Что станет с кпд асинхронного двигателя
Потери энергии и кпд асинхронных двигателей
ТЭО.18 (13.04.2020)
ОП.12 Электротехника и электроника
Преподаватель Жерневская И.Е.
Тема: КПД и коэффициент мощности. Способы увеличения. Пуск асинхронного двигателя с короткозамкнутым и с фазным роторами
Цель занятия:Изучить и законспектировать основные понятия темы лекции «КПД и коэффициент мощности. Способы увеличения. Пуск асинхронного двигателя с короткозамкнутым и с фазным роторами»
Задание:
1. Законспектировать и изучить лекцию по теме.
2. Посмотреть презентацию на тему: «Пуск асинхронных двигателей»
(прилагается отдельным файлом)
3. По ссылке просмотреть презентацию на тему: «Электрические схемы пуска асинхронного двигателя с короткозамкнутым ротором»:
4. Дать ответы на контрольные вопросы.
Данилов И. А., Иванов Г. М., Общая электротехника с основами электроники. Стр. 222-230;
6. Подготовить реферат на тему «Способы увеличения коэффициента мощности и коэффициента полезного действия асинхронных двигателей».
Срок выполнения задания — до 16.04.2020!
Обратная связь:
4. Viber (+380713844123)
5. WhatsApp(+380713844123)
Лекция
Тема: КПД и коэффициент мощности асинхронных машин. Пуск асинхронных двигателей с короткозамкнутым и фазным роторами
План лекции
Потери энергии и кпд асинхронных двигателей
Коэффициент мощности асинхронного двигателя — от чего зависит и как изменяется.
Способы увеличения КПД и коэффициента мощности.
Пуск асинхронного двигателя с короткозамкнутым ротором.
Пуск асинхронного двигателя с фазным ротором.

Потери энергии и кпд асинхронных двигателей
В электрическом двигателе, при преобразовании одного вида энергии в другой, часть энергии теряется в виде теплоты, рассеиваемой в различных частях двигателя. В электрических двигателях имеются потери энергии трех видов: потери в обмотках, потери в стали и механические потери. Кроме того, имеются незначительные добавочные потери.
Потери энергии в асинхронном двигателе рассмотрим при помощи его энергетической диаграммы (рис. 1). На диаграмме Р1 — мощность, подводимая к статору двигателя из сети. Основная часть Рэм этой мощности, за вычетом потерь в статоре, передается электромагнитным путем на ротор через зазор. Рэм называется электромагнитной мощностью.
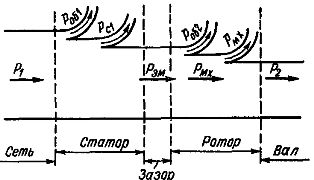
Рисунок 1 — Энергетическая диаграмма двигателя
Потери мощности в статоре складываются из потерь мощности в его обмотке Pоб1 = m1 х r1 х I1 2 и потерь в стали Pс1. Мощность Pс1 является потерями на вихревые токи и на перемагничивание сердечника статора.
Потери в стали имеются и в сердечнике ротора асинхронного двигателя, но они невелики и могут не приниматься во внимание. Это объясняется тем, что скорость вращения магнитного потока относительно статора n во много раз больше скорости вращения магнитного потока относительно ротора n — n, если скорость вращения ротора асинхронного двигателя n соответствует устойчивой части естественной механической характеристики.
Механическая мощность асинхронного двигателя Рмх, развиваемая на валу ротора, меньше электромагнитной мощности Рэм на значение мощности Pоб2 потерь в обмотке ротора:
Мощность на валу двигателя:
где pмх — мощность механических потерь, равная сумме потерь на трение в подшипниках, на трение вращающихся частей о воздух (вентиляционные потери) и на трение щеток о кольца (для двигателей с фазным ротором).
Электромагнитная и механическая мощности равны:
Рэм = ω0M, Рмх = ωM,
где ω и ω — синхронная скорость и скорость вращения ротора двигателя; М — момент, развиваемый двигателем, т. е. момент, с которым вращающееся магнитное поле действует на ротор.
Из этих выражений следует, что мощность потерь в обмотке ротора:

или Pоб2 = s х Pэм
В случаях, когда известно активное сопротивление г2 фазы обмотки ротора, потери в этой обмотке могут быть найдены также из выражения Pоб2 = m2х r2х I2 2 .
В асинхронных электродвигателях имеются также добавочные потери, обусловленные зубчатостью ротора и статора, вихревыми токами в различных конструктивных узлах двигателя и другими причинами. При полной нагрузке двигателя потери Pд принимаются равными 0,5% его номинальной мощности.
Коэффициент полезного действия (КПД) асинхронного двигателя:
η = P2 / P1 = (P1 — (Pоб — Pс — Pмх — Pд)) / P1,
где Роб =Pоб1 + Роб2 — суммарная мощность потерь в обмотках статора и ротора асинхронного двигателя.
Поскольку общие потери зависят от нагрузки, то и КПД асинхронного двигателя является функцией нагрузки.
На рис. 2, а дана кривая η = f(Р/Рном), где Р/Рном — относительная мощность.

Рисунок 2 — Рабочие характеристики асинхронного двигателя
Асинхронный электродвигатель конструируется так, чтобы максимум его коэффициента полезного действия ηmax имел место при нагрузке, несколько меньшей номинальной. КПД двигателя достаточно высок и в широком диапазоне нагрузок (рис. 2, а). Для большинства современных асинхронных двигателей КПД имеет значение 80 — 90%, а для мощных двигателей 90-96%.
Презентация на тему Потери и КПД асинхронного двигателя
Презентация на тему Презентация на тему Потери и КПД асинхронного двигателя из раздела Разное. Доклад-презентацию можно скачать по ссылке внизу страницы. Эта презентация для класса содержит 13 слайдов. Для просмотра воспользуйтесь удобным проигрывателем, если материал оказался полезным для Вас — поделитесь им с друзьями с помощью социальных кнопок и добавьте наш сайт презентаций TheSlide.ru в закладки!
- Главная
- Разное
- Потери и КПД асинхронного двигателя
Слайды и текст этой презентации
Потери и КПД асинхронного двигателя
Преобразование электрической энергии в механическую в АД (как и в других электрических машинах) связано с потерями энергии.
Р2 = Р1 – ∑Р
Р1 – мощность на входе (потребляемая мощность)
Р2 – полезная мощность на выходе
∑Р — потери
Потери Р преобразуются в теплоту, что в конечном итоге ведет к нагреву машины.
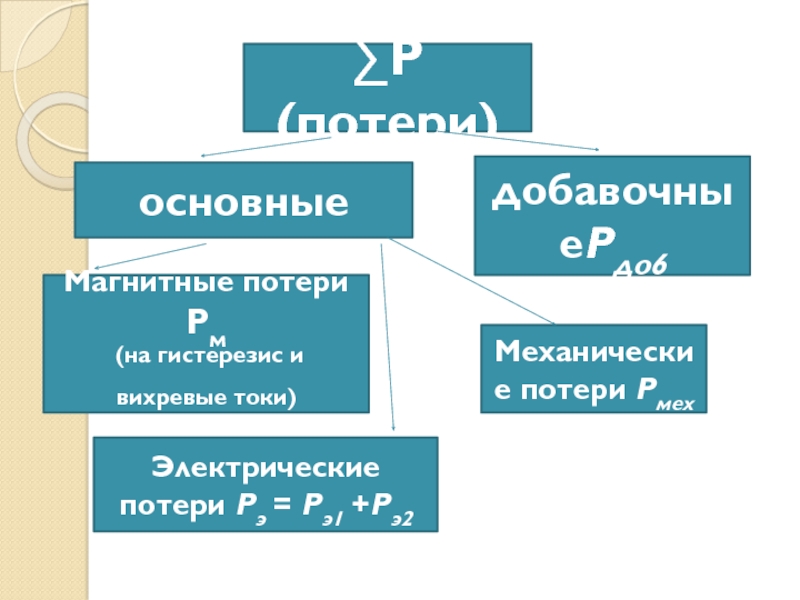
Магнитные потери Рм
(на гистерезис и вихревые токи)
Механические потери Рмех
Электрические потери Рэ = Рэ1 +Рэ2

Величина магнитных потерь пропорциональна частоте перемагничивания Рм = f β,
где β = 1,3 ÷ 1,5.
Частота перемагничивания сердечника статора равна частоте тока в сети (f = f1), а частота перемагничивания сердечника ротора f = f2 =f1s.
При частоте тока в сети f 1 = 50 Гц при номинальном скольжении sном = 1 ÷ 8 % частота перемагничивания ротора f = f2 = 2 ÷ 4 Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают.

Рэ = Рэ1 +Рэ2
электрические потери в обмотке статора
Рэ1 = m1 I21 r1 ; (13.2)
электрические потери в обмотке ротора
Рэ2 = m2 I22 r2 = m1 I′ 21 r′ 1 (13.3)
Электрические потери в роторе прямо пропорциональны скольжению:
Рэ2 = s Рэм (13.5)
где Рэм — электромагнитная мощность АД, Вт:
Рэм = Р1 = (Рм + Рэ1) (13-6)
Из (13.5) следует, что работа асинхронного двигателя экономичнее при малых скольжениях, так как с ростом скольжения растут электрические потери в роторе.
Чем меньше S, тем меньше Рэ
В асинхронных двигателях с фазным ротором помимо перечисленных электрических потерь имеют место еще и электрическиe потери в щеточном контакте Рэ.щ = 3 I2 ΔUщ /2, где Uщ =2,2 В — переходное падение напряжения на пару щеток.
Механические потери Рмех — это потери на трение в подшипниках и на вентиляцию.
Рмех = n22
– (пропорциональны частоте вращения ротора)
В асинхронных двигателях с фазным ротором механические потери происходят еще и за счет трения между щетками и контактными кольцами ротора.
Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах и другими причинами.
В соответствии с ГОСТом
Рдо6 = 0,005 Р1. (13.7)
При расчете добавочных потерь для неноминального режима следует пользоваться выражением
Р′доб = Рдоб β2 (13-8)
где β = I1/ I1ном —коэффициент нагрузки.
Сумма всех потерь АД
Сумма всех потерь АД (Вт)
∑P = Рэм + Рэ1 + Рэ2 + Рмех + Рдоб.
(13.9)
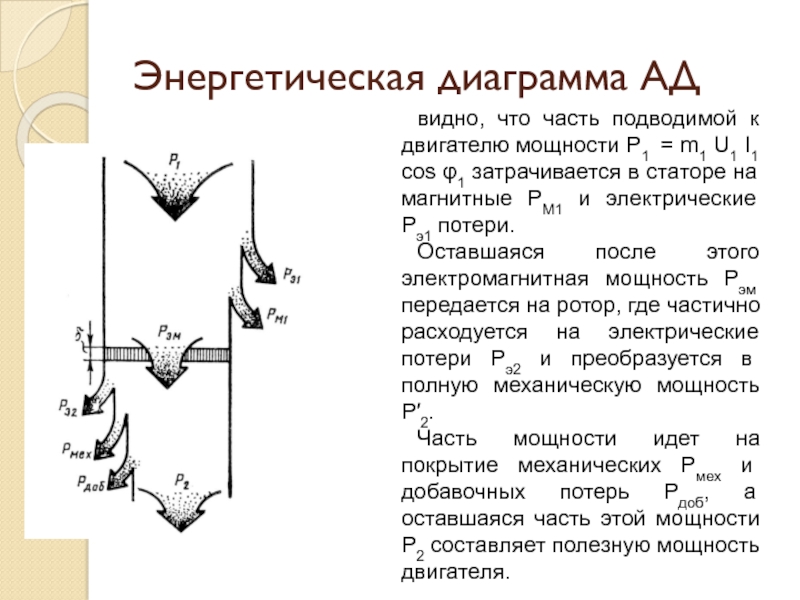
Энергетическая диаграмма АД
видно, что часть подводимой к двигателю мощности Р1 = m1 U1 I1 cos φ1 затрачивается в статоре на магнитные РМ1 и электрические Рэ1 потери.
Оставшаяся после этого электромагнитная мощность Рэм передается на ротор, где частично расходуется на электрические потери Рэ2 и преобразуется в полную механическую мощность Р′2.
Часть мощности идет на покрытие механических Рмех и добавочных потерь Рдоб, а оставшаяся часть этой мощности Р2 составляет полезную мощность двигателя.
РЭ1 и РЭ2 (электрические потери в обмотках ) — переменные потери, так как их величина зависит от нагрузки двигателя, т. е. от значений токов в обмотках статора и ротора [см. (13.2) и (13.3)].
Рдо6 — переменные потери (13.8).
Рм и Рмех — практически не зависят от нагрузки (исключение составляют двигатели, у которых с изменением нагрузки в широком диапазоне меняется частота вращения).
η = Р2/ Р1 =1 -∑ P
КПД АД с изменениями нагрузки также меняет свою величину:
в режиме х.х. КПД η = 0,
а затем с ростом нагрузки он увеличивается, достигая максимума при нагрузке
ηмах = (0,7 ÷ 0,8)Рном.
При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке (P2 > Рном) он резко убывает, что объясняется интенсивным ростом переменных потерь (Рэ1 + Рэ2 + Рдоб), величина которых пропорциональна квадрату тока статора, и уменьшением коэффициента мощности.
Статические характеристики асинхронного двигателя. Понятие критического скольжения, момента, мощности. «Опрокидывание» асинхронного двигателя.
Асинхронные машины относятся к классу электромеханических преобразователей, т.е. преобразователей электрической энергии в механическую или механической в электрическую. В первом случае они называются двигателями, а во втором — генераторами. Все электрические машины обладают свойством обратимости и могут осуществлять преобразование энергии в обоих направлениях, поэтому при изучении процессов в машинах пользуются понятиями двигательного и генераторного режимов. Однако при разработке и изготовлении машины оптимизируются для условий работы в одном из режимов и используются в соответствии с назначением. Асинхронные машины не являются исключением из этого правила, но асинхронные генераторы значительно уступают синхронным по многим параметрам и редко используются на практике, в то время как асинхронные двигатели являются самыми распространёнными электромеханическими преобразователями. Суммарная мощность асинхронных двигателей составляет более 90% общей мощности всех существующих двигателей, поэтому в данном курсе мы ограничимся рассмотрением только этого типа машин.
Асинхронные двигатели относятся к бесколлекторным машинам переменного тока или машинам с вращающимся магнитным полем. Название асинхронные (несинхронные) объясняется тем, что в статическом режиме работы скорость вращения ротора (вращающейся части) двигателя отличается от скорости вращения магнитного поля, т.е. ротор и поле вращаются несинхронно.
Причиной широкого распространения асинхронных двигателей является их предельная простота, надёжность и экономичность. Конструкция асинхронных двигателей не претерпела существенных изменений с 1889 года, когда эти двигатели были изобретены М.О. Доливо-Добровольским. Можно сказать, что асинхронные двигатели совместно с синхронными генераторами и трёхфазными линиями передачи и распределения электрической энергии образуют систему передачи механической энергии на расстояние.
В последнее время в связи с появлением полупроводниковых преобразователей частоты для питания асинхронных двигателей область их применения существенно расширилась. Они стали широко применяться в высокоточных приборных приводах там, где ранее использовались в основном двигатели постоянного тока.
При анализе процессов в асинхронном двигателе и в справочных данных используют понятие скольжения  как разности между скоростями вращения магнитного поля (
как разности между скоростями вращения магнитного поля (  ) и ротора (
) и ротора (  ), отнесённой к скорости вращения поля. При известной частоте сети и числе пар полюсов по скольжению можно определить скорость вращения. Например, скорость вращения двигателя с двумя парами полюсов при питании от промышленной сети (n = 60*50/2 = 1500 об/мин) и скольжении 0,05 составляет 1425 об/мин. Скольжение при неподвижном роторе (n = 0) равно единице, а при синхронном вращении (n =n1) — нулю. Скорость или частота вращения магнитного поля называется также синхронной скоростью (частотой), т.к. ротор при этой скорости вращается синхронно с полем. Синхронный режим работы асинхронного двигателя называется идеальным холостым ходом. Он возможен только в том случае, если ротор приводится во вращение другим двигателем или механизмом, присоединённым к валу.
), отнесённой к скорости вращения поля. При известной частоте сети и числе пар полюсов по скольжению можно определить скорость вращения. Например, скорость вращения двигателя с двумя парами полюсов при питании от промышленной сети (n = 60*50/2 = 1500 об/мин) и скольжении 0,05 составляет 1425 об/мин. Скольжение при неподвижном роторе (n = 0) равно единице, а при синхронном вращении (n =n1) — нулю. Скорость или частота вращения магнитного поля называется также синхронной скоростью (частотой), т.к. ротор при этой скорости вращается синхронно с полем. Синхронный режим работы асинхронного двигателя называется идеальным холостым ходом. Он возможен только в том случае, если ротор приводится во вращение другим двигателем или механизмом, присоединённым к валу.
Вращающий электромагнитный момент двигателя в соответствии с законом электромагнитных сил
 где См — конструктивная постоянная; j2s- фазовый сдвиг между током и магнитным потоком. Отношение максимального момента Мmax к номинальному Мн определяет перегрузочную способность двигателя и составляет 2,0-2,2 (дается в каталожных данных). Максимальный момент соответствует критическому скольжению sк, определяемому активными и индуктивными сопротивлениями двигателя, и пропорционален активному сопротивлению цепи ротора.
где См — конструктивная постоянная; j2s- фазовый сдвиг между током и магнитным потоком. Отношение максимального момента Мmax к номинальному Мн определяет перегрузочную способность двигателя и составляет 2,0-2,2 (дается в каталожных данных). Максимальный момент соответствует критическому скольжению sк, определяемому активными и индуктивными сопротивлениями двигателя, и пропорционален активному сопротивлению цепи ротора.
 Потери в асинхронном двигателе
Потери в асинхронном двигателе
Потери делятся на потери в статоре и в роторе. Потери в статоре состоят из электрических потерь в обмотке Рэ1 и потерь в стали Рст, а потери в роторе — из электрических Рэ2 и механических Рмех плюс добавочные потери на трение и вентиляцию Рдоб.
где К = 2,9-3,6 определяется диаметром статора D1.
Потери в стали в рабочем режиме во много раз меньше электрических потерь в роторе и ими обычно пренебрегают.
КПД асинхронного двигателя составляет от 0,75 до 0,95.
Рабочий момент двигателя пропорционален квадрату напряжения, что необходимо учитывать при включении двигателя в протяженных распределительных сетях. Номинальному моменту соответствует номинальное скольжение, а пусковому — sп.
 Зависимость момента двигателя от скольжения М=f(s) приведена на рисунке. На участке от 0 до Мmax двигатель работает в устойчивом режиме, а участок от Skназывается режимом опрокидывания двигателя, при котором двигатель в результате перегрузки останавливается и не может вернуться в рабочий режим без очередного запуска. Пусковые свойства двигателя определяются соотношением пускового момента Мп и номинального. В соответствии с каталожными данными оно составляет 1,6-1,7. При пуске асинхронного двигателя cosj очень мал и пусковой ток в обмотке статора может возрастать в 5-7 раз по сравнению с номинальным. Ограничение его осуществляется изменением частоты питающего напряжения для двигателя с короткозамкнутым ротором и увеличением активного сопротивления в цепи ротора для двигателя с фазовым ротором. Для механизмов, имеющих тяжелые условия пуска, где желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: с большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения.
Зависимость момента двигателя от скольжения М=f(s) приведена на рисунке. На участке от 0 до Мmax двигатель работает в устойчивом режиме, а участок от Skназывается режимом опрокидывания двигателя, при котором двигатель в результате перегрузки останавливается и не может вернуться в рабочий режим без очередного запуска. Пусковые свойства двигателя определяются соотношением пускового момента Мп и номинального. В соответствии с каталожными данными оно составляет 1,6-1,7. При пуске асинхронного двигателя cosj очень мал и пусковой ток в обмотке статора может возрастать в 5-7 раз по сравнению с номинальным. Ограничение его осуществляется изменением частоты питающего напряжения для двигателя с короткозамкнутым ротором и увеличением активного сопротивления в цепи ротора для двигателя с фазовым ротором. Для механизмов, имеющих тяжелые условия пуска, где желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: с большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения.
Потери энергии и КПД асинхронных двигателей
В электрических двигателях имеются потери энергии трех видов: потери в обмотках, потери в стали и механические потери. Кроме того, имеются незначительные добавочные потери.
Потери энергии в асинхронном двигателе рассмотрим при помощи его энергетической диаграммы (рис. 1). На диаграмме Р1 — мощность, подводимая к статору двигателя из сети. Основная часть Рэм этой мощности, за вычетом потерь в статоре, передается электромагнитным путем на ротор через зазор. Рэм называется электромагнитной мощностью.

Рис. 1. Энергетическая диаграмма двигателя
Потери мощности в статоре складываются из потерь мощности в его обмотке Pоб1 = m1 х r1 х I12 и потерь в стали Pс1. Мощность Pс1 является потерями на вихревые токи и на перемагничивание сердечника статора.
Потери в стали имеются и в сердечнике ротора асинхронного двигателя, но они невелики и могут не приниматься во внимание. Это объясняется тем, что скорость вращения магнитного потока относительно статора n0 во много раз больше скорости вращения магнитного потока относительно ротора n0 — n, если скорость вращения ротора асинхронного двигателя n соответствует устойчивой части естественной механической характеристики.
Механическая мощность асинхронного двигателя Рмх, развиваемая на валу ротора, меньше электромагнитной мощности Рэм на значение мощности Pоб2 потерь в обмотке ротора:
Мощность на валу двигателя:
где pмх — мощность механических потерь, равная сумме потерь на трение в подшипниках, на трение вращающихся частей о воздух (вентиляционные потери) и на трение щеток о кольца (для двигателей с фазным ротором).
Электромагнитная и механическая мощности равны:
Рэм = ω0M, Рмх = ωM,
где ω0 и ω — синхронная скорость и скорость вращения ротора двигателя; М — момент, развиваемый двигателем, т. е. момент, с которым вращающееся магнитное поле действует на ротор.
Из этих выражений следует, что мощность потерь в обмотке ротора:
или Pоб2 = s х Pэм
В случаях, когда известно активное сопротивление г2 фазы обмотки ротора, потери в этой обмотке могут быть найдены также из выражения Pоб2 = m2х r2х I22.
В асинхронных электродвигателях имеются также добавочные потери, обусловленные зубчатостью ротора и статора, вихревыми токами в различных конструктивных узлах двигателя и другими причинами. При полной нагрузке двигателя потери Pд принимаются равными 0,5% его номинальной мощности.
Коэффициент полезного действия (КПД) асинхронного двигателя:
η = P2 / P1 = (P1 — (Pоб — Pс — Pмх — Pд)) / P1,
где Роб =Pоб1 + Роб2 — суммарная мощность потерь в обмотках статора и ротора асинхронного двигателя.
Поскольку общие потери зависят от нагрузки, то и КПД асинхронного двигателя является функцией нагрузки.
На рис. 2, а дана кривая η = f(Р/Рном), где Р/Рном — относительная мощность.

Рис. 2. Рабочие характеристики асинхронного двигателя
Асинхронный электродвигатель конструируется так, чтобы максимум ее коэффициента полезного действия ηmax имел место при нагрузке, несколько меньшей номинальной. КПД двигателя достаточно высок и в широком диапазоне нагрузок (рис. 2, а). Для большинства современных асинхронных двигателей КПД имеет значение 80 — 90%, а для мощных двигателей 90-96%.