пошагово со сменой установленного угла оборота на один шаг. Так образом рабочий элемент имеет конкретный угол поворота в определенный момент, что позволяет контролировать процесс.
Питание такого мотора делимое, совершаемое импульсно. Именно импульсы и обеспечивают поворот вала на какой-то установленный угол.
В основном такие двигатели функционируют совместно с редуктором, который делает установку на валу максимально четкой и с энкодером, который определяет положение вала в данное время. Все эти детали нам нужны для передачи и меняет угол вращения.
Сегодня мы хотим поделиться с вами своими знаниями о данном типе механизмов, о том, как он работает и зачем нужен.
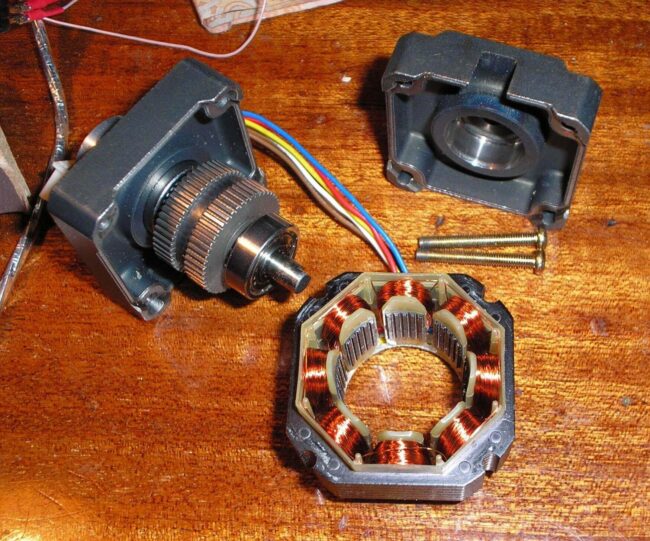
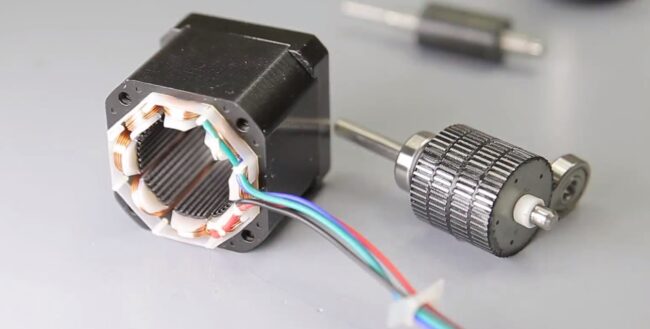
Конструкция шагового двигателя

Если классифицировать данный тип мотора, то его мы отнесем к бесколлекторному синхронному мотору, в составе которого присутствуют статор и ротор.
Ротор имеет раздельные отсеки, состоящие из электротехнической стали, имеет «зубатую» структуру, а они разграничены постоянными магнитами. Статоре имеет специальные обмотки, которые схожи с катушками.
Как же это выглядит на деле?
Понять механизм действия шагового двигателя поможет схематическое изображение. первая позиция: на обмотки А и В подается напряжение установленной полярности.
Затем в статоре формируется электромагнитное поле. в силу того, что разноименные полюса притягиваются, ротор примет свою позицию по оси магнитного поля.
Кроме этого, поле шагового двигателя защищает от возможных действий с целью поменять позицию ротора снаружи. Упростив длинные объяснения, можно сказать так: магнитное поле статора обеспечивает установленную позицию ротора, несмотря на тяжесть.
При условии, когда на обмотки D и С попадает напряжение такой же полярности, электромагнитное поле меняет положение.

При этом ротор совершает шаг номер два, поворачиваясь на девяносто градусов. Третий шаг совершается, когда на обмотки А и В попадает напряжение обратной полярности.
При этом, ротор перемещается к положению, равному ста восьмидесяти градусам и устанавливается в положении, диаметрально противоположному первому.
Далее следует смещение к двумстам семидесяти градусам, когда на обмотки D и C приходится напряжение обратной полярности. Последний, четвертый шаг, совершается, когда на обмотки А и В подается напряжение с позитивным зарядом.
Таким образом, поворот станет равен тремстам шестидесяти градусам. Пропустить один из шагов не удастся. Ротор должен пройти полный оборот, шаг за шагом.
Если попытаться подключить обмотки из первого положения в четвертое, ротор сделает поворот в обратную сторону.
Обмотки бывают разные
В шаговых моторах используют биполярные или униполярные обмотки. Как это работает мы объясняли на примере биполярного устройства. Такой механизм предполагает применение отличных друг от друга фаз для снабжения обмоток.
Такая схема достаточно трудная, кроме того, для нее нужны сильные платы управления, которые стоят немалых денег.
Приборы с униполярными обмотками имеют более простой тип управления. Такие схемы имеют общий «плюс» подключения. На вторые выводы обмоток в порядке очереди подается «минус». Вот так и совершается работа ротора.
Каждый из этих типов имеет преимущества и недостатки. Биполярные шаговые моторы мощнее униполярных, их крутящий момент на сорок процентов превосходит униполярки, хотя вторые легче в управлении.
Типы двигателей по конструкции ротора
Шаговые двигатели делятся зависимо от типа устройства ротора Зависимо от того, какой ротор используют в конкретном устройстве, моторы можно разделить на следующие виды:
- с установленным магнитом;
- с альтернирующим магнитным противодействием;
- гибридные.
Шаговые двигатели с установленными магнитами на роторе аналогичны тем, о которых мы говорили ранее.
Есть разница только в одном аспекте: в настоящем устройстве магнитов очень много. Они расположены на одном диске.
Численность полюсов в нынешних двигателях достигает сорока восьми. Одна поступь в данном моторе равен семь с половиной градусов. Неплохо, да?
Шаговые двигатели с альтернирующим магнитным противодействием. Такой тип ротора в своей конструкции имеет мягкие магнитные сплавы, их так же именуют «реактивными шаговыми моторами».
Ротор состоит из дискретных пластин и в разрезе имеет вид зубчатого колеса.
Подобная схема строения нужна с той целью, что это позволяет замкнуть магнитный поток через зубцы колеса.
Преимущество данного типа мотора состоит вот в чем: здесь нет ничего, что затормозило бы работу двигателя. Соль в том, что ротор с установленными магнитами притягивается к частям двигателя, которые состоят из металла.
Обеспечить непрерывную работу шагового двигателя без напряжения практически невозможно. Но данный тип устройства эту проблему решил на корню. Но имеется и слабое место, а именно — маленький крутящий момент. Это значит, что одна поступь такого мотора будет равна от пяти до пятнадцати градусов.
Гибридный тип двигателя соединил оптимальные качества предшествующих. У них маленький шаг ( девять десятых – пять градусов), высокий момент и удерживающая способность. Главной фишкой тут мы считаем максимальную точность работы аппарата.
Этот двигатель используют в новых устройствах, где точность ставят первоочередной задачей. Но, есть одно «но» — цена.
За такое удовольствие придется дорого платить. Схематично такой ротор можно описать как цилиндр с магнитными свойствами, который имеет мягкомагнитные зубцы.
Проследим закономерность на деле: возьмем шаговый двигатель на двести шагов. Для него нужно два зубчатых диска, по пятьдесят зубцов.
Наш диск смещается на ползуба, таким образом, проем положительного полюса попадает на шип негативно заряженного . Итого, оказывается сто полюсов с обратной полярностью.
Методы управления шаговым мотором:
- Волновой. При таком типе управления напряжение поступает на одну из катушек, к ней притягивается ротор. Но такой вариант высокую мощность обеспечить не сможет.
- Полношаговое координирование осуществляется следующим образом: обе обмотки задействованы сразу, соответственно мощность будет высокой.
- Полушаговый. Это смесь из предыдущих двух методов. При таком типе управления напряжение идет поочередно: на одну обмотку, а потом – на обе. Таким образом, мы получим много шагов, высокую мощность, а так же в случае чрезмерного разгоне срабатывает удерживающая сила, которая тормозит мотор, когда это необходимо.
- Микрошаговое управление осуществляется с микроступенчатых импульсов. Это обеспечивает плавную работу мотора.
Плюсы и минусы шаговых моторов
Смело запишем к преимуществам следующее:
- высокие скорости старта, тормоза и реверса;
- вал делает оборот в согласно команде главного устройства на указанный угол;
- точная фиксация позиции после тормоза;
- четкость установки позиции;
- максимальная надежность в связи с отсутствием коллектора;
- обеспечение наибольшего крутящего момента при низких скоростях.

- есть риск изменения позиции в случае перегрузки вала, которая превышает ПДК для шагового мотора;
- риск резонанса;
- трудности в управлении;
- низкая скорость оборотов, хотя это не совсем минус, так так ШД применяют не для обеспечения вращения, а для обеспечения определенных позиций элемента в конкретный момент.
Наш шаговый мотор имеет второе имя, которое дает максимальное описание устройства, а именно: «электродвигатель с конечным числом положений ротора». Их используют в новых устройствах, таких, как 3D-принтеры, роботы, станки.
Конкурентоспособной альтернативой для него есть сервопривод, хотя они оба имеют свою нишу использования, которая определяется случаем.