Холостой шаговый двигатель ремонт
Часто задаваемые вопросы по шаговым двигателям (FAQ).
Содержание
[править] Вопрос: Что такое шаговый двигатель и для чего он?
Ответ: Шаговые двигатели — это устройства, задача которых преобразование электрических импульсов в поворот вала двигателя на определенный угол. В отличие от обычных двигателей, шаговые двигатели имеют особенности, которые определяют их свойства при использовании в специализированных областях: управляя шаговым двигателем с помощью специального устройства (драйвер шагового двигателя), можно поворачивать его вал на строго заданный угол. Это позволяет применять его там, где требуется высокая точность перемещений. Наглядные примеры это принтеры, факсы, копировальные машины, станки с ЧПУ (Числовое программное управление), фрезерные, гравировальные машины, модули линейного перемещения, плоттеры, установщики радиоэлектронных компонентов. Шаговый двигатель является бесколлекторным двигателем постоянного тока. Как и другие бесколлекторные двигатели, шаговый двигатель высоконадежен и при надлежащей эксплуатации имеет длительный срок службы. Далее: подробно о строении шагового двигателя
[править] Вопрос: Какие достоинства у шаговых двигателей?
Ответ: Достоинства истекают из особенностей конструкции: — Шаговый двигатель может обеспечить очень точное перемещение на заданный угол, причем без обратной связи — поворот ротора зависит от числа поданных импульсов на устройство управления; — высокая точность позиционирования и повторяемость, так качественные шаговые двигатели имеют точность не хуже 5% от величины шага, при этом данная ошибка не накапливается; — хорошая надежность двигателя, обусловленная отсутствием щеток, при этом срок службы двигателя ограничивается лишь ресурсом подшипников; — обеспечивает получение сверхнизких скоростей вращения вала без использования редуктора; — работа в широком диапазоне скоростей, т.к. скорость напрямую зависит от количества входных импульсов. Недостатки — шаговый двигатель подвержен резонансу; — может пропустить шаги и реальная позиция вала окажется рассинхронизирована с позицией, заданной в управляющей системе — низкая удельная мощность шагового привода; — потребляемая энергия не уменьшается при отсутствии нагрузки; — малый момент на высоких скоростях;
[править] Вопрос: Какие бывают шаговые двигатели?
Ответ: Шаговых двигателей существует множество разновидностей. В настоящее время 95% всех шаговых двигателей — гибридные. В зависимости от конфигурации обмоток двигатели делятся: а)Биполярный — имеет четыре выхода, содержит в себе две обмотки. б)Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины. в)Четырехобмоточный — имеет четыре независимые обмотки. Можно представлять его как униполярный, обмотки которого разъединены, а если соединить соседние отводы — получим биполярный двигатель.
В зависимости от типа электронного коммутатора управление шаговым двигателем может быть: однополярным или разнополярным; симметричным или несимметричным; ·потенциальным или импульсным. При однополярном управлении напряжение каждой фазе изменяется от 0 до +U, а при разнополярном – от -U до +U. Управление называется симметричным, если в каждом такте коммутации задействуется одинаковое число обмоток, и несимметричным – если разное.
[править] Вопрос: Корпус у меня не разборный, а хочется посмотреть что внутри!
Ответ: Внутри находятся обмотки, зубчатый ротор и несколько подшипников. Не стоит разбирать рабочий двигатель. Ротор устанавливается с малым зазором, кроме того, система ротор-статор образует замкнутый магнитопровод, который намагничивается в собранном состоянии, и двигатель после разборки теряет существенную часть момента.

[править] Вопрос: На какой минимальный угол может повернуться шаговый двигатель?
Ответ: Большинство моделей имеет 200 шагов на оборот, т.е. 1.8 градуса на шаг. Также производятся и можно заказать у нас двигатель с шагом в 0.9 градуса(400 шагов на оборот). Существует также возможность использования микрошагового режима, который позволяет делить шаг без потери точности на 8-10 микрошагов. Это означает, что для двигателя с шагом 0.9 градуса минимальным угла поворота будет примерно 0,09 град = 5.4 угловых минуты. Существуют также драйверы, которые могут делить шаг на 256 и даже 512 микрошагов. Но практическое значение таких делений невелико — во-первых, для совершения каждого микрошага требуется подать отдельный импульс STEP, соответственно, требуется очень высокая частота импульсов, во-вторых, точность перестает расти уже после деления шага на 10-16 частей. Единственным применением таких режимов остается повышение плавности хода двигателя.
[править] Вопрос: Какие существуют программы для работы с шаговыми двигателями?
Ответ: Их существует множетсво как перемещение на определенный шаг, так для трехмерного использования. Могут управлять от одного до шести двигателей. Например MACH3, LinuxCNC, Turbocnc, NC Studio.
[править] Вопрос: Как можно повысить точность вращения вала шагового двигателя?
Ответ: Есть режим дробления шага (микрошаг) реализуется при независимом управлении током обмоток шагового электродвигателя. Управляя соотношением токов в обмотках можно зафиксировать ротор в промежуточном положении между шагами. Таким образом можно повысить плавность вращения ротора и добиться высокой точности позиционирования. Однако, деление шага не всегда приводит к увеличению точности. Погрешность установки вала всегда равна указанному производителем значению (обычно 5% от полного шага), вне зависимости от микрошага. Кроме того, точность установки снижается, если ток в одной из обмоток близок к нулю. В результате точность увеличивает деление шага до примерно 8-10 микрошагов (деление 1/8 или 1/10). Большие значения приводят лишь к увеличению плавности хода.
[править] Вопрос: Что означают характеристики шагового двигателя — ток, индуктивность, напряжение и т.п.?
Ответ: Все характеристики двигателя находятся в тесной взаимосвязи и определяют главную — кривую зависимости крутящего момента от скорости. Рассматривать влияение характеристик надо для двигателей одного размера. Момент удержания — пиковое значение крутящего момента двигателя — зависит от тока и индуктивности обмотки. Чем больше индуктивность, тем больший момент удержания можно развить, но тем больше требуется напряжение питания на высоких скоростях, чтобы преодолеть индуктивное сопротивление и закачать нужный ток в обмотку. Ток обмотки также определяет выбор драйвера шагового двигателя. Напряжение питания обмотки равно U = I*R, номинальному току обмотки умноженному на напряжение и показывает, какое постоянное напряжение надо подать на обмотку, чтобы получить номинальный ток и, соответственно, момент удержания. Величина напряжения используется при выборе драйвера и характеристик источника питания.
[править] Вопрос: Какой шаговый двигатель лучше, А или Б?
Ответ: Этот вопрос неоднозначен, но все же дадим пару рекомендаций. Как правило, ориентироваться надо не на момент удержания, а на индуктивность. Лучше работают те двигатели, у которых индуктивность меньше — большинство задач требуют момента на высоких скоростях, и малая индуктивность требует меньшего напряжения питания. Нормальной индуктивностью можно считать 2-5 мГн для двигателей NEMA23 (фланец 57 мм), 4-6 мГн для двигателей NEMA34 (фланец 86 мм). Если А и Б — двигатели разного размера, смотрите кривую зависимости момента от скорости — чем она более пологая, тем лучше. См. более подробный алгоритм выбора шагового двигателя.
[править] Вопрос: Что такое драйвер управления шаговым двигателем?
Ответ: Драйверы шаговых двигателей используются для управления биполярными и униполярными шаговыми двигателями с полным шагом, половинным и микрошагом. Они действуют как посредники между компьютером и двигателем и должны подбираться по напряжению и уровню мощности, типу сигнала (аналоговый и цифровой). Тип двигателя является самым важным фактором при выборе драйвера. В униполярном или биполярном двигателе ток проходит только в одном направлении по обмотке. Биполярные шаговые двигатели имеют две обмотки через которые ток проходит поочередно. Шаговые двигатели с полным шагом приводятся в движение благодаря изменениям магнитного поля относительно ротора. Полушаговые двигатели в свою очередь действуют также, как двигатели с полным шагом однако угловое перемещение ротора составляет половину шага полношагового двигателя. На каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две. В результате угловое перемещение ротора составляет половину угла. Микрошаговые или минишаговые двигатели отличаются дискретным числом угловых перемещений угловых положений между каждым полным шагом. В драйверах минишаговых и микрошаговых двигателей используются электронные методы улучшения позиционного решения системы управления. Драйверы шаговых двигателей отличаются по электрическим характеристикам, параметрам управления, размерам и техническим характеристикам. Электрические характеристики включают в себя максимальное напряжение на входе, номинальную мощность, силу тока на выходе, максимальная сила тока на выходе, питание переменным и постоянным током. Драйверы для шаговых двигателей могут быть однофазными или трех фазными с частотой в 50, 60, или 400 Гц. Параметры управления включают в себя особенности установки и управления. В некоторых драйверах используются ручные средства управления типа кнопок, DIP-переключателей или потенциометров. В других используются джойстики, цифровые пульты управления, компьютерные интерфейсы, или слоты для карт PCMCIA (Международная ассоциация производителей карт памяти для персональных компьютеров). Программы контроля могут быть сохранены на передвижных, энергонезависимых носителях данных. Переносные блоки управления разработаны для управления с удаленных точек. Также доступно беспроводное и WEB управления. Форма драйверов позволяет сборку модуля в нескольких конфигурациях. Большинство устройств могут монтироваться на шасси, контактные DIN рельсы, панели, стойки, стены или печатные платы (PCB). Также возможна установка автономных устройств и интегральных микросхем, которые монтируются на печатные платы. Особенности драйверов: подавление резонанса; вспомогательные входы/выходы (I/O); мягкий старт; автонастройка, самодиагностика и проверка состояния; а так же сигнализация в таких случаях как перенапряжение. В драйверах используют много различных типов шин и коммуникационных систем. Шинные типы: (ATA), (PCI), (IDE), (ISA), (GPIB), (USB) и (VMEbus). Коммуникационные стандарты: ARCNET, AS-i, Beckhoff I/O, CANbus, CANopen, DeviceNet, Ethernet, (SCSI) и (SDS). Также доступно большое количество последовательных и параллельных интерфейсов. Соответствующая статья поможет подобрать драйвер биполярного двигателя для станка с ЧПУ,
[править] Вопрос: Как узнать, подходит ли двигатель А к драйверу Б
Ответ: Чтобы это узнать, сделайте следующее: 1) проверьте, может ли драйвер выдавать ток фазы, равный(или примерно равный)току, указанному производителем двигателя. Если ток драйвера заметно меньше тока фазы двигателя — драйвер не подходит. 2) Вычислите максимальное напряжение питания двигателя по формуле Umax = 32 * sqrt (L), где L — индуктивность обмоток двигателя в миллигенри(указывается производителем). Желательно, чтобы максимально допустимое напряжение питания драйвера было примерно равно этому значению, или было немного больше. Если это условие не выполняется, то скорее всего двигатель вращаться будет, но больших скоростей достичь не удастся. Пример:подходит ли драйвер PLD545-G3 для двигателя PL86H151? Ток обмотки двигателя — 4.2 А, ток, выдаваемый драйвером — до 5А, первое условия выполнено. Индуктивность двигателя — 12 мГн, по формуле получаем Umax = 32 * sqrt(12) = 110 Вольт. Максимальное напряжение питания драйвера — 45 Вольт. Это означает, что двигатель будет отдавать момент только на низких оборотах, а для получения качественного движения необходимо использовать или драйвер с напряжением питания до 80 Вольт(например, PLD86 или PLD880), или двигатель с меньшей индуктивностью.
[править] Вопрос: У меня перегревается двигатель, что делать?
Ответ: Для начала надо определить, действительно ли двигатель перегревается. Многие воспринимают рабочую температуру двигателя как перегрев, потому что её «не терпит рука», тогда как нагрев в 80 градусов — нормальное явления для шагового двигателя. Поэтому необходимо замерить реальную температуру. Если она меньше 80 градусов — беспокоиться не стоит. Если больше — первое, что необходимо проверить, это выставленный рабочий ток на драйвере. Он должен соответствовать номинальному току двигателя. Также можно использовать функцию снижения тока обмоток в режиме удержания. К снижению нагрева приводит также снижение питающего напряжения, однако, и момент тоже снизится. Если нет возможности жертвовать динамикой двигателя, остается единственный способ — установить на корпус ШД радиатор и/или вентилятор.
[править] Вопрос: Шаговый двигатель постоянно пропускает шаги. Что делать?
Ответ: Пропуск шагов — самая неприятная проблема у шаговых приводов. Причин может быть множество. В порядке убывания распространенности:
- Некачественный блок управления двигателем. Не стоит недооценивать сложность управления шаговым двигателем. Разница в работе драйвера Leadshine и кустарной поделки — очень велика. Особенно это заметно при работе в области резонанса.
- Неверные настройки драйвера. Неверно выбранное напряжение питания, ток — могут приводить к пропуску шагов. Проверьте все настройки еще раз.
- Двигатель перегружен. Нагрузка на двигатель слишком велика. Снизьте скорость или поставьте двигатель побольше.
- Механическая часть(направляющие, передачи) подклинивает
- Бракованный двигатель. Прозвоните обмотки, проверьте их сопротивление(должно совпадать с паспортным). Проверьте вращение вала рукой — при разомкнутых обмотках вал отключенного двигателя должен вращаться легко и беззвучно, при замкнутых накоротко вал крутиться не должен.
- Дребезг на контактах управляющих сигналов STEP/DIR
- Проблемы с генерацией сигналов STEP/DIR. Это целое отдельное семейство проблем, которое достойно отдельного обсуждения.
- Иногда за пропуск шагов принимают проскальзывание шестерни на валу или муфты, соединяющей вал двигателя с винтом передачи.
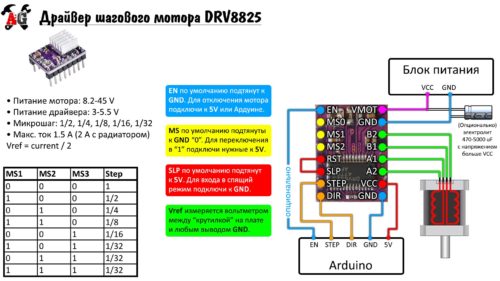
Обзор драйвера шагового двигателя DRV8825
Признаки неисправности
Стоит отметить, что ЭБУ, как правило, не сообщает о неисправности регулятора холостого хода, поэтому CHECK может не сигнализировать о проблемах с этой деталью. Необходимость ремонта (замены) РХХ можно определить по следующим признакам:
- Слишком высокие обороты холостого хода даже на прогретом двигателе;
- Слишком малые обороты, которые приводят к существенной вибрации мотора или полной его остановке;
- Невозможность запустить двигатель без нажатия на педаль газа;
- Отсутствие стабильности оборотов мотора. Обороты плавают;
- При разгоне и переключении передач, в момент отпускания педали газа обороты существенно возрастают и лишь через несколько секунд приходят к норме;
- При включении дополнительного оборудования (лампы, магнитола) двигатель глохнет.
Сервопривод
Сервопривод, как мы уже сказали ранее — это обычный мотор с дополнительно установленным датчиком контроля, выполняющим функцию обратной связи.
При работе мотор будет удерживаться в заданном положении с помощью контроллера. Такой принцип взаимосвязи позволяет добиться высокой скорости и точности оборудования вплоть до одного микрона.
Если на обычный электродвигатель подать напряжение, он будет вращаться.
Чтобы зафиксировать движение в одном положении и при этом не заставить его двигаться в обратном, контроллер должен постоянно переключать ток двигателя на противоположенный, пока не поступит следующая команда.
При таком подходе пропуск шагов исключен, так как энкодер постоянно отслеживает отклонения вала и корректирует ошибку, меняя каждый раз направление движения двигателя.
- дорогостоящий ремонт;
- высокая стоимость.

Конструкция и принцип работы
На 14-ом ВАЗе применяется датчик холостого хода с электродвигателем шагового типа. Также в его конструкции имеется конусная игла, работающая в паре с пружиной. Данная игла обеспечивает дозировку поступающего воздуха в узел дроссельной заслонки.

1-калапан; 2-корпус; 3-обмотка статора; 4-винт ходовой; 5-контактный вывод обмотки статора; 6-подшипник; 7-корпус обмотки; 8-ротор; 9-пружина.
При включении зажигания автомобиля клапан (1) полностью выдвинут и перекрывает отверстие, находящееся в дроссельном канале. Далее регулятор проводит расчёт шагов, возвращая клапан в первоначальное положение.
Исходное положение клапана регулятора холостого хода на автомобилях семейства ВАЗ зависит от типа прошивки, установленной в ЭБУ. Оно составляет 50 шагов для прошивки Bosch и 120 шагов для прошивок типа ЯНВАРЬ 5.1.
С изменением количества шагов датчика, количество воздуха, проходящего через дроссельный канал, уменьшается или увеличивается. Вытянутый клапан характеризуется большим количеством шагов и меньшим объемом проходящего воздуха. Втянутый клапан соответственно наоборот.
Для автомобиля ВАЗ 2114 расстояние от головки клапана (штока) до фланца корпуса составляет не более 23 миллиметров. Это нужно учесть при покупке нового регулятора.

Следим, чтобы данное расстояние было не больше 23 мм.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.

С переменным магнитным сопротивлением
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.

С постоянным магнитом
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.

Устройство гибридного шагового двигателя
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:

Расположение пазов гибридника
Из-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.

Рис. 6. Принцип работы гибридного ШД
За счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.

Униполярный ШД
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.

Схема а) с различными, б) с одним выводом
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.

Биполярный шаговый двигатель
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.




Проверка датчика
Для проверки исправности РХХ необходим тестер. Проделайте следующие шаги:
-
Отключите колодку проводов от разъема датчика. Колодка состоит из четырёх контактов ABCD. Последовательность этих контактов указана на самой колодке.

Расположение обмоток РХХ ВАЗ 2114

Проверка регулятора холостого хода ВАЗ 2114
Видео по теме:
На этом всё. Надеемся данный материал принес вам практическую пользу, а ваш ВАЗ 2114 снова в строю и надежно выполняет свою функцию.
2111 8кл.позиция шагового двигателя 140.что это значит.троит
Не работает панель приборов
by Adminrive · Published 23.06.2015
На мой взгляд четырка смотрится круче чем Приора Универсал как считаете на
by Adminrive · Published 27.04.2016
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата. При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:

Схемы подключения различных типов шаговых двигателей
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
Библиотека для шагового двигателя Arduino v1.15
ОБНОВЛЕНИЯ
- v1.13 – исправлены мелкие баги, оптимизация
- v1.14 – исправлены ошибки разгона и торможения в KEEP_SPEED
- v1.15 – оптимизация, исправлены мелкие баги, stop() больше не сбрасывает maxSpeed
ТЕОРИЯ
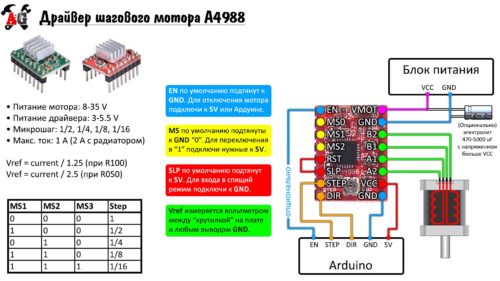
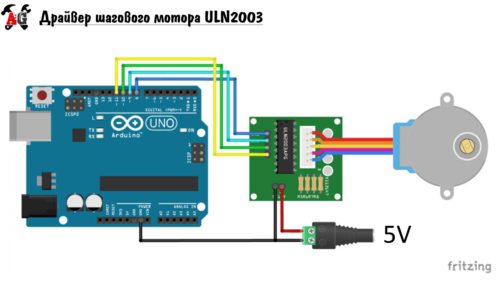
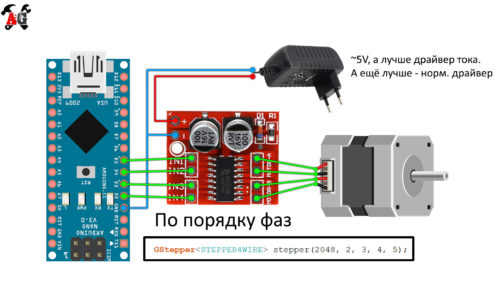
Для подключения шаговых моторов к Arduino нужно использовать драйверы. Очень дешёвые и популярные моторы 28byj-48-5v часто продаются вместе со своим драйвером (транзисторная сборка ULN2003), подключить можно к любым 4-м пинам Ардуино и использовать.
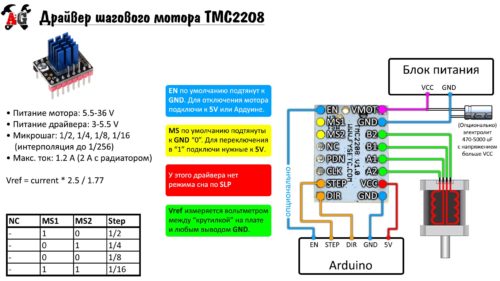
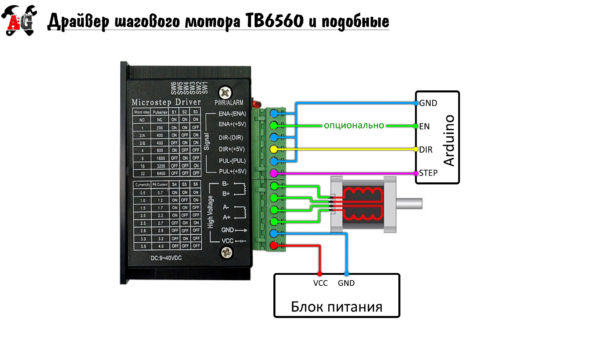
Для работы с большими шаговиками (типа Nema 17) нужно использовать специализированные драйверы, ниже вы найдёте описания и схемы подключения для A4988, DRV8825 и TMC2208, драйверы такого формата подключаются и работают практически одинаково, т.к. разработаны для CNC шилдов и взаимозаменяемы. У этих драйверов нужно настроить ток при помощи крутилки на плате. Это можно сделать “на глаз”, заставив мотор вращаться и регулируя крутилку. Мотор должен вращаться, но не вибрировать как перфоратор и сильно не нагреваться. Лучше настроить ток по опорному напряжению Vref, у каждого драйвера оно считается по своей формуле (см. картинки ниже). Берём ток своего мотора из описания, подставляем в формулу вместо current, считаем, и накручиваем полученное напряжение крутилкой. Для измерения опорного напряжения нужно подключить щупы вольтметра к самой крутилке и пину GND.
Главное преимущество дорогущих драйверов TMC – отсутствие шума/свиста/вибраций при работе, так как драйвер своими силами интерполирует сигнал до микрошага 1/256.
БИБЛИОТЕКА
GyverStepper v1.15
Производительная библиотека для управления шаговыми моторами с Arduino
- Поддержка 4х пинового (шаг и полушаг) и STEP-DIR драйверов
- Автоматическое отключение питания при достижении цели
- Режимы работы:
- Вращение с заданной скоростью. Плавный разгон и торможение с ускорением
- Следование к позиции с ускорением и ограничением скорости
- Следование к позиции с заданной скоростью (без ускорения)
- Быстрый алгоритм управления шагами
- Два алгоритма плавного движения
- Мой планировщик обеспечивает максимальную производительность: скорость до 30’000 шагов/сек с ускорением (активен по умолчанию)
- Модифицированный планировщик из AccelStepper: максимальную плавность и скорость до 7’000 шагов/сек с ускорением (для активации пропиши дефайн SMOOTH_ALGORITHM)
- Поддержка “виртуальных” драйверов
Совместимость
Совместима со всеми Arduino платформами (используются Arduino-функции)
Холостой шаговый двигатель ремонт
Пыжик принёс мне подарочек: Полностью отказавшись работать
на холостом ходу. То есть совсем. Мотор исправно заводился, нормально ехал,
но стоило нажать сцепление или выключить передачу, как мотор сразу глох.
Отъездив так денёк, вечером добрался до гаража. Диагностика была недолгой.
Сняв детали 7 и 6, добравшись до блока дроссельной заслонки.
Все команды компьютера регулятор выполнял одинаково — только вперёд.
Датчик я заказал, привезут через 4 дня. Но ездить как-то надо.
Поступил просто. Выставил шток руками «на глазок». Поставил датчик на место.
Штекер снял. Естественно, холостой ход появился. Где-то 900-1000 оборотов.
Но поскольку регулятор не работал, обороты плавали. Машина сама нервно пригазовывала,
порой до 1800 — 2000, но мотор не глох.
Появилась мысль заодно и почистить систему холостого хода, о чём вам здесь
и докладываю. Итак:
Симптомы:
— Плавают обороты холостого хода.
— Обороты холостого хода каждый раз разные. На одном светофоре 800, на другом 750.
— Мотор медленно сбрасывает обороты, когда отпущена педаль газа.
— Мотор сильно сбавляет обороты, когда включается кондиционер, и нехотя их набирает.
Диагноз:
— Засорился канал холостого хода
— Уменьшилась подвижность штока датчика холостого хода из-за грязи и отложений.
Решение:
Инструмент: Отвёртка и Набор ключей Торкс


Время работы: 15-20 минут
Работа показана на примере,естественно , 2-х литрового мотора.
Снимаем гофру, соединяющую воздушный фильтр с воздуховодом-крышкой дроссельной
заслонки. Там 2 хомута. Можно снять один конец гофры, но лучше всю. Мешаться будет.







Отчего же она пачкается, ведь воздух поступает в двигатель через фильтр?
Обратите внимание на штуцер от трубки вентиляции картера. По этой трубке поступают
картерные газы для дожигания. Экология.
Газы содержат пары и капли масла, которые оседают на заслонке и в канале холостого хода.
А штуцер, как раз, напротив канала холостого хода. Он страдает в первую очередь.
Теперь приступаем непосредственно к чистке. Операция не сложная, но требует аккуратности.
На закрытую заслонку брызгаем очистителем. Осторожно, струя достаточно сильная.
Брызгает во все стороны.





. ключиком Торкс откручиваем два винта и снимаем регулятор холостого хода.
ВНИМАНИЕ! Там есть резиновое колечко. Не потеряйте.
Открыв заслонку, закрываем пальцем с тряпкой отверстие воздушного канала холостого хода.




. и можно всё собирать.
Наслаждаемся, как чётко работает двигатель.
Такую промывку стоит проводить примерно раз в год.
—————————————————————-
Теперь, если регулятор не работает. Как проверить?
Снять датчик, как это было показано выше. Подсоединить к нему разъём.
Положить/повесить датчик так, чтобы его было видно из салона (в щель под открытым капотом).
Включить зажигание. Шток датчика должен выдвинуться примерно на 5 мм.
Выключить зажигание — шток должен задвинуться на те же 5 мм.
Мой датчик двигался только вперёд. Поэтому я его заменил на новый:

Но шток нового датчика практически полностью убран. Не удивительно, что после сборки,
мотор взревел оборотами 2000-2500. Как быть? Помня, как датчик реагирует на включение-выключение
зажигания Поступаем так:
— Одеваем разъём
— Включаем зажигание (шток выдвигается)
— Снимаем разъём
— Выключаем зажигание (шток остаётся выдвинутым)
Если снимать разъём до включения зажигания, и одевать
перед выключением, то можно отодвинуть шток назад.
Через пару таких манипуляций добиваемся нормального положения штока регулятора.
Если мотор долго сбрасывает газ, после отпускания педали, то шток нужно чуть выдвинуть.
Если при нажатии на газ появляется сильный провал — задвинуть.