

Асинхронный двигатель с электромагнитным тормозом схема
Устройство управления однофазным асинхронным двигателем
 Предлагаемое устройство может быть использовано для управления однофазными асинхронными двигателями, в частности, для пуска и торможения асинхронного двигателя (АД) с короткозамкнутым ротором малой мощности, имеющего пусковую обмотку или пусковой конденсатор, отключаемые до окончании пуска. Возможно использование устройства для пуска более мощных асинхронных двигателей, а также для пуска трехфазных двигателей, работающие в однофазном режиме.
Предлагаемое устройство может быть использовано для управления однофазными асинхронными двигателями, в частности, для пуска и торможения асинхронного двигателя (АД) с короткозамкнутым ротором малой мощности, имеющего пусковую обмотку или пусковой конденсатор, отключаемые до окончании пуска. Возможно использование устройства для пуска более мощных асинхронных двигателей, а также для пуска трехфазных двигателей, работающие в однофазном режиме.
В известном устройстве [1] повторный нормальный пуск возможен лишь после остывания термистора и не обеспечивается тормозной режим роботы. Предлагаемое устройство имеет более широкие функциональные возможности.
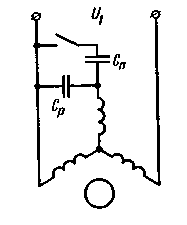
Устройство (рис.1) содержит двухполюсный переключатель SA1 на два положения, с помощью которого к зажимам питающей сети подключается рабочая обмотка Р асинхронного двигателя и обмотка электромагнитного реле К1 через выпрямительный диод VD1, времязадающую RC-цепочку, состоящую из параллельно соединенных резистора R1 и электролитического конденсатора С1. Замыкающий контакт К1.1 реле К1 служит для подключения пусковой обмотки II АД к питающей сети через фазосдвигающий элемент С2 и переключатель SA1.
В исходном предпусковом положении обмотка электромагнитного реле К1 и выпрямительный диод VD1 шунтированы контактами переключателя SA1. Времязадающая RC-цепочка через эти же контакты переключателя присоединена к зажимам рабочей обмотки Р.
Устройство работает следующим образом.
При включении АД с помощью двухполюсного переключателя SA1 обтекается током рабочая обмотка Р и срабатывает реле К1 по цепи: диод VD1, времязадающая RC-цепочка, обмотка реле К1, переключатель SA1. Реле К1 контактом К1.1 подключает к сети пусковую обмотку П с фазосдвигающим элементом С2. По истечении промежутка времени, определяемого времязадающей RC-цепочкой, диод VD1 запирается этой цепочкой и реле размыкает свой контакт К1.1 в цепи пусковой обмотки П, отключат ее от сети. Пуск АД закончен. Конденсатор С1 в течение всего времени работы АД находится в заряженном состоянии, практически до амплитудного значения напряжения сети. Напряжение на нем можно несколько снизить уменьшением величины резистора R1. При отключении АД от сети диод VD1 и рабочая обмотка Р двигателя шунтируются переключателем SA1, а времязадающая RC-цепочка через переключатель подключается к зажимам рабочей обмотки. Конденсатор времяэадающей RC-цепочки разряжается на рабочую обмотку Р, создавая тормозной момент на валу АД. Повторный пуск возможен сразу после остановки АД, т.к. конденсатор RC-цепочки разряжен. Время торможения АД до 1 с при свободном выбеге ротора АД.
Упрощенный вариант устройства приведен на рис.2. Этот вариант использовался автором в течение нескольких лет для АД холодильного агрегата холодильника, у которого была «подпалена» пусковая обмотка из-за большого превышения напряжения в сети в результате чего, пусковое реле холодильника не отключало пусковую обмотку АД и она перегревалась. При этом цепь торможения (контакты 2-3 переключателя SA1) из-за ненадобности не использовалась, а контакты 1-2 заменялись контактами термореле холодильника.
Детали. В качестве переключателя SA1 используется любой подходящий по току и напряжению тумблер. Диод VD1 типа Д226Б может быть заменен на Д237Б, Д237В или на КД105 с любым буквенным индексом. Резистор R1 типа МЛТ-2 50. 100 кОм. Конденсатор С1 — электролитический типа КЭ-2 на 30 мкФ и 450 В может быть заменен на КЭ-1 или ЭМ. Последний — малогабаритный. Электромагнитное реле К1 промежуточное реле переменного тока на 220 В типа РП-21, РП-25 или МКУ-48. Конденсатор С2 подбирается из расчета 7 мкФ на 100 Вт мощности АД типа МБГО-2 на напряжение не ниже 400 В или типа МБГЧ, что предпочтительней.
Устройство не потребляет электроэнергии при работе асинхронного электродвигателя, не требует наладки и начинает работать сразу же при исправных элементах и правильном монтаже.
Литература 1. Патент Японии №14058, кл.55А342,1969.
2 Авт. свид. СССР № 629616, кл.Н02Р1/42
Автор: Коломойцев К. В. «ЭЛЕКТРИК» (Радиоаматор-Электрик)
Любите умные гаджеты и DIY? Станьте специалистом в сфере Internet of Things и создайте сеть умных гаджетов!
Записывайтесь в онлайн-университет от GeekBrains:

Изучить C, механизмы отладки и программирования микроконтроллеров;
Получить опыт работы с реальными проектами, в команде и самостоятельно;
Получить удостоверение и сертификат, подтверждающие полученные знания.
Starter box для первых экспериментов в подарок!
После прохождения курса в вашем портфолио будет: метостанция с функцией часов и встроенной игрой, распределенная сеть устройств, устройства регулирования температуры (ПИД-регулятор), устройство контроля влажности воздуха, система умного полива растений, устройство контроля протечки воды.
Вы получите диплом о профессиональной переподготовке и электронный сертификат, которые можно добавить в портфолио и показать работодателю.
Электродвигатели с электромагнитным тормозом. Какие могут быть проблемы в работе и как их устранить?

- 29 марта 2018 22:34:00
- Отзывов:
- Просмотров: 2359
-


Двигатели с электромагнитным тормозом (тормозные двигатели) — что это такое и зачем они нужны читайте далее.
Электродвигатель с электромагнитным тормозом – это привычный всем электрический двигатель с установленным на нем дополнительным механизмом, способным моментально замедлить вращение двигателя. Применяются тормозные двигатели в конвейерном оборудовании, станках и устройствах, которым необходимо мгновенно остановится.
Остановка двигателя происходит за счет электромагнитного тормоза, который находится между подшипниковым щитом и вентилятором. Основными составными компонентами электромагнитного тормоза являются вал тормоза, тормозной диск и механизм тормоза.

Рис. 1. Основные элементы тормозного двигателя
КАК ВЫБРАТЬ ТОРМОЗНЫЕ ДВИГАТЕЛИ ДЛЯ УСТРОЙСТВ С МГНОВЕННОЙ ОСТАНОВКОЙ
К покупке электродвигателя с электромагнитным тормозом стоит подойти подготовленным. Основными критериями, которые нужно знать при выборе тормозных двигателей является мощность двигателя (от этого зависит скорость работы Вашего оборудования), частота вращения вала, монтажное исполнение (место расположения электродвигателя) и климатический условия в которых будет использоваться электродвигатель.
Основываясь на приведенных выше параметрах Вы с легкостью сможете подобрать себе тормозной электродвигатель с высокой производительностью и длительным сроком службы.
Узнать электродвигатель с электромагнитным тормозом можно будет по его маркировке. Если Вы видите в конце типоразмера букву Е (например, АИР250М4Е, АИР80B2E), то можете быть уверенны — это электродвигатель с электромагнитным тормозом.
А чтобы срок службы двигателя был как можно дольше обращайте внимание на то как он работает, а также на какие-либо внешние проявления и признаки неисправности двигателя. Ниже представлен рисунок с возможными причинами неисправности электродвигателя и способами их устранения.

Рис. 2. Неисправности электродвигателя и способы их устранения
Если Вы не можете устранить неполадки с электродвигателем самостоятельно, то в таком случае лучше обратитесь к производителю Вашего двигателя с магнитным тормозом или переходите по ссылке чтобы наши специалисты помогли в решении возникшей проблемы и помогли ответить на вопрос — когда заменить тормозные двигатели, без нанесения ущерба Вашему производству.
Лекция 22. Способы торможения асинхронных двигателей
Асинхронная машина, подключенная к трехфазной сети, может работать в режимах двигателя (0 1, квадрант IV).
В режиме электромагнитного тормоза направления вращения полей статора и ротора противоположны и режим называют торможением противовключением. Такое торможение достигается изменением направления вращения поля статора. При этом характеристика Е1 заменяется обращенной характеристикой Е2. Для уменьшения токов АД одновременно уменьшают напряжение статора (характеристика И2). Рабочая точка из а1 по горизонтали скачком переходит в а2 и затем по характеристике И2 движется вниз. При достижении точки а3 (n = 0) АД нужно отключить от сети, иначе начнется реверс. При активном моменте МС (груз в подъемнике) возможен второй способ торможения противовключением: в цепь ротора вводится большое сопротивление (характеристика И1) и АД включается на подъем. Под действием преобладающего момента МС > Мп из точки а4 начнется спуск груза с подтормаживанием. В точке а5 пересечения характеристик И1 и МС установится частота спуска –n2 (тормозной спуск).

Характеристики торможения противо- включением
Рекуперативное торможение возникает, если двигатель переходит в
генераторный режим (s n1).
Этот вид торможения наблюдается в частотно-управляемых двигателях при понижении частоты f1, а также в многоскоростных двигателях при переходе на низкую скорость.
Например, при увеличении числа пар полюсов характеристика Е1 заменяется на Е2, при этом рабочая точка а1 по горизонтали скачком переходит в точке а2 и далее по характеристике Е2 плавно в точке а3, а4. Участок а2а3 является генераторным. Ему соответствует торможение (М n1, т. е. переходит в генераторный режим, при этом кинетическая энергия груза преобразуется в электрическую энергию и отдается в сеть.
Динамическое торможение осуществляют отключением обмоток статора от трехфазной сети и подключением к источнику постоянного напряжения U (рисунок а). Постоянный ток I обмоток статора создает неподвижное магнитное поле, под действием которого в обмотке вращающегося по инерции ротора индуцируются токи, создающие тормозной момент. Искусственные механические характеристики в режиме динамического торможения (рисунок б) можно регулировать изменением сопротивлений R или Rд в цепи ротора (кривая 1). Кривая 2 соответствует двигателю с короткозамкнутым ротором.

Динамическое торможение: а – схема; б – характеристики
Рабочими характеристиками АД называют зависимости частоты вращения n, момента на валу М, тока статора I1, КПД η и cosφ1 от полезной мощности Р2 при U1ном, f1ном .
 Рабочие характеристики асинхронного двигателя
Рабочие характеристики асинхронного двигателя
Характеристика n(Р2) по форме близка к механической характеристике n(М) и является жесткой. Характеристика М(Р2) близка к линейной, поскольку n и Ω изменяются мало. Зависимость I1(Р2) начинается с точки I холостого хода, который для АД составляет (0,25¸0,35)I1ном. Мощность всех потерь в АД складывается из мощности постоянных потерь (механические и потери из-за вихревых токов и гистерезиса) и мощности переменных потерь (нагрев обмоток статора и ротора). КПД η достигает максимума при равенстве постоянных и переменных потерь. У АД это условие выполняется при наиболее вероятной нагрузке, т. е. при Р2 = (0,6¸0,7)Р2ном. КПД микромашин составляет 0,4¸0,6, машин малой и средней мощности – 0,7¸0,9, мощных машин – 0,9¸0,95. Коэффициент мощности cosφ1 на холостом ходе низок (не более 0,2). С ростом нагрузки он растет и достигает максимума при Р2 » Р2ном. Для двигателей малой и средней мощности при полной загрузке cosφ1 = 0,7¸0,9, при Р2 > 100 кВт cosφ1 = 0,9¸0,95. Значениям cosφ1 = 0,7¸0,9 соответствуют значения sinφ1 = 0,7¸0,3, т. е. даже при полной загрузке доля реактивного тока статора составляет 70–30%. При неполной загрузке АД cosφ1 существенно снижается, а в режимах, близких к холостому ходу, АД загружает сеть в основном реактивным током. Поэтому полная загруженность АД – необходимая мера по повышению cosφ промышленных предприятий.
ОДНОФАЗНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ
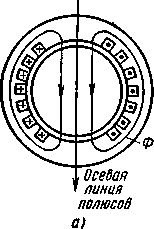
На статоре однофазного АД располагается одна обмотка. Ротор имеет короткозамкнутую обмотку. Протекающий по обмотке статора переменный ток создает пульсирующий магнитный поток, изменяющий свое направление с частотой напряжения сети. Этот поток все время направлен по осевой линии полюсов, и его значение во времени изменяется по синусоидальному закону.
Принцип действия. Пульсирующий магнитный поток можно представить как результат сложения двух вращающихся с одинаковой частотой в противоположном направлении потоков, значения которых равны.

Если пульсирующий поток изменяется по закону Ф = Фмахcosωt, то при t =0 поток Ф = Фмах. Вращающиеся потоки Ф1 и Ф11 равны 0,5 Фмах и при t =0 совпадают по направлению. Сумма вращающихся потоков равна пульсирующему потоку при t =0.
Через некоторое время при t = Т/8 пульсирующий поток Ф = Фмахcos(π/4) = 0,707 Фмах. За это время поток Ф1,вращающийся по часовой стрелке с частотой n1 повернется на угол π/4. на такой же угол, но в противоположном направлении, повернется вращающийся поток Ф11, частота вращения которого n11. Частоты вращения равны между собой: n1 = n11 = 60f/p. При t = Т/8 имеем Ф1 + Ф11 = Ф.
Из рисунка следует, что для каждого момента времени векторная сумма вращающихся потоков равна пульсирующему магнитному потоку. Это позволяет рассматривать однофазный АД при условии существования двух вращающихся магнитных потоков Ф1 и Ф11.
При неподвижном роторе эти потоки создают вращающиеся моменты, направления которых совпадают с направлением вращения магнитных потоков, а значения .пропорциональны их значениям. Следовательно, потоки Ф1 и Ф11 создают равные, но противоположные по направлению вращающие моменты, в результате чего ротор не может тронуться с места. Пусковой момент двигателя равен нулю.
Если ротор вращать в направлении вращения потока Ф1, то поток Ф1 будет прямым, а поток Ф11— обратным. При этом скольжение ротора по отношению к потокам Ф1 и Ф11.становиться различным.

Скольжение по отношению к прямому потоку s1 = (n1 – n2)/n1, а скольжение по отношению к обратному потоку, определяемое также как в режиме электромагнитного тормоза, s11 = (n11 + n2)/n11 = (n1 – n2)/n1 = [n1 + n1(1 — s1)] = 2 — s1.
При пуске двигателя s1 = 1 и s11 = 1. Если s1 = 0, то и s11 = 2, а если
s1 = 2, то и s11 = 0.
Каждый из вращающихся потоков создает вращающий момент зависимости от скольжения которых имеет такой же вид, как для трехфазных асинхронных двигателей.
С учетом связи между s1 и s11 и того, что моменты М1 и М11противоположны по направлению строят зависимость М1 (s1), М11 (s11 ), и суммарного момента М (s).

Проанализируем зависимость М (s). При s1 = s11 = 1 вращающий момент М = Мп = 0. При уменьшении скольжения s1 двигатель развивает вращающий момент, направленный в сторону вращения потока Ф1; при уменьшении скольжения s11 (s11 0, направленный в сторону вращения ротора. Вращающий момент имеет максимальное значение Ммах, которое меньше максимального значения М1.
Однофазный асинхронный двигатель с пусковой обмоткой. Для пуска вход однофазного АД применяют специальную пусковую обмотку (ПО), располагаемую на статоре под углом 90° к рабочей (РО).

Последовательно с пусковой обмоткой включают конденсатор С, благодаря которому ток Iп в этой обмотке опережает по фазе напряжение сети U1 на некоторый угол. Применение пусковой обмотки обеспечивает выполнение двух необходимых условий получения вращающегося магнитного потока ( сдвиг обмоток статора в пространстве и сдвиг токов в обмотках по фазе на некоторый угол).
Пусковая обмотка включается только при пуске. Благодаря ей в двигателе образуется вращающийся магнитный поток и появляется вращающий момент М‘, причем пусковой момент М‘п > 0.


Двигатель трогается с места и разгоняется в соответствии с зависимостью М‘(s). Разгон двигателя заканчивается в точек 1′, когда вращающий момент становится равным тормозному (М‘ = Мт). После этого пусковую обмотку отключают. Теперь магнитный поток создается только рабочей обмоткой. В этом режиме имеется вращающий момент М. При отключении пусковой обмотки благодаря инерции массы частота вращения ротора не изменится, скольжение останется равным s’1, а рабочей точкой становится точка 2 на кривой М(s). Так как тормозной момент Мт останется неизменным, то точки 2 имеем М


Возможные схемы включения трехфазных АД в однофазную сеть.
Устройство для динамического торможения однофазного асинхронного конденсаторного двигателя
В статье дается описание простого устройства для пуска и торможения однофазного асинхронного конденсаторного двигателя с короткозамкнутым ротором, в котором вспомогательная обмотка включена параллельно главной через рабочий конденсатор.
Предлагаемое техническое решение предназначено для динамического торможения однофазных электродвигателей, имеющих главную и вспомогательную обмотки на статоре и рабочий фазосдвигающий конденсатор.
Известны схемы для динамического торможения однофазных электродвигателей, в которых эффект торможения достигается путем разряда заряженного конденсатора на обмотку электродвигателя при отключении его от сети [1].
Недостатком данных схем является то, что емкость конденсатора должна соответствовать мощности электродвигателя. С увеличением мощности двигателя емкость конденсатора получается очень большой, и использовать практически такую схему торможения невыгодно из-за увеличения веса, габаритов и стоимости конденсатора. Кроме того, конденсатор в этих схемах используется только для осуществления режима динамического торможения.
Наиболее близким по технической сущности к предлагаемому решению является однофазный электродвигатель с устройством для динамического торможения, содержащий параллельно соединенные главную и вспомогательную обмотки, фазосдвигающий элемент, соединенный последовательно с вспомогательной обмоткой, однополюсный переключатель на два положения, общий контакт которого соединен с точкой соединения фазосдвигающего элемента с главной обмоткой, цепочку из последовательно соединенных диода, резистора и тормозного конденсатора, подключенную к зажимам главной обмотки и реле [2].
Недостатком такого устройства является относительно невысокий тормозной момент, так как в режиме торможения используется только одна из обмоток электродвигателя.
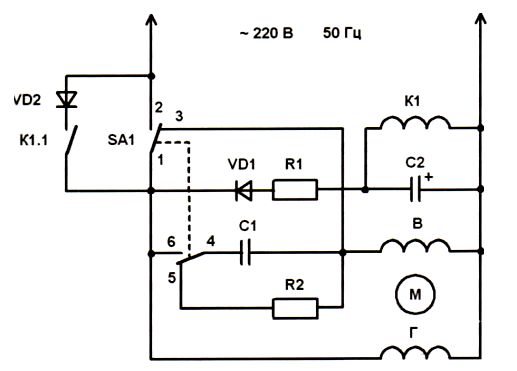
На рис. 1 показана схема включения для динамического торможения конденсаторного однофазного асинхронного электродвигателя (КОАД), которая свободна от указанного недостатка (авторское свидетельство автора статьи [3]).
Описание устройства
Устройство содержит двухполюсный переключатель SA1 на два положения, с помощью которого к питающей сети подключается главная обмотка «Г» двигателя, вспомогательная обмотка «В» через фазосдвигающий элемент С1 и последовательная цепочка из диода VD1, токоограничивающего резистора R1, тормозного конденсатора С2, к зажимам которого присоединена обмотка К1 герконового реле. Контакты 1-2 переключателя SA1 в цепи главной обмотки «Г» двигателя шунтированы последовательной цепочкой из контактов К1.1 герконового реле К1 и диода VD2. В исходном предпусковом положении фазосдвигающий элемент С1 шунтирован резистором R2 через замкнутые контакты 4-5 переключателя SA1, а контакты К1.1 реле разомкнуты.
Принцип действия
Включение КОАД осуществляют переключателем SA1, при этом обтекается током главная обмотка «Г» двигателя через контакты 1-2 и вспомогательная «В» через контакты 4-6 переключателя и фазосдвигающий элемент С1. Двигатель запускается при этом, одновременно обтекается током последовательная цепочка из диода VD1, токоограничивающего резистора R1, тормозного конденсатора С2. Последний заряжается, и величина тока, протекающая по нему, уменьшается, а через обмотку К1 герконового реле увеличивается. При определенном токе обмотки К1 поле, создаваемое ею, будет достаточным для замыкания контактов К1.1 герконового реле, причем контакты К1.1 будут находиться все время в замкнутом состоянии за счет заряженного конденсатора С2.
Последовательная цепочка из диода VD2 и контактов К1.1 герконового реле К1 шунтируется через замкнутые контакты 1-2 переключателя SA1.
При отключении КОАД от сети переключателем SA1 контактами 4-6 разрывается цепь питания конденсатора С1, который через контакты 4-5 шунтируется резистором R2, а обмотки КОАД через контакты 1 -3 переключателя соединяются параллельно и обтекаются выпрямленным током сети через элементы VD2 и К1.1. В результате чего двигатель эффективно тормозится. По окончании разряда тормозного конденсатора С1 на обмотку К1 герконового реле, последнее размыкает свои контакты К1.1 в цепи диода VD2, отключая тем самым обмотки «Г» и «В» двигателя от сети.
Устройство обеспечивает эффективное динамическое торможение КОАД, а также уменьшение искрения контактов переключателя SA1 при отключении двигателя за счет шунтирующего действия цепочки VD2-K1.1, что увеличивает надежность его работы.
Устройство может быть использовано не только для маломощных электродвигателей, но и для машин большой мощности, так как емкость тормозного конденсатора не зависит от мощности электродвигателя.
Детали
Выключатель SA1 любой малогабаритный двухполюсный на два положения, подходящий по току и напряжению, например, типа П2Т-13 220В-3А или ТП1-2 220В-2А.
Диод VD1 типа КД105В,Г (0,3 А, 600 В, 800 В); КД209Б,В (0,5 А, 600 В, 800 В) или 1N4007, 1 А, 1000 В. Диод VD2 типа КД202М, Р на ток 3 А и напряжение 500 В и 600 В соответственно для двигателей мощностью до 600 Вт может быть заменен диодом Д248Б или Д234Б.
Резисторы R1 и R2 типа МЛТ-2 сопротивлением 3 кОм и 5,6 кОм соответственно.
Конденсатор С1 подбирают примерно из расчета 6,6…7,0 мкФ на 100 Вт мощности двигателя типа МБГО-2, КБГ-МП, БГТ на напряжение не ниже 400 В или типа МБГЧ, что предпочтительней. Конденсатор С2 типа КЭ-2, ЭМ или импортный 100… 150 мкФ 50…100 В.
Герконовое реле К1 состоит из катушки от реле МКУ-48 на 48 В, в отверстии которой установлен геркон на ток, соответствующий мощности КОАД. Вместо герконового реле может быть использовано промежуточное реле переменного тока на напряжение 220 В, с контактной группой на 5 А, типа РП-21 или, соответственно, реле типа РП-25 и МКУ-48.
Наладка
Наладка устройства заключается в уточнении величины сопротивления резистора R1 и емкости конденсатора С2 для получения задержки на отпускание контактов К1.1 реле К1 в пределах 2…3 с, которую можно осуществить без подключения КОАД к сети. Это время можно окончательно уточнить при подключенном двигателе, чтобы оно совпало примерно со временем его остановки, тоесть отсутствовал бы свободный выбег ротора КОАД при работе в режиме торможения.
Литература
- Патент Швейцарии №452040, кл. Н 02 Р 3/24, 1969.
- Патент США №3798523, кл. 318-212, 1974.
- Авторское свидетельство №813641 СССР, М. Кл 3 . Н 02 Р 3/24, Н02 К 17/04. Однофазный асинхронный электродвигатель с устройством для динамического торможения / К.В. Коломойцев (СССР). — №2692759/24-07: заяв. 07.12.78; опуб. 15.03.81 Бюл. №10.
Автор: Константин Коломейцев, г. Ивано-Франковск

