Что называется коэффициентом мощности асинхронного двигателя
Рабочие характеристики асинхронного двигателя
§ 94. РАБОЧИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ
Рабочие характеристики асинхронного двигателя представляют собой зависимости скольжения S, числа оборотов ротора n2, развиваемого момента М, потребляемого тока I1, расходуемой мощности Р1, коэффициента мощности соs j и к. п. д. η от полезной мощности Р2 на валу машины. Эти характеристики (рис. 115) снимаются три естественных условиях работы двигателя, т. е. двигатель нерегулируемый, частота f1 и напряжение U1 сети остаются постоянными, а изменяется только нагрузка на валу двигателя.

При увеличении нагрузки на валу двигателя скольжение возрастет, причем при больших нагрузках скольжение увеличивается несколько быстрее, чем при малых.
При холостом ходе двигателя п2=n1 или S=0.
При номинальной нагрузке скольжение обычно составляет S = 3-5%.
Скорость вращения ротора

Так как при увеличении нагрузки на валу двигателя скольжение возрастает, то число оборотов будет уменьшаться. Однако изменение скорости вращения при увеличении нагрузки от 0 до номинальной очень незначительно и не превышает 5%. Поэтому скоростная характеристика асинхронного двигателя является жесткой — она имеет очень малый наклон к горизонтальной оси.
Вращающий момент, развиваемый двигателем М, уравновешен тормозным моментом на валу М2 и моментом, идущим на преодоление механических потерь М, т. е.

где Р2 — полезная мощность двигателя,
W2 — угловая скорость ротора.
При холостом ходе двигателя вращающий момент равен М; с увеличением нагрузки на валу этот момент также увеличивается, причем за счет некоторого уменьшения скорости ротора увеличение вращающего момента происходит быстрее, чем увеличение полезной мощности на валу.
Сила тока I1 потребляемого двигателем из сети, неравномерно изменяется с увеличением нагрузки на валу двигателя. При холостом ходе соs j мал и ток имеет большую реактивную составляющую и очень малую активную составляющую. При малых нагрузках на валу двигателя активная составляющая тока статора меньше реактивной составляющей, а потому изменение нагрузки, т. е. изменение активной составляющей тока, вызывает незначительное изменение силы тока I1 (определяющейся в основном реактивной составляющей). При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает значительное изменение силы тока I1..
Потребляемая двигателем мощность Р1 при графическом изображении имеет вид почти прямой линии, незначительно отклоняющейся вверх при больших нагрузках, что объясняется увеличением потерь в обмотках статора и ротора с увеличением нагрузки.
Изменение коэффициента мощности при изменении нагрузки на валу двигателя происходит следующим образом. При холостом ходе соsj мал (порядка 0,2), так как активная составляющая тока статора, обусловленная потерями мощности в машине, мала по сравнению с реактивной составляющей этого тока, создающей магнитный поток. При увеличении нагрузки на валу соsj возрастает (достигая наибольшего значения 0,8—0,9) в результате увеличения активной составляющей тока статора. При очень больших нагрузках происходит некоторое уменьшение соsj, так как вследствие значительного увеличения скольжения и частоты тока в роторе возрастает реактивное сопротивление обмотки ротора.
Кривая к. п. д. т) имеет такой же вид, как в любой машине или трансформаторе. При холостом ходе к. п. д. равен нулю. С увеличением нагрузки на валу двигателя к. п. д. резко увеличивается, а затем уменьшается. Наибольшего значения к. п. д. достигает при такой нагрузке, когда потери мощности в стали и механические потери, не зависящие от нагрузки, равны потерям мощности в обмотках статора и ротора, зависящим от нагрузки.
Учебные материалы
Асинхронные машины обладают свойством обратимости. Однако асинхронные генераторы практически не применяются, так как характеристики хуже, чем у синхронных генераторов.
Широкое применение имеют трехфазные асинхронные двигатели.
Асинхронный двигатель
Асинхронный двигатель состоит из неподвижного статора и вращающегося ротора, разделенных между собой воздушным зазором.
Статор состоит из цилиндрического литого корпуса, сердечника и трехфазной обмотки.
Сердечник собирается из тонких листов электротехнической стали, изолированных друг от друга и запрессовывается в корпусе статора. На внутренней поверхности сердечника вырублены пазы, в которые укладывается трехфазная обмотка статора.
Обмотка подключена к трехфазной сети и представляет собой систему проводников, сдвинутых относительно друг друга в пространстве вдоль окружности статора на 120 о . Обмотки статора могут соединяться звездой или треугольником.
Схема соединения обмоток статора зависит от расчетного напряжения двигателей и номинального напряжения двигателей и номинального напряжения сети.
Ротор состоит из стального вала, на который напрессован сердечник, выполненный из отдельных листов электротехнической стали с пазами.
Обмотка ротора бывает двух типов – короткозамкнутая и фазная. Наибольшее распространение имеют двигатели с короткозамкнутым ротором (ротор с беличьей клеткой).
Токопроводящая часть такого ротора состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов (см. рисунок). Обычно «беличья клетка» формируется путем заливки пазов ротора расплавленным алюминием.
Фазный ротор имеет три обмотки, соединенные в звезду. Выводы обмоток присоединены к кольцам, закрепленным на валу и изолированным друг от друга и от вала (см. рис.19)
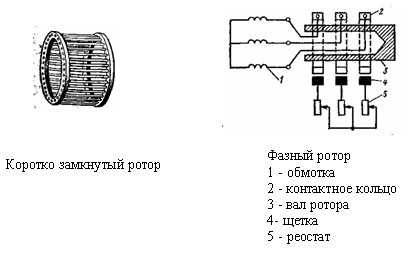
Рис. 19
Для осуществления электрического контакта с обмоткой вращающегося фазного ротора на каждое контактное кольцо накладывают подпружиненные щетки, расположенные в щеткодержателях.
Асинхронные двигатели с фазным ротором имеют более сложную конструкцию и менее надежны, но они обладают лучшими регулировочными и пусковыми свойствами.
Регулирование частоты вращения асинхронных двигателей
Из выражения, по которому можно рассчитать частоту вращения ротора
следует, что n2 можно регулировать изменением какой либо из трех величин: скольжения (S), частоты тока в обмотке статора или числа пар полюсов (р) в обмотке статора.
Коэффициент мощности асинхронных двигателей
Кроме активной мощности Р1 двигатель потребляет реактивную мощность Q1, в основном необходимую для образования вращающегося магнитного поля. Коэффициент мощности определяется по формуле:
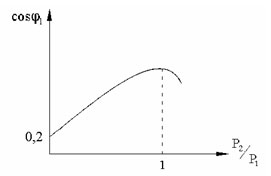
Рис.21. Зависимость коэффициента мощности от загрузки двигателя
При холостом ходе cos φ1 имеет малое значение (не превышает 0,2), так как активная мощность расходуется только на относительно небольшие потери в статоре и небольшие механические потери, а реактивная мощность имеет практически постоянное значение.
Уважаемые студенты!
Специалисты нашего сайта готовы оказать помощь в учёбе по разным предметам:
✔ Решение задач
✔ Выполнение учебных работ
✔ Помощь на экзаменах
мтомд.инфо
Рабочие характеристики асинхронного двигателя
| Раздел: | Электротехника |
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД асинхронного двигателя η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Расчет рабочих характеристик асинхронного двигателя
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 — s).
Скольжение s = Pэ2/Pэм, то есть скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n2 ≈ n1.
По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0,01 — 0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2′ угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2′ возрастают электрические потери в роторе.
Рабочие характеристики асинхронного двигателя

Зависимость М2 = f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ω2 = 60 P2/(2πn2) = 9,55Р2/n2, где Р2 — полезная мощность, Вт; ω2 = 2πf2/60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2 = const, то график М2 = f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 = f (P2) имеет криволинейный вид.
Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода. Объясняется это тем, что ток холостого хода электродвигателя I при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ), лишь немногим меньше 90°.
Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80 — 0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cos φ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе.
В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ1, целесообразно подводимое к двигателю напряжение U1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя.
Расчет параметров частотного преобразователя для асинхронных двигателей
-
1 commentПринцип работы 12 сентября, 2019

Зачастую приходится понижать скорость вращения двигателя, выполняющего определенные задачи в механизме. Уменьшение числа оборотов элеткродвигателя можно добиться с помощью самодельных приборов, управляющих схем стандартного изготовления.
Электродвигатели переменного тока часто используются в деятельности человека, на металлообрабатывающих станках, транспорта, крановых механизмов и другого оборудования. Двигатели превращают энергию переменного тока питания во вращение вала и агрегатов. Используются в основном асинхронные двигатели переменного тока.
Ротор, а также и статор двигателя состоят из катушек провода, уложенного в сердечник, изготовленный из специальной стали. Классификация электродвигателей следует от способа закладки обмотки.
Обмотка из латунных и медных стержней вставляется в сердечник, по краям устанавливаются кольца. Такая катушка провода называется короткозамкнутым (КР) ротором. Электродвигатели небольшой мощности имеют стержни, а также диски, которые были отлиты вместе. Для электродвигателей с мощным моментом детали отливаются отдельно, затем свариваются. Обмотка статора может быть подключена двумя методами: треугольником, звездой.

Фазный ротор состоит из 3-фазной роторной обмотки, подключенной контактными кольцами и щетками к питанию. Обмотка соединена «звездой».

Расчет количества оборотов асинхронного двигателя
Распространенным двигателем на станках и подъемных устройствах является двигатель с короткозамкнутым ротором, поэтому пример для расчета следует брать для него. Сетевое напряжение поступает на статорную обмотку. Обмотки смещены друг от друга на 120 градусов. Возникшее поле электромагнитной индукции возбуждает электрический ток в обмотке. Ротор начинает работать под действием ЭМС.
Основной характеристикой работы двигателя является число оборотов в минуту. Рассчитываем это значение:
n = 60 f / p, обор / мин;
где f – частота сети, герц, р – количество полюсов статора (в парах).
На корпусе электродвигателя имеется табличка с техническими данными. Если ее нет, то можно самому рассчитать число оборотов вала оборудования по другим имеющимся данным. Расчет производится тремя способами.
- Расчет числа катушек, которое сравнивается с нормами для разного напряжения, следует по таблице:

- Расчет скорости работы по шагу диаметра обмотки по формуле:
2 p = Z1 / y, где 2р – количество полюсов, Z1 – число пазов в статоре, у – шаг обмотки.
Выбираем из таблицы подходящие обороты двигателя:

- Высчитываем количество полюсов по параметрам сердечника по формуле:
2p = 0,35 Z1 b / h или 2 p = 0,5 Di / h,
где 2р – количество полюсов, Z1 – число пазов, b – размер зуба, см, h – высота спинки, см, Di – диаметр по зубцам, см.
По результатам расчета и индукции следует число витков обмотки, сравнивается со значениями мотора по паспорту.
Как изменить скорость работы двигателя?
Изменять скорость вращающего момента механизма оборудования можно различными способами, например, механическими редукторами с переключением передач, муфтами и другими устройствами. Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
- Коррекция магнитного поля путем воздействия на частоту тока, уменьшение или увеличение числа пар полюсов, коррекция напряжения. Направление характерно моторам с короткозамкнутым (КР) ротором.
- Скольжение корректируется напряжением питания, добавлением еще одного резистора в цепь схемы ротора, установкой двойного питания, использованием каскада вентилей. Такое направление используется для роторов с фазами.
Регулировка частоты и напряжения с помощью частотного преобразователя, путем создания дополнительной катушки с переключением полюсов пар, являются самыми востребованными способами.
Распространенные схемы регуляторов
Существует множество частотных преобразователей для асинхронных двигателей, а также различных регуляторов для них. Самостоятельно возможно изготовить прибор для регулировки частоты, применяя транзисторы или тиристоры. Прибор работает как в быту, так и для станочного оборудования, крановых механизмов, различных регулируемых приводов агрегатов.
Мощный регулятор частоты и напряжения показан на схеме. Прибор плавно изменяет параметры привода, экономит энергию, снижает расходы на обслуживание.
Для применения этой схемы в быту, она сложная. Если использовать симистор рабочим элементом, то схема упрощается, и выглядит иначе.

Регулировка будет происходить работой потенциометра, определяюцим фазу импульса входа, и открывающего симистор.

Эффект эксплуатации станков, обрабатывающих металл, подъемных устройств также следует из вращения двигателя, как и сами его эксплуатационные параметры. В продаже имеется множество приборов для регулировки частоты, однако можно вполне собрать такой прибор собственными силами.
Как выбрать частотный преобразователь?
Если проанализировать цены и функции преобразователей частоты, то можно понять, что по цене определяется количество встроенных функции частотного преобразователя. Дорогие модели обладают большой функциональностью. Но для выбора прибора лучше руководствоваться требуемыми условиями применения.
- Частотники бывают с двумя видами управления: скалярное, векторное. При скалярном управлении прибор действует при определенных значениях выходной разности потенциалов и частотой, работают в примитивных домашних приборах, например, вентиляторах. При векторном управлении сила тока устанавливается достаточно точно.
- При выборе прибора параметры мощности играют определяющую роль. Величина мощности расширяет сферу использования, упрощает обслуживание.
- При выборе устройства учитывается интервал рабочего напряжения сети, что снижает опасность выхода его из строя из-за резких перепадов разности потенциалов. При чрезмерном повышении напряжения конденсаторы сети могут взорваться.
- Частота – немаловажный фактор. Его величина определяется требованиями производства. Наименьшее значение говорит о возможности использования скорости в оптимальном режиме работы. Для получения большего интервала частоты применяют частотники с векторным управлением. В реальности часто используются инверторы с интервалом частот от 10 до 10 Гц.
- Частотный преобразователь, имеющий много разных выходов и входов удобен в пользовании, но стоимость его выше, настройка сложнее. Разъемы частотников бывают трех типов: аналоговые, дискретные, цифровые. Связь обратного вида вводных команд производится через аналоговые разъемы. Цифровые клеммы производят ввод сигналов от датчиков цифрового типа.
- Выбирая модель частотного преобразователя, нужно дать оценку управляющей шине. Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.
- Частотники, выдерживающие большие перегрузки (на 15% выше мощности мотора), при выборе имеют предпочтения. Чтобы не ошибиться при покупке преобразователя частоты, ознакомьтесь с инструкцией. В ней имеются главные параметры эксплуатации оборудования. Если нужен прибор для максимальных нагрузок, то необходимо выбирать частотник, сохраняющий ток на пике работы выше, чем на 10% от номинала.
Как подключить частотный преобразователь
Если кабель для подключения на 220 В с 1-й фазой, применяется схема «треугольника». Нельзя подключать частотник, если выходной ток выше 50% от номинального значения.
Если кабель питания на три фазы 380 В, то делается схема «звезды». Чтобы проще было подключать питание, предусмотрены контакты и клеммы с буквенными обозначениями.
- Контакты R, S, T предназначены для подключения сети питания по фазам.
- Клеммы U , V , W служат соединением электродвигателя. Для реверса достаточно изменить подключение двух проводов между собой.
В приборе должна быть колодка с клеммой подключения к земле. Подробней, как подключить, здесь.
Как обслуживать частотные преобразователи?
Для долгосрочной эксплуатации инвертора требуется контроль за его состоянием и выполнение предписаний по обслуживанию:
- Очищать от пыли внутренние элементы. Можно использовать компрессор для удаления пыли сжатым воздухом. Пылесос для этих целей не подходит.
- Периодически контролировать состояние узлов, производить замену. Срок службы электролитических конденсаторов составляет пять лет, предохранительных вставок – десять лет. Охлаждающие вентиляторы работают до замены 3 года. Шлейфы проводов используются шесть лет.
- Контроль напряжения шины постоянного тока и температура механизмов является необходимым мероприятием. При повышенной температуре термопроводящая паста засыхает и выводит из строя конденсаторы. Каждые 3 года на силовые клеммы наносят слой токопроводящей пасты.
- Условия и режим работы необходимо соблюдать в строгом соответствии. Температура окружающей среды не должна превышать 40 градусов. Пыль и влажность отрицательно влияют на состояние рабочих элементов прибора.
Окупаемость преобразователя частоты
Электроэнергия постоянно дорожает, руководители организаций вынуждены экономить разными путями. В условиях промышленного производства большая часть энергии расходуется механизмами, имеющими электродвигатели.
Изготовители устройств для электротехнических машин и агрегатов предлагают специальные устройства и приборы для управления электромоторами. Такие устройства экономят энергию электрического тока. Они называются инверторами или частотными преобразователями.
Финансовые затраты на покупку частотника не всегда оправдывают экономию средств, так как стоимость их сопоставима со стоимостью сэкономленной энергии. Не всегда привод механизма можно быстро оснастить инвертором. Какие сложности при этом возникают? Разберем способы запуска асинхронных двигателей для пониманию достоинств инверторов.
Методы запуска двигателей
Можно определить 4 метода пуска двигателей.
- Прямое включение, для моторов до 10 кВт. Способ неэффективен для ускорения, увеличения момента, перегрузок. Токи выше номинала в 7 раз.
- Включение с возможностью выбора схем «треугольника» и «звезды».
- Интегрирование устройства плавного пуска.
- Применение инвертора. Способ особенно эффективен для защиты мотора, ускорения, момента, экономии энергии.
Экономическое обоснование эффекта от инвертора
Время окупаемости инвертора рассчитывается отношением затрат на покупку к экономии энергии. Экономия обычно равна от 20 до 40% от номинальной мощности мотора.
Затраты снижают факторы, повышающие производительность частотных преобразователей:
- Уменьшение затрат на обслуживание.
- Повышение ресурса двигателя.

где Э – экономия денег в рублях;
Рпч – мощность инвертора;
Ч – часов эксплуатации в день;
К – коэффициент ожидаемого процента экономии;
Т – тариф энергии в рублях.
Время окупаемости равно отношению затрат на покупку инвертора к экономии денег. Расчеты показывают, что период окупаемости получается от 3 месяцев до 3 лет. Это зависит от мощности мотора.