Асинхронный двигатель моментная характеристика
Асинхронный двигатель моментная характеристика
Главное меню
- Главная
- Паровые машины
- Двигатели внутреннего сгорания
- Основные понятия о двигателях внутреннего сгорания
- Топлива применяемые в двигателях и реакция сгорания
- Смесеобразования и воспламенения в двигателях
- Выпуск и продувка в двухтактных двигателях
- Теплоиспользование в двигателях
- Тепловой расчет двигателя
- Основные узлы двигателей
- Топливная аппаратура и система зажигания
- Пусковые устройства
- Охлаждение и смазка двигателя
- Вспомогательные устройства двигателей
- Примеры конструкций двигателей
- Эксплуатация и ремонт двигателя
- Двигатели внутреннего сгорания на электростанциях
- Наддув двигателей внутреннего сгорания
- Комбинированные двигатели и генераторы газа
- Схемы наддува в двухтактных малооборотных дизелях
- Проблемы наддува в двухтактных малооборотных дизелей
- Среднеоборотные судовые и стационарные дизели
- Высокооборотные дизели для приводов судов и тепловозов
- Дизели с принудительным зажиганием
- Автомобильные двигатели с принудительным зажиганием
- Уравновешивание осевых усилий турбокомпрессора
- Конструкция подшипников и смазка турбокомпрессора
- Расположение подшипников турбокомпрессора
- Материал и изготовление турбинных колес ротора турбокомпрессора
- Материал и изготовление колес компрессоров ротора турбокомпрессора
- Конструкция колес ротора турбокомпрессора
- Число ступеней ротора турбокомпрессора
- Система наддува «Гипербар»
- Система наддува «Компрекс»
- Двухступенчатый наддув
- Применение системы Миллера в газовых двигателях
- Применение системы Миллера на четырехтактных дизелях
- Способ наддува Франка Миллера
- Турбодетандерное охлаждение газовых двигателей
- Турбодетандерное охлаждение четырехтактных дизелей
- Разделение выпуска системы наддува
- Дозарядка систем наддува
- Влияние наддува на качество выпускных газов двигателя с принудительным зажиганием
- Влияние наддува на качество выпускных газов дизеля
- Влияние высоты над уровнем моря при эксплуатации двигателей без наддува
- Меры для улучшения приемистости и характеристики крутящего момента двигателей с турбонаддувом
- Характеристика крутящего момента двигателей с турбокомпрессором
- Приемистость двигателей с турбокомпрессором
- Разновидности импульсного наддува
- Преимущества и недостатки систем импульсного наддува и наддува при постоянном давлении газов перед турбиной
- Группировка выпускных коллекторов при различных числах цилиндров и промежутках между вспышками
- Турбонаддув как средство повышения к.п.д.
- Влияние охлаждения надувочного воздуха
- Различия в удельном расходе топлива двигателя при механическом и газотурбинном наддуве
- Мощность затрачиваемая на привод компрессора
- Подпор до давления, в цилиндре, выталкивающим действием поршня
- Полное преобразование в кинетическую энергию при отсутствии противодавления на выпуске
- Работа газов от давления, в цилиндре, до противодавление за двигателем
- Температура конца расширения в цилиндре и средняя температура выпускных газов
- Замкнутый расчет равновесного состояния системы двигатель—турбокомпрессор
- Расчет импульсного наддува
- Расчет эквивалентного сечения турбины
- Рабочая точка турбокомпрессора
- Механический наддув компрессором
- Наддув в четырехтактных двигателях
- Примеры результатов расчетов с помощью метода наполнения — выпуска
- Номограмма для определения рабочей точки одноступенчатого турбокомпрессора
- Наддув в двухтактных двигателях
- Расходная характеристика двигателей
- Лопаточные компрессоры
- История создания авиационных двигателей
- Объемные компрессоры
- История создания первых дизели
- Конструкция и характеристики компрессоров
- История создания двигателей с принудительным зажиганием
- Способы наддува в двигателях внутреннего сгорания
- Шаговый расчет процесса газообмена
- Расчет количества продувочного воздуха всасываемого двигателем
- Коэффициент наполнения четырехтактных двигателей с наддувом
- Взаимосвязь между количеством заряда в цилиндре и средним индикаторным давлением
- Взаимосвязь между массовым расходом воздуха и мощностью двигателя
- Расчеты мощности компрессора наддува
- Развитие газотурбинного наддува в дизельных двигателях
- Электродвигатели
- Автоматическое регулирование двигателей
- Восстановление и ремонт двигателей СМД
- Топливо для двигателей
- Карта сайта
Судовые двигатели
- Судовые двигатели внутреннего сгорания
- Судовые паровые турбины
- Судовые газовые турбины
- Судовые дизельные установки
Анализ работы асинхронного электродвигателя удобно проводить на основе его механических характеристик, представляющих собой графически выраженную зависимость вида п = f(М). Скоростными характеристиками в этих случаях пользуются весьма редко, так как для асинхронного электродвигателя скоростная характеристика представляет собой зависимость числа оборотов от тока ротора, при определении которого встречается ряд трудностей, особенно, в случае асинхронных электродвигателей с короткозамкнутым ротором.
Для асинхронных электродвигателей, так же как и для электродвигателей постоянного тока, различают естественные и искусственные механические характеристики. Асинхронный электродвигатель работает на естественной механической характеристике в том случае, если его статорная обмотка подключена к сети трехфазного тока, напряжение и частота тока которой соответствует номинальным значениям, и если в цепь ротора не включены какие-либо дополнительные сопротивления.
На рис. 42 была приведена зависимость М = f(s), которая позволяет легко перейти к механической характеристике n = f( M ), так как, согласно выражению (82), от величины скольжения зависит скорость вращения ротора.
Подставив формулу (81) в выражение (91) и решив полученное уравнение относительно п 2 получим следующее уравнение механических характеристик асинхронного электродвигателя

Член r 1 s опущен, ввиду его малости. Механические характеристики, соответствующие этому уравнению, приведены на рис. 44.

Для практических построений уравнение (95) неудобно, поэтому на практике обычно пользуются упрощенными уравнениями. Так, в случае работы электродвигателя на естественной характеристике при вращающем моменте, не превышающем 1,5 его номинального значения, скольжение обычно не превышает 0,1. Поэтому для указанного случая в уравнении (95) можно пренебречь членом x 2 s 2 /kr’ 2 ·M , в результате чего получим следующее упрощенное уравнение естественной характеристики:

являющееся уравнением прямой линии, наклоненной к оси абсцисс.
Хотя уравнение (97) является приближенным, опыт показывает, что при изменениях момента в пределах от М = 0 до М=1,5М н характеристики асинхронных электродвигателей действительно прямолинейны и уравнение (97) дает результаты, хорошо согласующиеся с опытными данными.
При введении в цепь ротора дополнительных сопротивлений характеристику п = f(М) с достаточной для практических целей точностью также можно считать прямолинейной в указанных пределах для вращающего момента и производить ее построение по уравнению (97).
Таким образом, механические характеристики асинхронного электродвигателя в диапазоне от М = 0 до М = 1,5 М н при различных сопротивлениях роторной цепи представляют семейство прямых, пересекающихся в одной точке, соответствующей синхронному числу оборотов (рис. 45). Как показывает уравнение (97), наклон каждой характеристики к оси абсцисс определяется величиной активного сопротивления роторной цепи r’ 2 . Очевидно, чем больше сопротивление, введенное в каждую фазу ротора, тем больше наклонена к оси абсцисс характеристика.

Как указывалось, обычно на практике скоростными характеристиками асинхронных электродвигателей не пользуются. Расчет же пусковых и регулировочных сопротивлений производят с помощью уравнения (97). Построение естественной характеристики можно выполнить по двум точкам — по синхронной скорости n 1 = 60f /р при нулевом моменте и по номинальной скорости при номинальном моменте.
Следует иметь в виду, что для асинхронных электродвигателей зависимость момента от тока ротора I 2 носит более сложный характер, чем зависимость момента от тока якоря для

электродвигателей постоянного тока. Поэтому скоростная характеристика асинхронного двигателя неидентична механической характеристике. Характеристика п = f(I 2 ) имеет вид, показанный на рис. 46. Там же дана характеристика n = f (I 1 ).
Синхронные реактивные двигатели (СРД)
Введение
 Появление электрического двигателя во многом способствовало развитию промышленности и улучшению качества жизни населения. В рамках второй промышленной революции произошла популяризация всех видов электрических машин, и теперь для многих создается впечатление, что эти устройства всегда находились на службе у человечества. На сегодняшний день известно множество разновидностей электрических двигателей, от широко известных двигателей постоянного тока (ДПТ), асинхронных двигателей (АД), синхронных двигателей (СД) до шаговых двигателей (ШД). Несмотря на глобальные различные, все они выполняют одну функцию – являются электромеханическими преобразователями, то есть конвертируют электрическую энергию в механическую.
Появление электрического двигателя во многом способствовало развитию промышленности и улучшению качества жизни населения. В рамках второй промышленной революции произошла популяризация всех видов электрических машин, и теперь для многих создается впечатление, что эти устройства всегда находились на службе у человечества. На сегодняшний день известно множество разновидностей электрических двигателей, от широко известных двигателей постоянного тока (ДПТ), асинхронных двигателей (АД), синхронных двигателей (СД) до шаговых двигателей (ШД). Несмотря на глобальные различные, все они выполняют одну функцию – являются электромеханическими преобразователями, то есть конвертируют электрическую энергию в механическую.
А теперь представьте себе электрический двигатель с максимально простой конструкцией ротора. Это сделать довольно-таки сложно из-за сложившихся стереотипов о функционировании электрической машины, но именно так можно вкратце описать набирающие популярность Синхронные Реактивные Двигатели (с англ. Synchronous Reluctance Machine, СРД). В последнее время на эти электрические машины все больше обращают внимание производители двигателей, а также инжиниринговые компании по всему миру, и не случайно. Давайте разберемся, что же из себя представляют СРД.
Синхронный Реактивный Электродвигатель – синхронная машина, вращающий момент которой обусловлен неравенством магнитных проводимостей по поперечной и продольной осям ротора, не имеющего обмоток возбуждения или постоянных магнитов – такое определение дает ГОСТ 27471-87.
Принцип работы синхронного реактивного двигателя
Переменный ток, проходящий по обмоткам статора, создает вращающееся магнитное поле в воздушном зазоре электродвигателя. Крутящий момент создается когда ротор пытается установить свою наиболее магнито — проводящую ось (d-ось) с приложенным к нему полем, чтобы минимизировать сопротивление в магнитной цепи. Иными словами, вращающееся магнитное поле статора увлекает за собой ротор. Амплитуда потока статора управляется через ось d, тогда как ток, отвечающий за момент управляется через ось q. Оси приведены к статору двигателя.
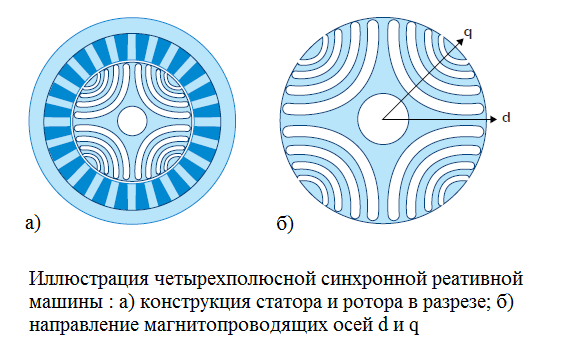
В рассмотренном исполнении ротора разницы между магнитными сопротивлениями осей добиваются за счет увеличения воздушного зазора по оси q. Амплитуда момента прямо пропорциональна разнице между продольной Ld и поперечной Lq индуктивностями. Следовательно, чем больше разница, тем больше создаваемый момент. Математически это можно выразить с некоторыми допущениями, рассмотрев формулу электромагнитного момента для синхронной явнополюсной машины без возбуждения на роторе:
Мр = [mU 2 /(2ω1 )] (1/Хq — 1/Хd ) sin 2θ,
где m=3 для трехфазного исполнения статора, ω1- угловая скорость ротора, Xq -индуктивное сопротивление по оси q ротора, Xd — индуктивное сопротивление по оси d ротора, θ-угол между полем ротора и полем статора, характеризующий степень растянутости «магнитной пружины».
Таким образом, в отличие от синхронной машины с обмоткой возбуждения, синхронная реактивная машина в классическом представлении имела меньший момент, а также невысокий коэффициент мощности и коэффициент полезного действия (КПД). Объяснялось это значительным намагничивающим током статора, так как возбуждение происходит за счет реактивной составляющей тока. Пуск таких двигателей осуществлялся за счет демпфирующей короткозамкнутой обмотки, т.е. имел место асинхронный пуск синхронного двигателя. Но на сегодняшний день, СРД успешно эксплуатируются в комплекте с преобразователями частоты (ПЧ) YASKAWA GA700 и ПЧ GA500. Пуск происходит благодаря алгоритму, заложенному в ПЧ (управление током намагничивания id статора и током статора, отвечающим за момент iq), следовательно, необходимость асинхронного пуска устраняется. В итоге, коэффициент мощности и КПД у современных СРД заметно увеличился, а конструкция ротора стала максимально простой. В среднем у синхронных реактивных двигателей остается худший коэффициент мощности на 5-10% из-за принципиальных особенностей работы, но на 5- 8 % лучший КПД в сравнении с асинхронными двигателями как в номинальном режиме, так и при работе на всем диапазоне скоростей при регулировании скорости вниз от номинала.
Наибольший интерес у разработчиков систем электропривода вызвала конструкция СРД. Статор реактивного двигателя бывает с распределенной и сосредоточенной обмоткой. То есть, статор двигателя идентичен статору широко используемого асинхронного двигателя.
Особенно интересен ротор, который представляет собой вал с болванкой из шихтованной стали. На роторе отсутствуют обмотки, а также постоянные магниты.
Выделяют три основных типа ротора реактивного двигателя: ротор с явно выраженными полюсами, аксиально-расслоенный ротор и поперечно-расслоенный ротор.
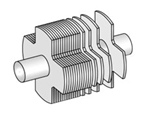 а) Ротор с явно выраженными полюсами
а) Ротор с явно выраженными полюсами
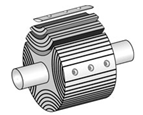 б) Аксиально-расслоенный ротор
б) Аксиально-расслоенный ротор
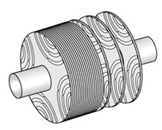 в) Поперечно-расслоенный ротор
в) Поперечно-расслоенный ротор
Отличительная особенность синхронных реактивных двигателей (СРД) — отсутствие в них возбуждения со стороны ротора. Основной магнитный поток в этом двигателе создается исключительно за счет вращающейся МДС обмотки статора.
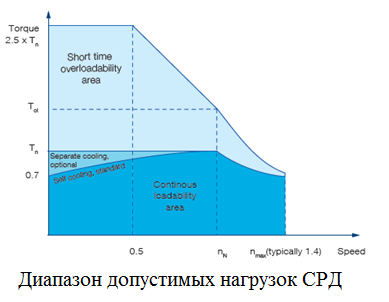
Так как, СРД – синхронная машина, то его механическая характеристика в разомкнутой системе будет абсолютно жесткой.
Достоинства и недостатки синхронного реактивного двигателя:
Преимущества СРД:
1. Простота и надежность ротора, состоящего из тонколистовой электротехнической стали, без магнитов и короткозамкнутой обмотки;
2. Низкий нагрев. Так как в роторе нет обмоток, поэтому через него не протекает активный ток с выделением тепла. Это положительно сказывается на сроке жизни подшипников, а также на коэффициенте полезного действия системы. Так как снижаются потери на нагрев, то номинальный ток двигателя может быть завышен, что позволяет получить (при аналогичной мощности) более высокий момент (на 20-40%), чем у асинхронного двигателя.
3. Отсутствие магнитов. Из-за этого снижается конечная цена двигателя, так как при производстве не используются редкоземельные элементы.
4. Низкий момент инерции ротора. Так как ротор представляет собой болванку без магнитов и обмоток, которые увеличивают этот показатель в асинхронных двигателях и двигателях с постоянными магнитами. Соответственно, уменьшается типоразмер двигателей. Из чего вытекает следующее преимущество.
5. Меньшие габариты при той же мощности в сравнении с АД.
6. Высокий КПД и cosφ (косинус фи). При работе от сети, а такие двигатели в старых системах работали от сети и снабжались дополнительной пусковой обмоткой на роторе, СРД демонстрировали не лучшие энергетические показатели, но применяя специализированный преобразователь частоты, например, YASKAWA GA700 и GA500, разработанный для работы с синхронными реактивными двигателями, картина в корне меняется. В таких преобразователях происходит разделение между сетью и питающим напряжением двигателя, а программное обеспечение позволяет корректировать выходной ток, создавая наиболее благоприятные условия работы двигателя (в GA700 режим EZOLV). Таким образом СРД оставляет за собой все преимущества, описанные выше, избегая недостатков возникавших ранее при работе от сети. Если все – таки происходит снижение коэффициента мощности, это может означать, что для данного применения должен быть выбран преобразователь на больший номинальный ток.
7. Абсолютно жесткая механическая характеристика в разомкнутой системе. Это говорит о том, что двигатель способен поддерживать скорость на заданном уровне с большой точностью, до тех пор, пока момент не превысит максимальное значение.
Недостатки СРД:
1. Пуск и работа СРД возможны только от преобразователя частоты. Бездатчиковая система управления отслеживания положения ротора является необходимым условием работы синхронного реактивного двигателя. Преобразователь в каждый момент времени отслеживает потребляемый ток двигателя, так как при повороте вала изменяется магнитное сопротивление в зазоре, и формирует магнитное поле в соответствии с этим изменением, добиваясь высокой производительности.
2. Низкий коэффициент мощности при работе с ослаблением поля. СРД демонстрируют лучшие энергетические показатели при работе в зоне насыщения. При выходе на повышенную скорость, необходимо уменьшить ток намагничивания машины id, в результате чего, заметно упадет момент двигателя, а коэффициент мощности резко снизится в следствие потребления большего реактивного тока. Поэтому для применений в которых осуществляется работа на повышенных скоростях такие двигатели лучше не использовать.
Заключение:
Синхронные реактивные двигатели являются перспективным направлением для интеграции в новые системы и для модернизации старых систем электропривода. Больший КПД на всем диапазоне скоростей в сравнении с СДПМ и АД способствует в пользу выбора этого двигателя при разработке новых систем, соответствующих международному стандарту энергоэффективности IE4. Простота конструкции ротора и проверенная технология изготовления статора позволяют такому двигателю легко найти свое применение в насосных агрегатах и вентиляторах, а также в применениях с постоянным моментом и регулированием скорости вниз от номинала. Единственной проблемой такого двигателя является потребление большего реактивного тока в сравнении с асинхронными двигателями, но при использовании частотного преобразователя YASKAWA GA700 и GA500 этот недостаток легко устраняется.
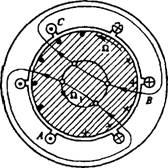
Асинхронный двигатель с массивным ротором
Ротор этого двигателя представляет собой сплошной ферромагнитный цилиндр (рис. ). Такой ротор играет одновременно роли магнитопровода и токопровода. Вращающееся магнитное поле проникает на определенную глубину в тело ротора и индуктирует в нем вихревые токи. Эти токи при взаимодействии с магнитным полем образуют электромагнитный момент. Вследствие сильно выраженного поверхностного эффекта вихревые токи протекают в сравнительно тонком слое на глубине проникновения электромагнитного поля в тело ротора. Эквивалентная глубина проникновения зависит от частоты перемагничивания ротора. Для двигателя, рассчитанного на частоту 50 Гц, эквивалентная глубина проникновения при пуске (5=1) составляет только 1—3 мм, в рабочем режиме при s = 0,05 — примерно 5—15 мм. Вообще в линейном приближении глубина проникновения изменяется обратно пропорционально +fs . Это приводит к соответствующему изменению сечения слоя, по которому протекают вихревые токи, активного сопротивления массивного ротора.
Асинхронный двигатель
В результате такого проявления с массивным ротором поверхностного эффекта пусковой момент в двигателе с массивным ротором достаточно велик, и он уступает двигателю с короткозамкнутой обмоткой на роторе только по своим рабочим свойствам — КПД и коэффициенту мощности. Объясняется это тем, что в номинальном режиме при скольжении s = 0,1 -5-0,5 глубина проникновения тока и потока в тело ротора еще достаточно мала, а электрическое сопротивление для тока и магнитное сопротивление для потока велики, вследствие чего двигатель имеет большие электрические потери в роторе и большой намагничивающий ток.
Для улучшения рабочих характеристик иногда прикрепляют с двух сторон к торцевым поверхностям цилиндрического ротора медные короткозамыкающие кольца. Медные кольца имеют значительно меньшее удельное электрическое сопротивление, чем стальное тело ротора, и выполняют ту же роль, что и торцевые короткозамыкающие кольца беличьей клетки. В результате активное сопротивление массивного ротора уменьшается за счет увеличения электрической проводимости торцевых частей. С этой же целью в микродвигателях прибегают к покрытию внешней поверхности массивного ротора тонким слоем меди толщиной 0,1—0,3 мм. Кроме того, можно добиться улучшения рабочих характеристик подбором такого материала для массивного ротора, который обладал бы оптимальными электрической и магнитной проводимостями. В этом направлении в последнее время достигнуты определенные успехи. Получены сплавы, обладающие большей электрической проводимостью и меньшей магнитной проницаемостью, чем у стали, при применении которых глубина проникновения поля существенно возрастает и технические показатели улучшаются.
Применение массивного ротора, обладающего большой механической прочностью, позволяет построить асинхронные двигатели на весьма высокие частоты вращения (10 000—100 000 об/мин и более). Такие двигатели предназначаются для питания от источников повышенной частоты (400—1500 Гц и более) и находят применение в специальных электроприводах, например гироскопических устройствах.
Несмотря на технологичность конструкции двигателей с массивным ротором, в общепромышленном электроприводе они пока не применяются. Это связано исключительно с их недостаточно высокими энергетическими показателями в рабочих режимах.
Интересной разновидностью рассматриваемого двигателя является двигатель с полым магнитным ротором, В этом двигателе в целях уменьшения массы и момента инерции ротор выполняется в виде полого сплошного ферромагнитного цилиндра. Толщина его стенок может быть выбрана равной глубине проникновения в рабочих режимах. При частотах 400—1000 Гц она составляет 0,3—0,5 мм и 1 — 3 мм при 50 Гц.
Поскольку магнитный поток замыкается по стенкам полого магнитного ротора, в двигателе с таким ротором нет необходимости во внутреннем статоре. Этим он выгодно отличается от двигателя с полым немагнитным ротором. Однако из-за довольно низких КПД и cos ф, а также других недостатков двигатели с полым магнитным ротором имеют ограниченное распространение.
Что такое асинхронный двигатель и как он работает
Асинхронный двигатель простой и надежный и от этого очень часто используется на производстве и в бытовой технике, от привода задвижек до вращения барабана в стиральной машине. В этой статье мы простыми словами расскажем о том какие бывают асинхронные электродвигатели, что это такое и как работает данный тип электрических машин.
- Виды
- Устройство
- Принцип работы
- Скольжение и скорость вращения
- Сфера применения
Асинхронные двигатели (АД) делятся на две основные группы:
- с короткозамкнутым ротором (КЗ);
- с фазным ротором.
Если опустить нюансы, то отличие заключается в том, что у АД с короткозамкнутым ротором нет щеток и выраженных обмоток, он менее требователен в обслуживании. Тогда как в асинхронных двигателях с фазным ротором есть три обмотки, соединенные с контактными кольцами, ток с которых снимается щетками. В отличие от предыдущего лучше поддаётся регулированию момента на валу и проще реализуется плавный запуск для снижения пусковых токов.
В остальном двигатели классифицируют:
- по количеству питающих фаз — однофазные и двухфазные (используются в быту при питании от сети 220В), и трёхфазные (получили наибольшее распространение на производстве и в мастерских).
- по способу крепления — фланцевое или на лапах.
- по режиму работы — для длительного, кратковременного или повторно-кратковременного режима.
И ряду других факторов, которые влияют выбор конкретного изделия для использования в конкретных условиях.
Об однофазных электродвигателях можно сказать много: некоторые из них запускаются через конденсатор, а некоторым требуется и пусковая и рабочая ёмкость. Есть и варианты с короткозамкнутым витком, которые работают без конденсатора и применяются, например, в вытяжках. Если вам интересно — пишите в комментариях и мы напишем об этом статью.
Устройство
По определению «асинхронным» называют двигатель переменного тока, у которого ротор вращается медленнее чем магнитное поле статора, то есть несинхронно. Но это определение не слишком информативно. Чтобы его понять нужно разобраться как устроен этот двигатель.
Асинхронный двигатель, как и любой другой состоит из двух основных частей — ротор и статор. «Для чайников» в электрике расшифруем:
- Статором называют неподвижную часть любого генератора или электродвигателя.
- Ротором называют вращающуюся часть двигателя, которая и приводит в движение механизмы.

Статор состоит из корпуса, торцы которого закрываются подшипниковыми щитами, в которых установлены подшипники. В зависимости от назначения и мощности двигателя используют подшипники скольжения или качения. В корпусе расположен сердечник, на нём установлена обмотка. Её называют обмоткой статора.

Так как ток переменный, чтобы снизить потери из-за блуждающих токов (токи Фуко) сердечник статора набирают из тонких стальных пластин, изолированных друг от друга окалиной и скрепленных лаком. На обмотки статора подают питающее напряжение, ток протекающий в них называют током статора.
Количество обмоток зависит от числа питающих фаз и конструкции двигателя. Так у трёхфазного двигателя минимум три обмотки, соединённых по схеме звезды или треугольника. Их количество может быть больше, и оно влияет на скорость вращения вала, но об этом мы поговорим далее.
А вот с ротором дела обстоят интереснее, как уже было сказано он может быть или короткозамкнутым, или фазным.

Короткозамкнутый ротор — это набор металлических стержней (обычно алюминиевых или медных), на рисунке выше обозначены цифрой 2, впаянных или залитых в сердечник (1) замкнутых между собой кольцами (3). Такая конструкция напоминает колесо, в котором бегают одомашненные грызуны, отчего её часто называют «беличьей клеткой» или «беличьим колесом» и такое название не жаргонное, а вполне литературное. Для уменьшения высших гармоник ЭДС и пульсации магнитного поля, стержни укладывают не вдоль вала, а под определенным углом относительно оси вращения.
Фазный ротор отличается от предыдущего тем, что на нем уже есть три обмотки, как на статоре. Начала обмоток подключаются к кольцам, обычно медным, они напрессованы на вал двигателя. Позже мы кратко объясним зачем они нужны.

В обоих случаях, один из концов вала соединяют с приводимым в движение механизмом, он выполняется конической или цилиндрической формы с проточками или без, для установки фланца, шкива и других механических приводных деталей.
На «задней» части вала закрепляют крыльчатку, которая необходима для обдува и охлаждения, поверх крыльчатки на корпус надевается кожух. Таким образом холодный воздух направляется вдоль ребер асинхронного двигателя, если эта крыльчатка по какой-то причине не будет вращаться — он перегреется.

Конструкция первого асинхронного двигателя была разработана М.О. Доливо-Добровольским и запатентовал он её в 1889 г. Без особых изменений дожила до настоящего времени.
Принцип работы
Асинхронные электрические машины часто называют индукционными, это связано с их принципом действия. Любой электродвигатель приводится во вращение в результате взаимодействия магнитных полей ротора и статора, а также благодаря силе Ампера. Магнитное поле, в свою очередь, может существовать либо вокруг постоянного магнита, либо вокруг проводника, через который протекает ток. Но как работает именно асинхронная машина?
В асинхронном двигателе в отличие от других нет как таковой обмотки возбуждения, тогда как у него появляется магнитное поле? Ответ прост: асинхронный электродвигатель – это трансформатор.
Рассмотрим принцип его работы на примере трёхфазной машины, так как именно они встречаются чаще остальных.
На рисунке ниже вы видите расположение обмоток на сердечнике статора трёхфазного асинхронного двигателя.
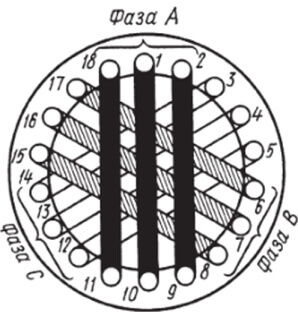
В результате протекания трёхфазного тока в обмотках статора появляется вращающееся магнитное поле. Из-за сдвига фаз ток протекает то по одной, то по другой обмотке, в соответствии с этим возникает магнитное поле, полюса которого направлены согласно правилу правой руки. И в соответствии с изменением тока в той или иной обмотке полюса направляются в соответствующую сторону. Что иллюстрирует следующая анимация:

В простейшем (двух полюсном) случае обмотки уложены таким образом, что каждая из них смещена на 120 градусов относительно предыдущей, как и угол сдвига фаз напряжения в сети переменного тока.
Скорость вращения магнитного поля статора принято называть синхронной. Подробнее о том, как оно вращается, и почему вы узнаете из следующего видеоролика. Отметим, что в двухфазных (конденсаторных) и однофазных электродвигателях — оно не вращающееся, а эллиптическое или пульсирующее, а обмоток не 3, а 2.
Если рассматривать асинхронный электродвигатель с короткозамкнутым ротором, то магнитное поле статора индуцирует в его стержнях ЭДС, так как они замкнуты, то начинает протекать ток. Из-за чего также возникает магнитное поле.
В результате взаимодействия двух полей и силе Ампера, действующей на ротор, он начинает вращаться вслед за вращающимся магнитным полем статора, но при этом всегда немного отставая от скорости вращения МП статора, это отставание называют скольжением.
Если скорость вращения магнитного поля называют синхронной, то скорость вращения ротора уже асинхронной, от чего он и получил такое название.
У АД с фазным ротором дела обстоят подобным образом, за исключением того, что к его кольцам подключают реостат, который после того как двигатель выйдет на рабочий режим выводится из цепи и обмотки замыкаются накоротко. Это показано на схеме ниже, но вместо реостата использованы постоянные резисторы, подключаемые или шунтируемые контакторами КМ3, КМ2, КМ1.
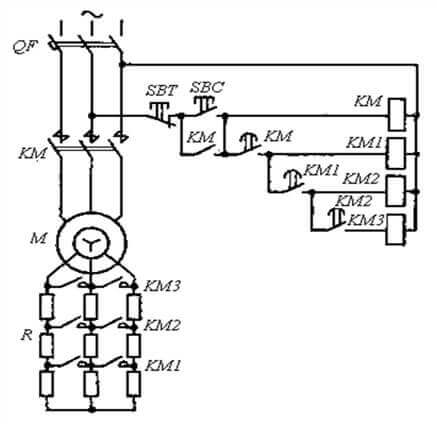
Такой подход позволяет осуществлять плавный запуск и снижать пусковые токи, за счет увеличения активного электрического сопротивления ротора.
 Подведем итоги:
Подведем итоги:
- Ток в обмотках статора порождает магнитное поле.
- Магнитное поле приводит к возникновению тока в роторе.
- Ток в роторе к возникновению поля вокруг него.
- Так как поле статора вращается, то из-за своего поля ротор начинает вращаться за ним.
Скольжение и скорость вращения
Частота вращения магнитного поля статора (n1) больше, чем частота вращения ротора (n2). Разница между ними называется скольжением, а обозначается латинской буквой S и вычисляется по формуле:
Скольжение не является недостатком этого электродвигателя, поскольку если бы его вал вращался с той же частотой, что и магнитное поля статора (синхронно), то в его стержнях не индуцировался бы ток, и он бы просто не стал вращаться.
Теперь о более важном понятии — частота вращения ротора асинхронного электродвигателя. Она зависит от 3 величин:
- частота напряжения питающей сети (f);
- число пар магнитных полюсов (p);
- скольжение (S).
Число пар магнитных полюсов определяет синхронную скорость вращения поля и зависит от числа обмоток статора. Скольжение зависит от нагрузки и конструкции конкретного электродвигателя и лежит в пределах 3-10%, то есть асинхронная скорость совсем немного меньше синхронной. Ну а частота переменного тока у нас фиксирована и равняется 50 Гц.
Поэтому частоту вращения вала асинхронного двигателя сложно регулировать, вы можете воздействовать лишь на частоту питающей сети, то есть установив частотный преобразователь. Можно и понижать напряжение статора, но тогда уменьшается мощность на валу, тем не менее такой приём применяют при пуске АД с переключением обмоток со звезды на треугольник для уменьшения пусковых токов.
Частота вращения поля статора (синхронная скорость) определяется по формуле:
Так в двигателе с одной парой магнитных полюсов (два полюса) синхронная скорость равна:
Наиболее распространены следующие варианты электродвигателей с:
- одной парой полюсов (3000 об/мин);
- двумя (1500 об/мин);
- тремя (1000 об/мин);
- четырьмя (750 об/мин).
Реальная скорость вращения ротора будет несколько ниже, на реальном асинхронном двигателе она указывается на шильдике, например, здесь – 2730 об/мин. Несмотря на это, в народе такой асинхронный двигатель будут называть согласно синхронной скорости или просто «трёхтысячник».

Тогда его скольжение равняется:
Сфера применения
Асинхронный электродвигатель нашел применение во всех сферах деятельности человека. Те что питаются от одной фазы (от 220В) можно встретить в исполнительных механизмах малой мощности или в бытовой технике и инструменте, например:
- в стиральной машине типа «малютка» и других старых советских моделей;
- в бетономешалке;
- в вентиляторе;
- в вытяжке;
- и даже в газонокосилках верхнего ценового сегмента.



На производстве в трёхфазных сетях:
- автоматические задвижки;
- грузоподъёмные механизмы (краны и лебедки);
- вентиляция;
- компрессоры;
- насосы;
- дерево- и металообрабатывающие станки и другое.




Также АД используется в электротранспорте, а в последнее время в интернете активно рекламируют асинхронный двигатель с обмоткой типа «Славянка» и, так называемое, мотор-колесо Дуюнова, о чем вы можете узнать из видеоролика разработчика.
Область применения асинхронных двигателей настолько обширна, что один только список будет длиннее чем эта статья, поэтому каждый электрик должен знать, как он устроен, для чего нужен и где применяется. Подведем итоги и перечислим плюсы и минусы этих устройств.
- Простая конструкция.
- Низкая стоимость.
- Почти не требуют обслуживания.
Главный недостаток — сложность регулировки оборотов, по сравнению с теми же двигателями постоянного тока или универсальными коллекторными машинами. Соответственно и сложно организовать плавный пуск больших машин, и чаще это делают с помощью дорогого частотного преобразователя.
На этом мы и заканчиваем рассмотрение асинхронных электродвигателей и их области применения. Надеемся, после прочтения статья вам стало понятно, что это такое и как работает данная электрическая машина!