Чем регулировать скорость асинхронного двигателя
Частотный регулятор скорости для асинхронного двигателя
Регулировка скорости изменением величины напряжения снижает момент и также увеличивает потери мощности. Регулировка частоты вращения путем изменения числа полюсов осуществляется ступенчато, кроме того, этот способ пригоден только для специальных многоскоростных двигателей с несколькими обмотками неподвижной части.
Асинхронный двигатель – самый распространенный электропривод технологического оборудования. Главная особенность таких электрических машин – постоянная скорость вращения вала. Ее регулировку осуществляют:
- Механическим способом. Для этого вал подключают к редукторам, муфтам и другим устройствам.
- Путем изменения числа пар полюсов, величины или частоты питающего напряжения обмоток статора.
Механическое регулирование усложняет кинематическую схему электропривода, ведет к потерям мощности и нерациональному расходу электроэнергии.
Наиболее перспективный метод регулирования уголовной скорости ротора – преобразование частоты питающего напряжения. Этот способ обеспечивает сохранение механических характеристик во всем диапазоне и обладает рядом других преимуществ.
Устройство и принцип работы частотного регулятора
Принцип частотного регулирования основан на зависимости угловой скорости вращения ротора от частоты напряжения на обмотках статора. С появлением IGBT-транзисторов и GTO-тиристоров наибольшее распространение получила схема преобразования частоты на базе широтно-импульсного модулятора.
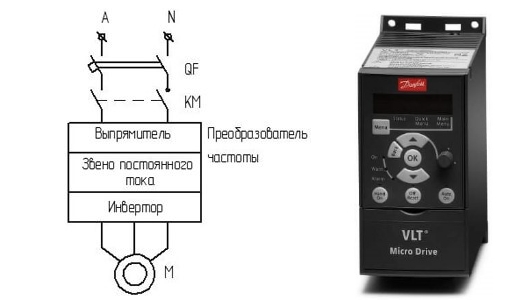
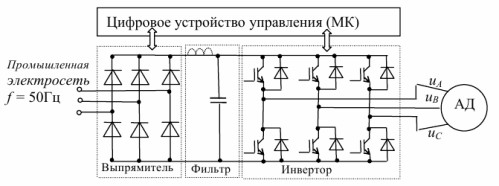
Такие преобразователи частоты состоят:
- Из силового выпрямителя с С или LC фильтром для сглаживания пульсаций.
- Из инвертора на IGBT-транзисторах для преобразования постоянного напряжения в переменное, заданной частоты и амплитуды.
- Из блока управления для генерации отпирающих силовые транзисторы импульсов.
Переменное напряжение выпрямляется и преобразуется в постоянное, затем снова инвертируется в переменное. Частота на силовом выходе ПЧ определяется длительностью отпирающих силовые транзисторы импульсов, поступающих со схемы управления.
Такой способ регулирования позволяет изменять частоту и амплитуду напряжения в силовой цепи электродвигателя, а значит управлять скоростью вращения ротора и моментом на валу электрической машины.
Структура частотного регулятора
Большинство частотных преобразователей для электродвигателей до 690 В выполнены по схеме двухуровневых инверторов напряжения. Они позволяют моделировать напряжение питания необходимой формы, амплитуды частоты. Такие устройства состоят из неуправляемого выпрямителя, 2-х транзисторных ключей на каждую фазу и конденсатора. Выходное напряжение содержит высшие гармоники, которые сглаживаются индуктивной нагрузкой. Специальные фильтры применяют относительно редко.
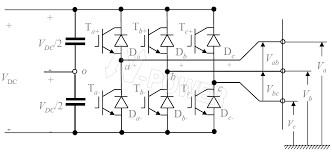
К недостаткам такой схемы является ограничение величины выходного напряжения, которое определяется максимальным напряжением полупроводниковых устройств.
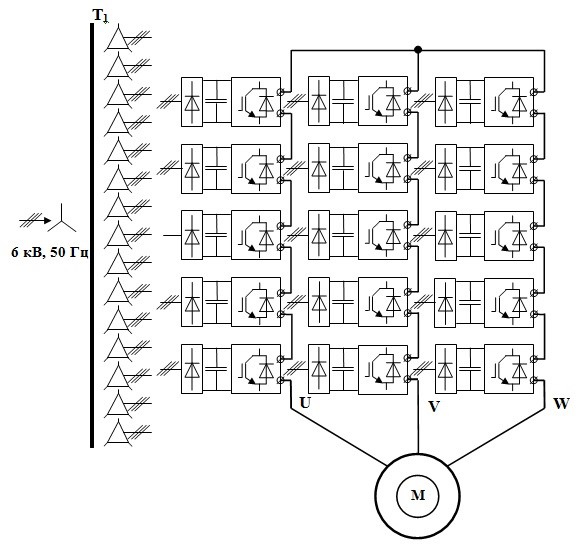
Для высоковольтных приводов используются многоуровневые схемы регулирования. Они состоят из нескольких однофазных инверторов, соединенных последовательно. Такая схема позволяет избежать резонансов, обеспечивает высокое быстродействие, снижает скорость нарастания напряжения. Такие ПЧ имеют модульную конструкцию. При выходе из строя одной из ячеек, ее легко заменить. К недостаткам этой схемы относятся необходимость отдельного источника питания для каждого модуля, функции которого выполняет трансформатор специального назначения.
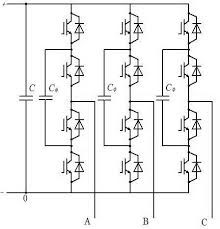
Преобразователи частоты с плавающими конденсаторами позволяют обойтись без входного трансформатора и увеличивать число ячеек в зависимости от требуемой мощности. Такое решение обеспечивает снижение высших гармоник, уменьшает скорость нарастания напряжения.
Для регулировки скорости электродвигателей с повторно-кратковременным режимом работы частыми реверсами применяют инверторы тока. Эти устройства представляют собой управляемый выпрямитель и инвертор на тиристорах. Для уменьшения помех в цепи нагрузки в схему включается расщепленный индуктивный фильтр. Выходное напряжение таких устройств имеет форму аппроксимированной синусоиды. Для сглаживания его формы обязательно включение перед электродвигателем конденсаторов. Главное достоинство таких ПЧ – возможность рекуперации электроэнергии обратно в электросеть.
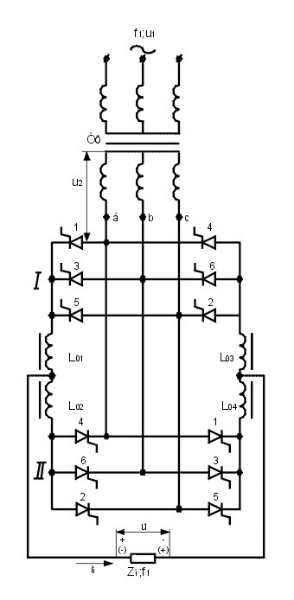
Прямые преобразователи частоты не содержат конденсаторов. Главное их преимущество – небольшие габариты и значительная мощность нагрузки. Такие устройства используются в составе мощных электроприводов работающих на низких скоростях. ПЧ этого типа выполнены на базе тиристорных преобразователей. На входе прямых ПЧ установлен фазосдвигающий трансформатор, устраняющий низшие гармоники и выполняющий функцию источника питания для каждого преобразователя. Прямые ПЧ требуют сложной схемы управления.
Состав частотных преобразователей
Кроме выпрямителя, ШИМ-модулятора и инвертора, в состав частотного преобразователя входят:
Устройство для ввода данных и обмена информаций с ПК, другими частотными преобразователями.
- Встроенная энергонезависимая память. В этом устройстве фиксируются аварийные отключения, изменения настроек, а также другие данные.
- Управляющий контроллер, обеспечивающий реализацию алгоритмов управления, обработку данных с датчиков, защитное отключение при ненормальных режимах работы.
- ЭМ-фильтр. Это устройство обеспечивает снижение реактивной высокочастотной составляющей, снижающей качество электроэнергии и отрицательно влияющей на работу электродвигателя.
- Вентилятор и радиатор для принудительного охлаждения и отвода тепла силовых транзисторов.
- Тормозной прерыватель и другие элементы.
Кроме аппаратной части, преобразователи частоты содержат программное обеспечение. Контроллеры с открытой логикой позволяют вносить изменения в стандартное ПО, поставляемое производителем, и самостоятельно программировать ПЧ.
Однофазные преобразователи частоты
Однофазные асинхронные электродвигатели широко применяются в качестве приводов насосных агрегатов, вентиляторов, маломощных станков. Для регулирования частоты вращения этих электрических машин применяются 2 основных способа:
- Изменение величины напряжения питания.
- Изменение частоты питающего напряжения.
Для регулирования питающего напряжения применяются трансформаторные, автотрансформаторные, тиристорные, симисторные и транзисторные преобразователи. Изменение частоты вращения путем регулирования напряжения имеет ряд серьезных недостатков:
- Увеличение скольжения и сильный нагрев обмоток статора.
- Узкий диапазон регулирования.
Кроме того, постоянная составляющая питающего напряжения на выходе тиристорных и симисторных устройств вызовает увеличение шума при работе, рывки и другие нежелательные явления.
Частотное регулирование лишено этих недостатков. Однофазные ПЧ применяются в холодильном оборудовании, системах вентиляции, бытовых насосах.
Такие электроприводы обеспечивают:
- Стабильную работу однофазного двигателя при любой частоте вращения.
- Снижение потребления электроэнергии.
- Возможность автоматической регулировки частоты вращения с обратной связью по изменению одного или нескольких технологических параметров.
- Удаленное управление и контроль характеристик.
- Защиту от ненормальных режимов работы и коротких замыканий.
- Интеллектуальное управление электродвигателем в соответствии с заданным алгоритмом.
- Возможность пуска без фазосдвигающего элемента.
- Поддержание необходимого момента на валу во всем диапазоне изменения скорости.
Кроме базовых составляющих, в состав однофазного преобразователя частоты входят ПИД-регулятор, ПЛК-контроллер, устройство для обмена данными с удаленным оборудованием, пульт дистанционного управления. При введении дополнительных настроек допустимо применение трехфазного ПЧ для однофазных двигателей переменного тока.

Таким образом, управление однофазными и трехфазными асинхронными электродвигателями путем изменения частоты значительно превосходит метод регулирования величины напряжения, механические способы.
Чем регулировать скорость асинхронного двигателя
Добавлено (26.08.2013, 13:34)
———————————————
а знаешь что будет если частота питающей сети отличается от номинала?
Насколько я знаю, для регулировки оборотов асинхронного двигателя нужно менять частоту тока. Вот скопировал с одного сайта  . Сам я это устройство не повторял.
. Сам я это устройство не повторял.

Как известно можно изменять (регулировать) скорость вращения асинхронного безколлекторного электродвигателя изменяя частоту питающего двигатель переменного напряжения. На этом принципе был разработан, приведенный здесь, электронный регулятор скорости вращения. Регулятор позволяет изменять скорость вращения в довольно широких пределах — от 1000 до 4000 об/мин.
Регулятор состоит из задающего генератора с регулируемой частотой от 50 до 200 Гц, в который входят мультивибратор на микросхеме К561ЛА7 , счетчик К561ИЕ8 формирующий сигналы управления с фиксированным «мертвым временем» для управления силовыми полевиками полумоста регулятора.
Выходной трансформатор Т1 обеспечивает развязку верхнего и нижнего транзисторов полумоста. Выпрямитель, удвоитель напряжения питающей сети состоит из диодного моста VD9, включенного по нестандартной схеме и конденсаторов фильтра на которых и удваивается напряжение питания полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4.
Для трансформатора управления ключами, использовался каркас трансформатора от БП телевизора KORFUNG Ч/Б. Можно применить любой другой с аналогичным сечением железа — тип магнитопровода не имеет значения. Первичная обмотка содержит 120 витков провода диаметром 0,7мм, с отводом от середины, вторичная — две отдельные обмотки по 60 витков тем же проводом. Данные по вольтажу обмоток: первичка 2х12 вольт, вторички 12 вольт каждая, если сечение железа отличается от заданного, расчитать можно по формулам для трансформаторов на 50Гц. Марка провода роли не играет (медный).
Обе вторичные обмотки нужно хорошо изолировать друг от друга, так как потенциал между ними достигает 640 вольт. Подключать выходные обмотки к затворам ключей необходимо в противофазе.
Регулятор может работать с двигателями мощностью до 500Вт. Для применения регулятора с более мощными двигателями необходимо применить в схеме большее число силовых ключей в параллельном включении и увеличить емкость конденсаторов фильтра питания С3 и С4.
Конструктивно регулятор выполнен на печатной плате размрами 110 х 80мм, трансформатор управления ключами ставится отдельно.
Добавлено (26.08.2013, 19:50)
———————————————
Он там регулирует от 50гц до 200гц. Но думаю, если изменить емкость С1 можно добиться частоты пониже. Тем самым и уменьшить обороты.
Регулятор оборотов электродвигателя без потери мощности
Назначение
Технически регулятор оборотов электродвигателя предназначен для изменения количества вращения вала за единицу времени. На этапе разгона корректировка частоты обеспечивает более плавную процедуру, меньшие токи и т.д. В некоторых технологических процессах необходимо регулятор оборотов снижает скорость движения оборудования, изменение подачи или нагнетания сырья и т.д.
Однако на практике данная опция может преследовать и другие цели:
- Экономия затрат электроэнергии – позволяет снизить потери в моменты пуска и остановки вращений мотора, переключения скоростей или регулировки тяговых характеристик. Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы.
- Контроль температурного режима, величины давления без установки обратной связи с рабочим элементом или с таковой в асинхронных электродвигателях.
- Плавный пуск – предотвращает бросок тока в момент включения, особенно актуально для асинхронных моторов с большой нагрузкой на валу. Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры.
- Поддержание оборотов трехфазных электродвигателей на требуемой отметке. Актуально для точных технологических операций, где из-за колебаний питающего напряжения может нарушиться качество производства или на валу возникает разное усилие.
- Регулировка скорости оборотов электродвигателя от 0 до максимума или от другой базовой скорости.
- Обеспечения достаточного момента на низких частотах вращения электрической машины.
Возможность реализации тех или иных функций у регуляторов оборотов определяет как принцип их действия, так и схематическое исполнение.
Виды двигателей
Регулятор оборотов с поддержанием мощности — изобретение, которое вдохнет новую жизнь в электроприбор, и он будет работать как только что приобретенный товар. Но стоит помнить о том, что двигатели бывают разных форматов и у каждого своя предельная работа.
Двигатели разные по характеристикам. Это значит то, что та или иная техника работает на разных частотах оборота вала, запускающего механизм. Мотор может быть:
В основном трехфазные электромоторы встречаются на заводах или крупных фабриках. В домашних условиях используются однофазные и двухфазные. Данного электричества хватает на работу бытовой техники.




Принцип работы
Для регулировки оборотов может использоваться способ понижения или повышения напряжения, изменение силы тока и частоты, подаваемых в обмотки асинхронных и коллекторных электродвигателей. Поэтому далее рассмотрим варианты частотных преобразователей и регуляторов напряжения.
Среди используемых в промышленной и бытовой сфере следует выделить:
- Введение рабочего сопротивления – реализуется при помощи переменных резисторов, делителей и прочих преобразователей. Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения.
- Автотрансформаторный – выполняется путем перемещения подвижного контакта по обмотке, что снижает или увеличивает скорость вращения электродвигателя. Преимущество такого принципа заключается в четкой синусоиде переменного тока и большой перегрузочной способности.
- Тиристорный или симисторный – изменяет величину питающего напряжения посредством пары встречно включенных тиристоров или совместного включения с симистором. Этот способ применим не только в асинхронных двигателях, но и других бытовых приборах – диммерах, переключателях и т.д.

Рис. 1. Схема тиристорного регулятора
Как видите на схеме, подаваемое на тот же асинхронный однофазный электродвигатель напряжение, проходит через переменный резистор R1 на тиристор D1 и на управляющий электрод симистора T1. Перемещая ручку тиристорного регулятора R1 изменяем и скорость вращения однофазного электродвигателя.
- Транзисторный – позволяет изменять форму подаваемого напряжения за счет преобразования числа импульсов и временной паузы между подаваемым напряжением. Благодаря чему получил название широтно-импульсной модуляции, пример такого регулятора приведена на схеме ниже.

Регулировка оборотов на транзисторах
Здесь питание однофазного асинхронного двигателя производится от линии 220В через выпрямительный блок VD1-4, далее напряжение поступает на эмиттер и коллектор транзисторов VT1 и VT2. Подавая управляющий сигнал на базы этих транзисторов, и регулируют обороты мотора.
- Частотный – преобразует частоту подаваемого напряжения на обмотки однофазного или трехфазного асинхронного электродвигателя. Это наиболее современный способ, ранее он относился к дорогостоящим, но с появлением дешевых высоковольтных полупроводников и микроконтроллеров перешел в разряд наиболее эффективных. Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ.

Пример частотного регулирования
- Полюсный – позволяет регулировать частоту вращения электродвигателя при переключении количества катушек в фазных обмотках, в результате чего изменяется направление и величина тока, протекающего в каждой из них. Реализуется как за счет намотки нескольких катушек для каждой из фаз, так и одновременным последовательным или параллельным соединением катушек, такой принцип приведен на рисунке ниже.

Регулировка оборотов переключением пар полюсов







Из чего состоит конструкция?
Устройство электродвигателя переменного тока включает помимо ротора и статора:
- тахогенератор;
- щеточно-коллекторный механизм.
Ток якоря взаимодействует с магнитным потоком обмотки возбуждения, вызывая в коллекторном механизме вращение ротора. Ток подается через щетки на коллектор, являющийся узлом ротора и соединенным с обмоткой статора последовательно. Он собран из пластин, имеющих в сечении форму трапеции.
Продемонстрировать принцип работы такого двигателя можно с помощью хорошо известного со школьной программы опыта с вращающейся рамкой, которую поместили между разноименными полюсами магнитного поля. Она вращается под воздействием динамических сил, когда по ней протекает ток. При изменении направления тока, рамка не меняет направления вращения.
Примести к выходу из строя механизма могут высокие обороты холостого хода, вызванные максимальным моментом при последовательном подсоединении обмоток возбуждения.
Как выбрать?
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
- Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов.
- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
Достоинства и недостатки
Как водится, начнём с перечисления плюсов. Достоинства коллекторных электромоторов такие:
- Простое устройство.
- Высокая скорость до 10 000 об/мин.
- Хороший крутящий момент даже на малых оборотах.
- Невысокая стоимость.
- Возможность регулировать скорость в широких пределах.
- Невысокие пусковые токи и нагрузки.

Схема коллекторного двигателя
Неплохие качества, но есть и недостатки, причём они не менее серьёзные. Минусы коллекторных электродвигателей такие:
- Высокий уровень шумов при работе. Особенно на высоких скоростях. Щетки трутся о коллектор, дополнительно создавая шумы.
- Искрение щёток, их износ.
- Необходимость частого обслуживания коллекторного узла.
- Нестабильность показателей при изменении нагрузки.
- Высокая частота отказов из-за наличия коллектора и щёток, малый срок службы этого узла.
В целом, коллекторный двигатель неплохой выбор, иначе его не ставили бы на бытовой технике. Справедливости ради стоит сказать, что при нормальном качестве исполнения, работают такие двигатели годами. Могут и 10-15 лет проработать без проблем.
Подключение
Способ подключения регулятора оборотов электродвигателя будет отличаться в зависимости от его типа и принципа действия. Поэтому в качестве примера мы разберем один из наиболее распространенных частотных регуляторов, которые используются в самых различных сферах.
Перед подключением обязательно ознакомьтесь с заводской схемой. Как правило, вы можете увидеть ее на самом регуляторе оборотов, либо в паспорте устройства:

Схема подключения регулятора
Далее, пользуясь распиновкой, можно определить количество выводов, которые будут использоваться для подключения регулятора электродвигателя к сети. В нашем примере, рассмотрим случай, когда применяется трехпроводная система, значит, понадобится фаза, ноль и земля. На задней панели регулятора это два вывода AC и FG:

Распиновка регулятора
Затем необходимо проверить цветовую маркировку разъема с приведенной схемой и сопоставить ее со всеми элементами электродвигателя, которые будут подключаться в вашем случае. Если какие-то выводы окажутся лишними, их можно закоротить, как показано на рисунке выше.

Проверьте цветовую маркировку
Если все выводы регулятора соответствуют клеммам электродвигателя, можете подсоединять их друг к другу и к сети.
Регулирование угловой скорости асинхронных двигателей

Глава двадцать шестая
РЕГУЛИРОВАНИЕ УГЛОВОЙ СКОРОСТИ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
26.1. Возможные способы регулирования угловой скорости
Возможные способы регулирования угловой скорости в асинхронных двигателях вытекают из формулы

Согласно (26.1) скорость ротора двигателя можно регулировать изменением угловой скорости магнитного поля он или скольжения s . Скорость магнитного поля  зависит от частоты питающего напряжения Д и числа пар полюсов р. Изменение скольжения может быть получено за счет изменения электрических потерь в цепи ротора (регулированием подводимого напряжения или включением в цепь ротора добавочного резистора) или введения добавочной ЭДС в эту цепь.
зависит от частоты питающего напряжения Д и числа пар полюсов р. Изменение скольжения может быть получено за счет изменения электрических потерь в цепи ротора (регулированием подводимого напряжения или включением в цепь ротора добавочного резистора) или введения добавочной ЭДС в эту цепь.
Все указанные способы регулирования скорости находят практическое применение. Рассмотрим их подробнее. Оценку каждого из способов будем производить по следующим показателям: 1) возможному диапазону регулирования; 2) плавности регулирования; 3) изменению КПД привода при регулировании.
26.2. Регулирование угловой скорости изменением частоты f 1
Из всех возможных способов регулирования этот способ позволяет плавно изменять угловую скорость в наиболее широком диапазоне (до 10:1, а иногда и более). Для его осуществления требуется, чтобы двигатель (или группа двигателей) получал питание от отдельного источника (рис. 26.1). В качестве такого источника могут быть использованы электромеханические или статические преобразователи частоты. В связи с развитием полупроводниковой техники в настоящее время наиболее предпочтительными являются полупроводниковые статические преобразователи.
В зависимости от требований к механическим характеристикам асинхронного двигателя при частотном регулировании одновременно с изменением частоты f 1 приходится по определенному закону изменять и подводимое к обмотке статора напряжение U 1.
Максимальный момент двигателя приближенно (пренебрегая сопротивлением r 1) определяется по формуле

Учитывая, что и  , получаем
, получаем

где k 1 — постоянный коэффициент.
Отношение моментов М MAX при двух значениях частоты f 1 будет равно:

где индексы (1) и (2) относятся к различным угловым скоростям.

|
Рис. 26.1. Схема регулирования угловой скорости изменением частоты f 1 (ПЧ — преобразователь частоты)
Исходя из (26.2), можно получить в общем виде закон изменения U 1 при регулировании частоты f 1:

Если при регулировании частоты вращения требуется, чтобы М MAX на механических характеристиках при любой частоте f 1 оставался неизменным (регулирование с постоянным моментом), то из (26.3) получим

Откуда следует, что для осуществления регулирования с постоянным моментом необходимо подводимое к обмотке статора напряжение изменять пропорционально его частоте. Отметим, что при осуществлении закона регулирования (26.4) основной магнитный поток машины при различных значениях частоты f 1 практически остается неизменным, т. е.

Механические характеристики двигателя при регулировании с М MAX = const даны на рис. 26.2, а.
Если регулирование происходит с постоянной механической мощностью Р2, то момент М MAX должен изменяться обратно пропорционально частоте вращения, а следовательно, и f 1:

Подставляя (26.5) в (26.3), получаем закон изменения напряжения при регулировании с постоянной мощностью

Механические характеристики для этого случая показаны на рис. 26.2, б.
Соотношения (26.4) и (26.6) являются приближенными, так как не учитывают влияния сопротивления r 1 на MMAX , что наиболее сильно проявляется при малых частотах f 1. Поэтому при U 1/ f 1= const максимальный момент М MAX в зоне малых частот будет уменьшаться (рис. 26.2, а).

|
Рис. 26.2. Механические характеристики асинхронного двигателя при различных значениях f 1 и M = const ( a ), P 2= const (б)
При частотном регулировании асинхронных двигателей их энергетические характеристики остаются практически неизменными. Поэтому этот способ регулирования является экономичным. Недостатками частотного регулирования являются громоздкость и высокая стоимость источника питания.
26.3. Регулирование угловой скорости изменением числа пар полюсов
Угловая скорость магнитного поля в асинхронном двигателе, а следовательно, и угловая скорость ротора обратно пропорциональна числу пар полюсов. Изменяя число пар полюсов, можно регулировать скорость. Число пар полюсов зависит от шага и схемы соединения обмотки статора.
Для регулирования угловой скорости на статоре в общих пазах можно разместить не одну, а две обмотки, имеющие различные шаги, а следовательно, и различное число пар полюсов. В зависимости от необходимой скорости в сеть подключается та или иная обмотка. Этот способ применяется сравнительно редко, так как он имеет существенный недостаток — плохое использование обмоточного провода (всегда работает только одна из обмоток).
Более часто изменение числа пар полюсов достигается изменением (переключением) схемы соединения уложенной на статоре обмотки. Принцип такого переключения поясняется на рис. 26.3. При переходе с последовательного соединения двух катушек (рис. 26.3, а) на параллельное соединение (рис. 26.3,6) число пар полюсов изменяется с 2 на 1. При наличии фазной обмотки на роторе ее также следует переключать одновременно с обмоткой статора. Поэтому обмотку ротора у таких двигателей выполняют короткозамкнутой. Асинхронные двигатели с переключением числа пар полюсов называют многоскоростными. Они выпускаются на две, три и четыре угловые скорости. Известно большое число схем, позволяющих осуществлять переключение числа пар полюсов. Эти схемы разделяются на схемы регулирования с постоянным моментом и схемы регулирования с постоянной мощностью.

Рис. 26.3. Схемы включения обмотки статора на различное число полюсов
Для примера на рис. 26.4 и 26.5 представлены наиболее часто применяемые схемы соединения обмоток с переключением числа пар полюсов в отношении 2: 1. Обмотки каждой фазы состоят из двух одинаковых частей. При анализе этих схем примем, что при f 1Л= const номинальный ток в каждой части фазы I 1Ф, КПД и cosφ 1 двигателя при обеих частотах вращения будут одинаковыми.

|
Рис. 26.4. Принципиальная схема соединений обмотки статора с переключением числа полюсов в отношении 2:1 при М= const
Рис. 26.5. Принципиальная схема соединений обмотки статора с переключением числа полюсов в отношении 2:1 при Р2= const
На рис. 26.4, а обе части фазы соединены последовательно, а фазы между собой — в звезду. На рис. 26.4, б половины каждой фазы соединены параллельно, образуя двойную звезду (УУ). С учетом принятых допущений мощности на валу соответственно будут равны:


Мощность P 2(б) соответствует меньшему числу пар полюсов и большей в 2 раза угловой скорости. Мощность P 2(а) соответствует большему числу пар полюсов и меньшей угловой скорости.
Как следует из (26.7), при переходе от меньшей скорости (рис. 26.4, а) к большей (26.4, б) допустимая мощность на валу увеличивается в 2 раза. Вращающий момент в том и другом случае сохраняется неизменным (М(а)=М(б)). Поэтому рассматриваемая схема переключения У/УУ (рис. 26.4) носит название схемы переключения с постоянным моментом.
На рис. 26.5 показана принципиальная схема пересоединения обмотки статора для изменения числа полюсов при постоянной мощности. На рис. 26.5, а две половины каждой фазы соединяют последовательно, а фазы между собой — . в треугольник. На рис.. 26.5, б половины фаз соединяются параллельно, образуя двойную звезду. Соединение по рис. 26.5, а соответствует большему числу пар полюсов и меньшей угловой скорости, а соединение по рис. 26.5, б — меньшему числу пар полюсов и большей угловой скорости.
Соответственно мощности на валу для этих схем


Многоскоростные двигатели применяются для привода станков, вентиляторов, насосов и пр.
26.4. Регулирование угловой скорости изменением подводимого напряжения
Для регулирования угловой скорости асинхронного двигателя подводимое напряжение к обмотке статора по сравнению с номинальным уменьшается. Так как момент пропорционален  , то механические характеристики при меньшем напряжении пойдут ниже естественной. Если момент нагрузки Мс остается постоянным, то, как это следует из рис. 26.6, при снижении напряжения скольжение будет увеличиваться. Скорость при этом уменьшается. Регулирование скольжения в этом случае возможно в пределах 0 s sKP . Ограничением для увеличения скольжения более sKP является то, что при дальнейшем снижении напряжения на новой механической характеристике М MAX будет меньше М C и двигатель остановится. Для расширения диапазона регулирования следует увеличить sKP за счет повышения активного сопротивления цепи ротора.
, то механические характеристики при меньшем напряжении пойдут ниже естественной. Если момент нагрузки Мс остается постоянным, то, как это следует из рис. 26.6, при снижении напряжения скольжение будет увеличиваться. Скорость при этом уменьшается. Регулирование скольжения в этом случае возможно в пределах 0 s sKP . Ограничением для увеличения скольжения более sKP является то, что при дальнейшем снижении напряжения на новой механической характеристике М MAX будет меньше М C и двигатель остановится. Для расширения диапазона регулирования следует увеличить sKP за счет повышения активного сопротивления цепи ротора.
Изменение подводимого напряжения чаще всего осуществляется с помощью последовательно включенных с двигателем реакторов, подмагничиваемых постоянным током, или за счет импульсной подачи напряжения на обмотки статора. При подмагничивании меняется индуктивное сопротивление реактора, что приводит к изменению падения напряжения в нем, а следовательно, и напряжения, подводимого к двигателю. Применив схему автоматического регулирования тока подмагничивания, можно расширить зону регулирования в область S > SKP и получить при этом жесткие механические характеристики.

|
Рис. 26.6. Характеристики M = f ( s ) при различных значениях U 1
При импульсной подаче напряжения за счет изменения продолжительности импульса можно менять среднее напряжение на двигателе. Здесь также можно применить схемы автоматического регулирования.
Способ регулирования угловой скорости изменением подводимого напряжения имеет существенный недостаток, состоящий в том, что в этом случае увеличиваются потери и снижается КПД двигателя. При снижении напряжения пропорционально U 1 уменьшается основной магнитный поток машины, вследствие чего при M = MC = const возрастают ток, а следовательно, и электрические потери в роторе. Магнитные потери в стали статора уменьшаются. В зависимости от значения М C при снижении U 1 ток в статоре и электрические потери в его обмотке могут уменьшаться или увеличиваться. Обычно при нагрузках, близких к номинальной, со снижением U 1 полные потери возрастают, что повышает нагрев двигателя. Поэтому рассматриваемый способ регулирования угловой скорости находит применение главным образом для машин небольшой мощности.
26.5. Регулирование угловой скорости включением в цепь ротора добавочного резистора
 Этот способ регулирования применяется в двигателях с фазным ротором. На рис. 26.7 показаны механические характеристики двигателя с различными значениями добавочного активного сопротивления
Этот способ регулирования применяется в двигателях с фазным ротором. На рис. 26.7 показаны механические характеристики двигателя с различными значениями добавочного активного сопротивления  в цепи ротора.
в цепи ротора.
Рис. 26.7. Характеристики М= f(s) при различных значениях
При М C = const в зависимости от значения двигатель будет работать со скольжениями s1-s3 , чему соответствуют угловые скорости ω( 1 ) — ω( 3 ) . Этот способ позволяет плавно, в широких пределах (до s=l ), регулировать угловую скорость. Однако практически он применяется для регулирования скорости в сравнительно узких пределах, так как при увеличении возрастают электрические потери в цепи ротора, при этом происходит также снижение КПД.
В этом случае, как и в предыдущем, электрические потери в цепи ротора увеличиваются пропорционально скольжению  . Однако в отличие от предыдущего способа здесь токи ротора и статора в процессе регулирования при MC=const практически остаются неизменными, и возрастание потерь происходит не в самом роторе, а в регулировочном реостате. С точки зрения нагрева двигателя этот способ регулирования является более благоприятным.
. Однако в отличие от предыдущего способа здесь токи ротора и статора в процессе регулирования при MC=const практически остаются неизменными, и возрастание потерь происходит не в самом роторе, а в регулировочном реостате. С точки зрения нагрева двигателя этот способ регулирования является более благоприятным.