Электрическая схема контроллера двигателя bafang
Назначение контроллера для электровелосипеда, устройство, принцип работы

В каждом велосипеде электрическом обязательным элементом является контроллер, отвечающий за работу двигателя.
Технический прогресс способствовал созданию современных его видов, которые коренным образом отличаются от предшественников, напоминавших массивный реостат. В них нет движущихся частей, а передача к мотору электроэнергии регулируется длительностью поступающих импульсов.
Как работает котроллер
В основном это устройство предназначено для подачи на мотор-колесо поступающей от батареи аккумуляторной энергии. Магнитное поле, создаваемое током, протекающим по обмоткам, отталкивает и притягивает магниты ротора, что приводит колесо в движение. Основная задача контроллера — управление частотой вращения двигателя велосипеда. Но у него есть другие дополнительные функции, которые можно разделить на:
- Регулирование скорости вращения двигателя.
- Управление крутящим моментом.
- Защита двигателя.

Контроллером принимается сигнал от ручки акселератора. На основе принятой информации, осуществляет регулирование скорости вращения двигателя. Быстро раскручивая двигатель, очень важно, чтобы также быстро его можно было, при необходимости, остановить. Чтобы двигатель служил дольше, требуется плавное и мягкое торможение, методом изменения длительности импульсов, что входит также в функции этого прибора. Очень полезно иметь возможность реверса, т.е. обратного хода. Более совершенные модели этих приборов имеют возможность подачи на мотор напряжения противоположной основной полярности, обеспечивая тем самым оптимальный режим изменения вращения двигателя. Регулирование заднего хода, для обеспечения безопасности, происходит на низких оборотах.
Очень важно для любого велосипеда с электромотором, чтобы контроллер мог определять уровень напряжения в батареях и, при его падении ниже порогового значения, мог отключить двигатель от питания. Пороговым значением считается величина 87,5%. В моделях современных, наиболее продвинутых, порог отключения можно настроить под конкретный тип батарей, используемых в велосипеде, защитив их, таким образом, от чрезмерной разрядки.
Следить за температурой контроллер может благодаря установленному в нем термодатчику, чем предотвращает в электросистеме велосипеда токовую перегрузку.
Помимо мотор-колеса к нему подсоединены и все другие комплектующие велосипеда, для подключения которых предназначены высококачественные многожильные соединительные провода, защищенные силиконовой термостойкой изоляцией.
Ряд важных параметров, таких как, например, напряжение батарей, максимальный рабочий ток и пр., определяют с какими аккумуляторами и электрическими моторами могут работать контроллеры.
Универсальный контроллер «Volta bikes»

Можно ли отремонтировать контроллер?
Одной из немногочисленных поломок, которая может случиться с электрическим велосипедом, является выход из строя этого элемента. Что рекомендуется предпринять в этом случае?
Прежде всего, сняв контроллер, нужно определить, подлежит ли он ремонту, что легко сделать, просто взглянув на них: внешний вид подскажет, какая деталь требует замены. Если ремонт возможен, нужные запчасти спросить можно в магазине велотехники или на радиорынке.
Если отремонтировать контроллер уже не представляется возможным, его придется заменить. Сделать это можно, вновь-таки, посоветовавшись с продавцами этого транспорта, потому что, даже при внешней схожести прибора и совпадении разъемов, предназначенных для подключения соответствующих компонентов, контроллеры, выпущенные различными производителями, по- разному могут быть «прошиты». Касаться различия могут и других показателей. Чтобы получить максимальный коэффициент полезного действия двигателя, нужен штатный контроллер, предназначенный для работы с ним или же универсальный, рассчитанный на напряжение 24, 36, 48 V и мощность, лежащую в пределах 200-1000 Вт. Приятным моментом является то, что их стоимость практически одинакова.

Контроллеры: стандартный (штатный) и универсальный
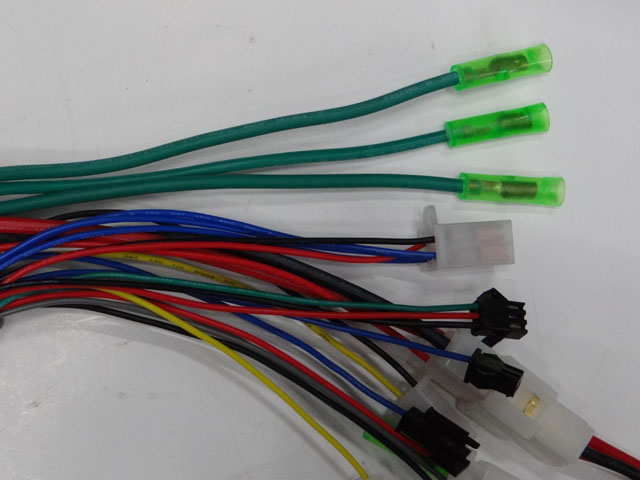
Универсальные Volta bikes внешне незначительно отличаются от штатных, в которых на мотор питание подается по окрашенным в желтый, зеленый и синий цвета проводам. В ремонтном же – они все зеленого одинакового цвета. Здесь не имеет значения порядок их подключения из-за того, что настройки отсутствуют до момента подключения к двигателю
Стандартный контроллер и универсальный
Два провода дополнительных синего цвета, имеющиеся в ремонтном варианте Volta bikes, могут быть соединены вместе при помощи одноконтактного разъема. Они служат для настройки фазировки. После установки на велосипед этой важной детали, к ней подключают все компоненты электронные. Затем несколько секунд проводки замыкают. Как только напряжение подано на мотор-колесо, оно должно самостоятельно сделать несколько оборотов. Если правильно сделано все, то так и произойдет. Теперь синие провода нужно рассоединить, поскольку они уже не нужны. Прибор к работе готов.
Мотор-колесо 250 Вт 36 В Bafang для переднего колеса электровелосипеда

В состав предлагаемого комплекта мотор-колесо входит:
— Двигатель 250 Вт 36В Bafang для переднего колеса, заспицованный в обод нужного Вам размера;
— Мультифункциональный дисплей задания режимов поездки и контроля состояния поездки;
— Контроллер управления двигателем на напряжение 36В;
— Датчик вращения педалей, необходимый для включения помощи двигателем. Это так называемый режим PAS-Pedal Assist System;
— Курок ГАЗА для установки под правую или левую руку, служащий для управления скоростью велосипеда;
— Ручки тормозов с датчиками срабатывания, или датчики на ручки тормозов , имеющиеся на Вашем велосипеде. Датчики на ручках тормозов необходимы для отключения двигателя во время торможения на большой скорости с блокировкой колеса;
— Специальный защитный пластиковый бокс для контролера, c креплением на подседельной трубе велосипеда. По Вашему желанию бокс может быть заменен специальной защитной сумкой с креплением на раме велосипеда.
Редукторный двигатель этого мотор-колеса изготовлен лидером по производству редукторных двигателей — компанией BAFANG (bafang-e.com/home/). Продукция BAFANG по надежности и качеству считается лучшей.

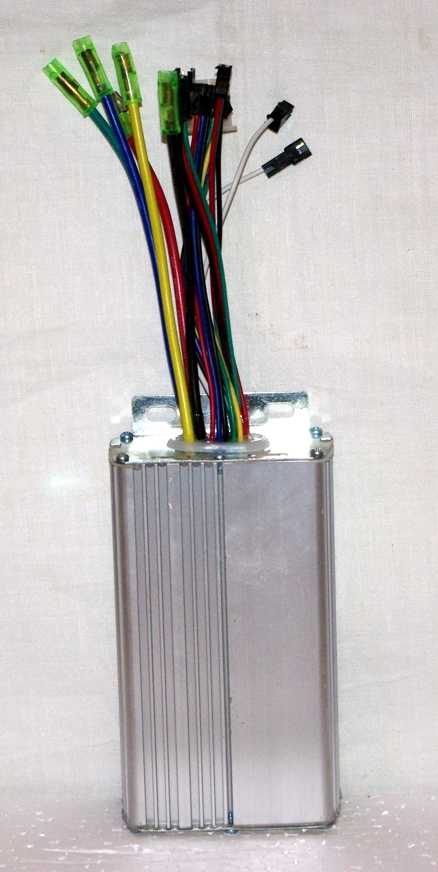
Контроллер управления на напряжение 36 В. Контроллер является специализированным микропроцессорным устройством работающим по программе, записанной в постоянное запоминающее устройство микропроцессора.
Конструктивно контроллер выполнен в пылезащищенном алюминиевом корпусе. Корпус контроллера одновременно является теплоотводом для силовых ключей коммутирующих обмотки двигателя велосипеда. При большой нагрузке контролер может нагреваться, поэтому при размещении контроллера на велосипеде рекомендуется обеспечить его охлаждение.
Контроллер подключен:
— к дисплею управления и контроля параметров поездки;
— к тремя фазными обмоткам двигателя;
— к четырем датчикам Холла расположенными в двигателе (три датчика положения ротора и один датчик скорости вращения);
— к датчику Холла в курке «ГАЗА»;
— к датчику вращения педалей;
— к датчиками положения ручек тормозов;
— к силовой литий ионной батарее электровелосипеда.

Курок «ГАЗА» .
Курок предназначен для управления скоростью электровелосипеда. Скорость зависит от угла поворота курка. Чем на больший угол Вы поворачиваете курок большим пальцем правой или левой руки, тем больше скорость велосипеда. От угла поворота курка зависит напряжение посылаемое датчиком Холла в контроллер, что напрямую отражается на управлении двигателем.
Конструктив курка «ГАЗА» универсальный, что позволяет его устанавливать под праую или левую руку. В отличие от ручки «ГАЗА» применяемой раньше, курок значительно удобнее и безопаснее в эксплуатации. Он позволяет разгрузить руку и исключить случайные срабатывания двигателя при перемещении и поворотах велосипеда в пешем порядке.

Ручки тормозов с датчиками срабатывания.
Датчики ручек тормозов подключены к контроллеру. По сигналу датчиков расположенных в ручках, контроллер отключает питание двигателя для повышения эффективности торможения и исключения повреждения двигателя, при торможении на большой скорости с блокировкой колес.

Если на Вашем велосипеде установлены ручки тормозов, сблокированные с переключателем скоростей или у Вас гидротормоза, рекомендуем установить специальные датчики на имеющиеся ручки тормозов. Датчик представляет собой геркон в корпусе и магнит. Магнит устанавливается на подвижной стороне ручки тормоза, а геркон на неподвижной стороне корпуса ручки. Крепление обоих частей осуществляется на двухсторонний скотча.

Мультифункциональный дисплей управления параметрами поездки и контроля текущих параметров.
Дисплей представляет собой микропроцессорное устройство, связанное по интерфейсу UART с котроллером, что позволяет контроллеру и дисплею обмениваться текущими телеметрическими данными.
С помощью дисплея задается 16 параметров поездки, в том числе включение и выключение электровелосипеда. Отображается 16 текущих параметров. Управление осуществляется с помощью четырех кнопок на передней панели дисплея. В длительных поездках имеется возможность задания режима «круиз контроль».
С помощью дисплея производится также включение передней светодиодной фары и заднего красного фонаря.

Датчик вращения педалей,
для реализации режима помощи двигателем (PAS-Pedal Assist System).
Датчик представляет собой пластиковый диск с 5-8 магнитами, установленный на оси каретки электро велосипеда, и датчика Холла установленного вблизи диска с магнитами. При вращении педалей, ось каретки поворачивается, и магниты проходят вблизи датчика Холла. Импульсы напряжения формируемого датчиком поступают в контроллер, который реагирует на это заданным образом — включая или отключая двигатель на заданную мощность.

Защитный пластиковый бокс для контролера, c креплением на подседельной трубе велосипеда.
Бокс предназначен для защиты контроллера от попадания грязи и воды на контроллер и коннекторы контроллера. В боксе имеется специальная планка для фиксации всех проводов. Крепление бокса с контроллером производится на подседельную трубу. Размеры бокса позволяют разместить контроллеры до 25A.
Создание и тестирование бесколлекторного мотора
Обратившись в , вы можете заказать такую услугу, как перемотка электромоторов в Москве. Процедура предполагает полную замену проводника, целостность и физико-технических характеристики которого повреждены в результате эксплуатации агрегата.
Наши специалисты проводят перемотку эл моторов с применением самого современного оборудования как на объекте заказчика, так и с доставкой двигателя в наш ремонтный цех. При этом у нас вы можете заказать срочный ремонт электромотора мощностью до 55 кВт всего за один рабочий день.
— На 60 V скорость = 84.8км/час
Тесты мотора Бафанг 8FUN 36В 350 W (13) передний . АКБ Дельта 8А12В — 3шт.
Тесты мотора Бафанг Задний ВРМ 36В500W. АКБ Дельта 8А12ВхХ
— Максимальная скорость 59 км./час. — Максимальный ток от аккумуляторной батареи 0,85 Ампера. (без нагрузки)
Процесс [править]
- Аккуратно снимаем старую обмотку, подсчитывая и записывая
количество витков. - Смотрим и записываем
количество проводников в параллель (заводская обмотка мотается жгутом). - На одном проводнике снимаем аккуратно лак (обжиганием в пламени и «нулевкой»).
- Микрометром измеряем и записываем
диаметр жилы. - Смотрим PDF Медные обмоточные провода и ищем соответствие измеренного ближайшему табличному в большую сторону (чтобы максимально нивелировать погрешность при замере диаметра) и записываем
. - Вычисляем и записываем
сечение проводника по формуле площади круга. - Вычисленное сечение умножаем на к-во проводников в жгуте, записываем
. - Опять же по формуле площади круга по суммарному сечению вычисляем диаметр проводника будущей обмотки, записываем
. - По таблице диаметров обмоточных проводников находим ближайшее соответствие в большую сторону, записываем
.
На малых двигателях достаточно 2 м провода на фазу, провод желательно выбирать в двойном слое лака, обращаем внимание на максимальную температуру проводника.
Количество витков, например, для двигателей Pilotage DT3007/30 Delux зашифровано в обозначении — DT3007/30 — цифра 30 говорит о 30 витках на сторону, 15 витках на зуб. Для данного двигателя диаметр провода — 0,3 мм.
Если измеренный
диаметр проволоки 0.3 мм — не нужно покупать проволоку ПЭТВ-2 0.3, т.к. в наименовании проволоки 0.3 — это диаметр медной жилы, а там ещё есть лаковая изоляция, так что у ПЭТВ-2 0.3 диаметр оказывается 0.4 мм!
— На 48 вольт скорость = 85,5км/час видео
Скорость Старт-Шоссе на прямой до 62 км/час. на свинце 48 вольт.
Как определить сгорел мотор или нет?
Определить это не сложно, просто подключите и попробуйте дать газу, если вы наблюдаете признаки, перечисленные ниже, то двигатель у вас точно сгорел:
- мотор дергается;
- вращается, но очень быстро нагревается;
- не подает никаких признаков жизни;
- дымит.
Будьте внимательны, если вы подозреваете, что двигатель у вас поврежден, то лучше подключать его к более мощному регулятору, например на 80 или 100 Ампер. Просто может быть такое, что движок потянет за собой и регулятор, так кстати очень часто и бывает.
Полезные советы [править]
Снятие статора с помощью нагрева и винтов
- Чтобы удобно снять статор, нужно его нагреть примерно до 200° и столкнуть его с места вкрученными заранее в крепёжные отверстиями винтами, подставив между винтами и статором железные пластины, чтобы не испортить его. Получается своеобразный встроенный съемник. [1]
- На пакете железа сверху и снизу нанесено защитное (для провода) покрытие. При разборке бывает что оно повреждается. Восстанавливаем клеем БФ, эпоксидкой, полным снятием покрытия и приклеиванием тонкого стеклотекстолита с последующей обработкой в размер надфилем.
- Наматываем первый слой из середины наружу, плотно, виток к витку, с поджатием витков текстолитовой палочкой для плотности. В первом слое обмотки представленных двигателей умещается 8-9 витков, Мотаем оставшиеся витки вторым слоем плотно, виток к витку.
- Бывает, что соседние уже намотанные обмотки мешают укладывать провод. Смело берите текстолитовую пластину толщиной чуть больше диаметра проводника и прогоняйте ее между обмотками (с торца на торец, вдоль проводников, не поперек!) — проводники подожмутся.
- Чтобы было удобнее наматывать тонкий провод, можно взять цилиндр обычного шприца с укороченной иглой, пропустив провод через иглу. Чтобы не повредить эмаль провода, нужно дополнительно развальцевать и отполировать иглу. Или, как вариант, перед обрезкой иглы загнуть её часть примерно под 45°. А если в шприц натолкать немного ваты, проволока идет с небольшим натяжением, не нужно придерживать пальцами и мотать становится проще.
Создание и тестирование бесколлекторного мотора
В этой статье мы хотели бы рассказать о том, как мы с нуля создали электрический мотор: от появления идеи и первого прототипа до полноценного мотора, прошедшего все испытания. Если данная статья покажется вам интересной, мы отдельно, более подробно, расскажем о наиболее заинтересовавших вас этапах нашей работы.

На картинке слева направо: ротор, статор, частичная сборка мотора, мотор в сборе
Вступление
Электрические моторы появились более 150 лет назад, однако за это время их конструкция не претерпела особых изменений: вращающийся ротор, медные обмотки статора, подшипники. С годами происходило лишь снижение веса электромоторов, увеличение КПД, а также точности управления скоростью.
Сегодня, благодаря развитию современной электроники и появлению мощных магнитов на основе редкоземельных металлов, удаётся создавать как никогда мощные и в то же время компактные и легкие “Бесколлекторные” электромоторы. При этом, благодаря простоте своей конструкции они являются наиболее надежными среди когда-либо созданных электродвигателей. Про создание такого мотора и пойдет речь в данной статье.
Описание мотора
В “Бесколлекторных моторах” отсутствует знакомый всем по разборке электроинструмента элемент “Щетки”, роль которых заключается в передаче тока на обмотку вращающегося ротора. В бесколлекторных двигателях ток подается на обмотки не-двигающегося статора, который, создавая магнитное поле поочередно на отдельных своих полюсах, раскручивает ротор, на котором закреплены магниты.
Первый такой мотор был напечатан нами 3D принтере как эксперимент. Вместо специальных пластин из электротехнической стали, для корпуса ротора и сердечника статора, на который наматывалась медная катушка, мы использовали обычный пластик. На роторе были закреплены неодимовые магниты прямоугольного сечения. Естественно такой мотор был не способен выдать максимальную мощность. Однако этого хватило, что бы мотор раскрутился до 20к rpm, после чего пластик не выдержал и ротор мотора разорвало, а магниты раскидало вокруг. Данный эксперимент сподвиг нас на создание полноценного мотора.
Несколько первых прототипов
Узнав мнение любителей радиоуправляемых моделей, в качестве задачи, мы выбрали мотор для гоночных машинок типоразмера “540”, как наиболее востребованного. Данный мотор имеет габариты 54мм в длину и 36мм в диаметре.
Ротор нового мотора мы сделали из единого неодимового магнита в форме цилиндра. Магнит эпоксидкой приклеили на вал выточенный из инструментальной стали на опытном производстве.

Статор мы вырезали лазером из набора пластин трансформаторной стали толщиной 0.5мм. Каждая пластина затем была тщательно покрыта лаком и затем из примерно 50 пластин склеивался готовый статор. Лаком пластины покрывались чтобы избежать замыкания между ними и исключить потери энергии на токах Фуко, которые могли бы возникнуть в статоре.

Корпус мотора был выполнен из двух алюминиевых частей в форме контейнера. Статор плотно входит в алюминиевый корпус и хорошо прилегает к стенкам. Такая конструкция обеспечивает хорошее охлаждение мотора.

Измерение характеристик
Для достижения максимальных характеристик своих разработок, необходимо проводить адекватную оценку и точное измерение характеристик. Для этого нами был спроектирован и собран специальный диностенд.

Основным элементом стенда является тяжёлый груз в виде шайбы. Во время измерений, мотор раскручивает данный груз и по угловой скорости и ускорению рассчитываются выходная мощность и момент мотора.
Для измерения скорости вращения груза используется пара магнитов на валу и магнитный цифровой датчик A3144 на основе эффекта холла. Конечно, можно было бы измерять обороты по импульсам непосредственно с обмоток мотора, поскольку данный мотор является синхронным. Однако вариант с датчиком является более надёжным и он будет работать даже на очень малых оборотах, на которых импульсы будут нечитаемы.
Кроме оборотов наш стенд способен измерять ещё несколько важных параметров:
- ток питания (до 30А) с помощью датчика тока на основе эффекта холла ACS712;
- напряжение питания. Измеряется непосредственно через АЦП микроконтроллера, через делитель напряжения;
- температуру внутри/снаружи мотора. Температура измеряется посредством полупроводникового термосопротивления;
Для сбора всех параметров с датчиков и передачи их на компьютер используется микроконтроллер серии AVR mega на плате Arduino nano. Общение микроконтроллера с компьютером осуществляется посредством COM порта. Для обработки показаний была написана специальная программа записывающая, усредняющая и демонстрирующая результаты измерений.

В результате наш стенд способен измерять в произвольный момент времени следующие характеристики мотора:
- потребляемый ток;
- потребляемое напряжение;
- потребляемая мощность;
- выходная мощность;
- обороты вала;
- момент на валу;
- КПД;
- мощность уходящая в тепло;
- температура внутри мотора.
Видео демонстрирующее работу стенда:
Результаты тестирования
Для проверки работоспособности стенда мы сначала испытали его на обычном коллекторном моторе R540-6022. Параметров для этого мотора известно достаточно мало, однако этого хватило, чтобы оценить результаты измерения, которые получились достаточно близкими к заводским.
Затем уже был испытан наш мотор. Естественно он смог показать лучшее КПД(65% против 45%) и при этом больший момент(1200 против 250 г на см), чем обычный мотор. Измерение температуры тоже дало достаточно хорошие результаты, во время тестирования мотор не нагревался выше 80 градусов.
Но на данный момент измерения пока не окончательны. Нам не удалось измерить мотор в полном диапазоне оборотов из-за ограничения мощности источника питания. Также предстоит сравнить наш мотор с аналогичными моторами конкурентов и испытать его “в бою”, поставив на гоночную радиоуправляемую машину и выступить на соревнованиях.
МОДУЛЬ ДРАЙВЕРА МОТОРА BLDC
Эта статья предоставит важную теорию и полезные схемы драйверов двигателей жестких дисков, которые можно заставить крутиться с разной скоростью и разных направлениях, а уж где это использовать — решайте сами. Прежде всего обратите внимание, что обычный двигатель шпинделя жесткого диска (HDD) на самом деле является бездатчиковым трехфазным бесколлекторным двигателем постоянного тока BLDC.

Как следует из названия, в бесщеточном (бесколлекторном) двигателе щетки не используются. Бесщеточный двигатель преодолевает потребность в механическом коммутаторе, меняя настройку на обратную, то есть катушки становятся статором, а постоянные магниты становятся частью ротора. Вращение двигателя достигается за счет изменения направления магнитных полей, создаваемых неподвижными катушками. Поскольку ротор представляет собой постоянный магнит, ему не нужен ток, что устраняет необходимость в щетках и коммутаторе. Чтобы контролировать вращение можно регулировать величину и направление тока в этих неподвижных катушках извне.

Типичный бесколлекторный двигатель постоянного тока с тремя катушками на статоре будет иметь шесть проводов, но в большинстве конструкций три провода будут подключены внутри, а остальные три выходят наружу. Также обратите внимание, что трехфазный бесщеточный двигатель требует трех датчиков Холла для определения положения ротора. В зависимости от физического положения этих датчиков, существует два типа выходных сигналов — фазовый сдвиг 60 ° и фазовый сдвиг 120 °. Комбинируя сигналы трех датчиков Холла, можно определить точную последовательность электронной коммутации. Но в бессенсорном бесщеточном моторе сигналы обратной электродвижущей силы (BEMF) контролируются драйвером для коммутации сигнала вместо положения, определяемого датчиками Холла. Вот поперечное сечение трехфазного бесщеточного двигателя на изображении ниже.

Это 4-х проводный двигатель BLDC от жесткого диска. HDD BLDC имеет четыре соединительных провода вместо трех упомянутых проводов ABC (часто обозначаемых как UVW). И 4-х контактный двигатель BLDC — это обычный трехфазный двигатель BLDC с выведенным центральным отводом. Если у двигателя есть фазы сопротивлением по 1 Ом каждая, то он должен давать 1 Ом от центрального ответвления до каждой фазы, 2 Ом между фазами. Хотя некоторые драйверы двигателей BLDC используют центральный отвод для измерения BEMF для коммутации.

Существует два типа мотора BLDC. Первый имеет встроенные датчики Холла для определения положения ротора, а второй — бессенсорный — не имеет датчика. Коммутация бессенсорного типа обычно основана на BEMF, генерируемой в обмотках статора.
Как запустить двигатель HDD 4-х проводной
Так как можно управлять двигателем HDD BLDC? Чтобы вращать его, нужно контролировать направление и синхронизацию тока в катушках статора, но этот метод управления более сложен. В продаже доступен широкий спектр бессенсорных микросхем драйверов двигателей BLDC, например DRV10866, цена модуля вполне доступная в интернет-магазинах. Двигатель работает с ним довольно хорошо — правда крутящий момент невысокий, что не удивительно, учитывая вход от источника питания 5 В.

DRV10866 — довольно популярная микросхема драйвера трехфазного бесщеточного двигателя без датчиков, интегрированная с шестью МОП-транзисторами с пиковыми токами до 680 мА. Она также предлагает синхронное выпрямление с широтно-импульсной модуляцией (PWM) и бессенсорную запатентованную схему управления обратной ЭДС (BEMF). Но есть и другое решение — универсальная плата драйвера двигателя BLDC для жестких дисков. Плата может использоваться для управления как 3-проводными, так и 4-проводными трехфазными бесщеточными двигателями постоянного тока. Кроме того тут есть несколько полезных опций, таких как управление скоростью и направлением вращения двигателя.
Описание платы драйвера двигателя
Контроллер платы драйвера бесщеточного двигателя 5 В — 12 В постоянного тока для двигателя жесткого диска.
- Подходит для бесколлекторных моторов без датчика.
- Защита от обратного напряжения
- Защита от повышенного тока
- Напряжение привода: 5-12 В
- Рабочий ток: до 1,2 А
- Диапазон скорости: 0-100%
- Управление вращением: CW и CCW
Плата сконструирована так, что требуются проводные соединения только с двигателем и источником питания. Минимальное рекомендуемое Vin составляет 5 В, а максимальное — 12 В постоянного тока. Потенциометр встроенного регулятора меняет скорость двигателя. Кроме того, есть две перемычки для выбора 3-проводного / 4-проводного мотора и выбора прямого / обратного направления. Для нормальной работы все перемычки должны быть установлены. В общем вполне удобное решение для управления трехфазными бессенсорными бесщеточными двигателями.

Плата использует комбинацию стабилизатора напряжения с низким падением напряжения (LDO), микроконтроллера для генерации сигналов с широтно-импульсной модуляцией (PWM) для трехфазного бесщеточного двигателя BLDC. Основная часть — драйвер двигателя — это DRV11873, один трехфазный бессенсорный драйвер BLDC от Texas Instruments. Вот типичная схема включения DRV11873.

16-контактный микроконтроллер (U1) настроен для подачи сигнала ШИМ (чуть ниже 25 кГц) на DRV11873 (U2) с потенциометром (W1) для регулировки скорости мотора путем изменения рабочего цикла ШИМ. Выход сигнала ШИМ может быть отведен от точки пайки, как показано на следующем изображении. Встроенная перемычка P1 соединена с выводом FR DRV11873, так что по умолчанию вывод остается в низком состоянии для вращения вперед (при переставлении вывод поднимается по потенциалу, и двигатель вращается в обратном направлении).

Следующая перемычка P4, подключенная к контакту COM DRV11873, предназначена для выбора 3-проводного / 4-проводного привода. На плате припаяны три дополнительных резистора (R4-R5-R6) для создания виртуального центрального отвода / нейтральной точки (для получения последовательности коммутации) для реализации 3-проводного привода двигателя BLDC.
Если выбирать вариант «сделай сам», стоит отметить, что оба чипа TI (DRV10866 и DRV11873) не сложно собирать. Для упрощения в качестве генератора ШИМ было бы лучше взять таймер 555 как широтно-импульсный модулятор, способный выдавать выходной сигнал примерно 25 кГц с рабочим циклом, который может изменяться от 5% до 95%.
И вот еще одна плата, похожая на описанную, но с небольшими изменениями в компоновке деталей. Микросхема драйвера двигателя — DRV11873, микроконтроллер — STC15W404A, регулятор напряжения — HT7550-1.

В общем найти подходящий драйвер для двигателя жесткого диска или оптического привода вполне возможно, в продаже есть десятки вариантов модулей, просто нужно выбрать правильный.