Возможные неисправности шаговых двигателей
Установка тока шаговых двигателей 3D дельта принтера. Снижение резонансных вибраций
30.09.2016 Сайт https://anteh.ru
Они не позволяют установить максимальный паспортный ток шаговых двигателей 3х вертикальных X Y Z осей 1.7A (и это хорошо). Предельный ток для шагового двигателя экструдера(JK42HS40-1204D) 1.2A, для шаговых двигателей X Y Z осей(JK42HS60-1704A) 1.7А. Согласно документации максимальный ток у А4988 2A. Но у используемой платы драйвера A4988 его невозможно установить более 1.5A. Т.е. максимальный ток можно установить только для шагового двигателя экструдера. Связано с использованием вместо 20k резистора 30k в цепи формирования опорного напряжения платы драйвера. Сделано скорее для предотвращения перегрева и повреждения шаговых двигателей. Слишком большой ток может их повредить и в установке максимального тока нет необходимости, особенно для дельта принтера. Для дельта принтера ток устанавливаю на 30% меньше их максимального паспортного значения.
Забегая вперёд, использование дробления шага 1/32 вместо 1/16 не приведёт к увеличению разрешения принтера. Это приведёт к увеличению нагрева драйвера и двигателя, снижению момента двигателя. Не всегда использование 1/32 приведёт к снижению шума, как в режиме удержания, так и режиме хода. Поправить разрешение можно здесь. Всё будет зависеть от индивидуальных особенностей принтера, платы драйвера, шаговых двигателей. Причём оно настолько индивидуально, что при перестановке вроде бы одинаковых плат драйверов шум может уменьшиться или увеличится. Т.е. «шаманство» ещё то. В моём случае использование DRV8825 с дроблением 1/32 привело к существенному увеличению шума при удержании. Слабо уловимый свист А4988(Vref=1.2V=1.5A дробление 1/16) сменился на довольно заметное шипение/шелест DRV8825(Vref=0.85V=1.7A дробление 1/32) и только снижение тока до 0.9A поменяло шипение на еле различимый свист. Причём Y двигатель перестал шипеть при 1.2A, X при 1.1A, Z при 0.9. Перестановка одинаковых X Y Z драйверов меняет картину. В общем двигатель Y шипит/свистит существенно меньше остальных как с DRV8825 так и с А4988. Причём перестановка одинаковых драйверов меняет его шумность. Как видим всё не просто. Получается, для снижения шума нужно подбирать двигатели, драйвера, провода, мощность блока питания, напряжение питания двигателей, например поднять с 12 до 14V.
Субъективно показалось, что при 1/32 ход по Z более тихий, но были положения в которых двигатель начинал очень сильно «шелестеть» почти скрипеть и положения, в которых его было не слышно.
Фантазии по поводу разрешения. Для увеличения разрешения нужно использовать 0.9градусные двигатели вместо 1.8, с энкодером. Не дёшево и в ряде случаев это ничего, кроме опыта и морального удовлетворения не даст. Использую сопло 0.8мм толщина слоя 0.5мм, планирую на сопло 1.2 переходить. Диаметр стола 400 высота 835. Измеренная микрометром вертикальная погрешность, каждой из X Y Z осей используемого дельта принтера, при смене направления движения каретки 0.11мм. С такой погрешностью нет смысла о разрешении шагового двигателя беспокоиться, но это сравнительно малая погрешность. Используются рельсовые направляющие HIWIN, ремень GT2.
Это стандартные значения для 1.8град двигателя, дробление 1/16, ремень GT2 шаг 2мм и количество зубьев на шкиве двигателя =20. Для дробления 1/32 нужно установить Xsteps/mm, Ysteps/mm, Zsteps/mm в 160. Esteps не трогал, для него оставлен А4988.
Также можно в исходнике прошивки marlin поменять:
#define DEFAULT_AXIS_STEPS_PER_UNIT <80, 80, 80, 155>//
на:
#define DEFAULT_AXIS_STEPS_PER_UNIT <160, 160, 160, 155>//
При необходимости 4ре коэффициента можно вычислить так:
Для дельта принтера первые 3 коэффициента будут одинаковыми -это X Y X одинаковые двигатели.
360/1.8 = 200 шагов на оборот. 1.8 -угол шага.
(200*16)/(2*20) = 80 = (шагов на оборот * количество микро шагов устанавливается джамперами на RAMPS 1.4) /(приводной ремень GT2 с шагом 2 мм * 20-ти зубчатые шкивы на роторе шаговых двигателей каждой из XYZ осей)
Последний коэффициент экструдера рассчитывается так:
((200*16) / (d шкива подачи прутка * 3.14))*1.1 = (3200/(7.2мм*3.14))*1.1=
155
d шкива подачи прутка -это наименьший его диаметр в центе. Коэффициенты могут быть дробными.
Расчёт опорного напряжения, для выставления предельного тока драйвера делается так:
Для A4988:
Vrefэкструдер = 1.2А * 8 * 0.1Ом = 0.96V
Vrefxyz = 1.7А * 8 * 0.1Ом = 1.36V
Для DRV8825:
Vrefэкструдер = 1.2А * 5 * 0.1Ом = 0.6V
Vrefxyz = 1.7А * 5 * 0.1Ом = 0.85V
Значения можем уменьшить на 30%.
Для установки опорного напряжения используем любой мультиметр и отвёртку с изолированной ручкой. Включаем принтер, щуп минуса мультиметра на GND(земля) платы драйвера, плюс на движок подстроечного резистора -то что отвёрткой будем крутить. Двигатели должны быть отключены. Отвёрткой аккуратно выставляем нужное напряжение. Разные драйвера мешать можно, повторюсь соблюдайте правильную ориентацию установки драйвера, или приобретайте их с запасом.
На +5 и +12V была добавлена чип керамика 10u и 0.1u. И вместо +3.3V опоры, на подстроечный резистор, через 12k, были заведены +5V. Т.е. реализована схема как у A4988.
Ток был выставлен такой же, как и для A4988. Дробление задано такое же 1/16.
Результат:
С Vref всё было в порядке, субъективно, по показаниям осциллографа встроенные 3.3V лучше, чем внешние +5V. Т.е. предположение о повышенном шуме из-за нестабильности Vref было не верным. Доработка не нужна. Из произведённой доработки смысл есть оставить на +12V конденсаторы 10u и 0.1u.
Что касается акустического шума, с DRV8825 он субъективно стал меньше на 1/16. После autohome слышится ощутимый шелест, но при минимальном движении по X или Y наступает тишина, еле различимый свит, субъективно меньше, чем у A4988. Не обошлось без перестановки местами драйверов, шум при удержании снизился.
Единственно явное преимущество замены A4988 на DRV8825 -это снижение тепловыделения, можно смело палец на радиаторе держать сколько угодно долго. DRV8825 с током 1.2А. шаг дробления 1/16. Под платой драйвера первый второй джампера сняты, третий установлен. Если использовать шаг дробления 1/32 то тепловыделение будет больше, чем для A4988 c 1/16.
Из всего делаю выводы:
0. Со стабильностью Vref=3.3V у DRV8825 никаких проблем.
1. Для тестируемого принтера предпочтительно использование DRV8825 с шагом дробления 1/16 и с правильно выставленным током для используемой скорости печати. Снижает шум и в силу особенностей конструкции существенно снижает нагрев драйвера. Можно в цепь +12V на драйвер напаять конденсаторы, чип керамику, например 10u(или более) 25V 1206 и 0.1u 0805, хуже не будет.
2. Но если Вы решили собрать принтер сами, безопаснее использовать A4988, в отличие от DRV8825 у неё производитель выставляет безопасный ток 1A, предельный ток 1.5A, который при недосмотре не угробит, ни сам драйвер, ни двигатель. На A4988 можно в цепи питания +5 и +12V на драйвере напаять дополнительную чип керамику.
3. Единственное что позволило снизить шипение при удержании -это снижение тока и перестановка драйверов местами, дробление(для используемого принтера) осталось 1/16. DRV8825 субъективно начинал шипеть на большем токе, чем A4988. С DRV8825 печать различимо тише. Можно попробовать купить пачку другую шаговых двигателей и подобрать наименее шумные, вряд ли в этом есть смысл.
Реально и объективно замена A4988 на DRV8825, снизит тепловыделение при дроблении 1/16 и шум при печати. Перестановка драйверов местами может снизить шум/шелест при удержании двигателя. Снижение тока драйверов снижает шум, но нужно следить за отсутствием пропуска шагов. Для дельта принтера можно ставить ток на 30% и более % меньше максимального паспортного тока шагового двигателя, но нужно следить за отсутствием пропуска шагов и отсутствием вибраций эффектор. Использование дробления 1/32 увеличивает тепловыделение драйвера, снижает максимальную скорость печати и не всегда приводит к снижению аккустического шума и резонансных явлений.
Установка тока X Y Z драйверов дельта принтера
Последняя на 15.09.2016 прошивка marlin, меняем параметр DEFAULT_STEPPER_DEACTIVE_TIME с 60 на 600, чтобы двигатели не отключались через 60 секунд при простое:
#define DEFAULT_STEPPER_DEACTIVE_TIME 600
Команда autohome g28, включаем шаговые двигатели на удержание. Меряем и настраиваем токи XYZ драйверов, как 30% от максимального паспортного значения тока двигателя. По паспорту 1.7A настраиваем 1.2А.
Создаём или берём какую-либо длинную модель, растягиваем на весь рабочий стол, скорость печати задаём, например 35мм/сек, формируем G код. Высоту печати настраиваем, чтобы она началась на высоте, например 50мм от поверхности стола, филамент вытаскиваем из экструдера, реальная печать не производится. Через SD карту запускаем на печать. На LCD экране принтера скорость печати 100%, фейдером её можно до 999% довести т.е. увеличить с 35мм/сек до 35*9.99 до 350мм/сек. Смотрим максимальную паспортную скорость принтера, в текущем случае производитель заявляет 300мм/сек. Т.е. при скорости печати 35мм/сек могу произвести аппаратное увеличение скорости печати через меню принтера до 850%.
Далее, у нас есть 2 настраиваемых параметра, аппаратная скорость печати от 100%(35мм/сек) до 850%, это 35-300мм/сек и ток X Y Z драйверов. Как обратную связь контролируем пропуск шагов и вибрации эффектора при движении хотэнда по окружности и/или прямой.
Проверим пропуски шагов, настраиваем токи X Y Z в 1.2A (для 1.7А двигателей), и плавно увеличиваем скорость печати шагами по 50%. Для DRV8825 ток 1.2А заметные пропуски начинаются на 850%. Проявляются в виде щелчков и опускании плоскости печати по вертикальной оси вниз, во время щелчков экструдер понемногу приближается к столу, причём наблюдается перекос плоскости печати. Ниже 3 демонстрационных видео демонстрирующих пропуски шагов:
DRV8825 ток 1.2А скорость 300мм/сек
DRV8825 ток 1.6A скорость 300мм/сек
A4988 ток 1.2A скорость 300мм/сек
Реальная комфортная скорость для точной печати у этого принтера 25-40мм/сек, после описанных изменений. Можно печатать до 100мм/cек. Драйвер DRV8825 ток 0.8А, дробление 1/16. Максимальная скорость в районе 200мм/сек, с DRV8825, если выше, то наблюдаются пропуски.
Для DRV8825 ток 0.5А, 1/16, пропуски наблюдаются на 300% или 105мм/сек. В управляющем файле задана скорость 35мм/сек.
Тестируемый принтер, вопреки маркетинговым заявлением продавца, не будет работать со скоростью печати 300мм/сек, нужно пробовать увеличить напряжение питания шаговых двигателей.
Наблюдается некая вилка скоростей печати, при которых эффектор не вибрирует, резонансные явления минимальны. Он вообще не вибрирует, до скоростей 40-60мм/сек, далее начинает немного вибрировать в центральной части стола. Потом вибрации усиливаются и затем на 250мм/сек и более, снижаются. Увеличение напряжения питания шаговых двигателей должно увеличить скорость их работы, и соответственно скорость печати, что весьма актуально, в том числе изменить шумность работыи повлиять на резонансные явления.
На скоростях, в районе 300мм/сек и более, для тестируемого принтера, вибрации эффектора слабы. Чем плохи вибрации эффектора или резонанс? Качество печати не проверял, но помимо шума резонанс убивает механику принтера, существенно снижает момент. В любом случае 40-60мм/сек качественной печати это очень хорошо. Резонанс существенно снижает момент двигателя, дробление шага также снижает момент, но если, например при дроблении 1/8 будет наблюдаться резонанс, а при 1/16 его не будет, то можно сказать что при увеличении дробления до 1/16 момент увеличился т.к. исчез резонанс. Паразитный резонанс может снижать момент в большей степени, чем дробление.
Пока закончилось так: драйвер DRV8825, ток X Y Z =1.3A, дробление 1/16. Питание шаговых двигателей оставлено прежним +12V. На глаз — увеличение тока драйверов X Y Z приводит к снижению вибраций эффектора. Возможно, ток будет установлен в 0.6A и напряжение питания +24VDC от линейного источника питания. Об этом в других статьях
Как проверить работоспособность шагового двигателя wff
Шаговый электродвигатель
— это вращающийся электродвигатель с дискретными угловыми перемещениями ротора, осуществляемыми за счет импульсов сигнала управления [1].
Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
Тестер-драйвер шагового двигателя
Когда я начал собирать свой первый самосборный 3D принтер (вариация на тему HyberCube Evolution, но об этом позже), то уже на одном из первых этапов возникла необходимость покрутить шаговые двигатели оси Z, а плата управления еще не пришла. Да и честно сказать, слишком много работы для такой простой задачи. Ведь надо сконфигурировать и залить прошивку, подключить питание, дисплей, двайверы, все это временно подвесить на соплях, сильно повышая шансы на случайное замыкание и досрочный выход из строя самой дорогой запчасти. Да и ждать не охота, вся работа встала из-за того, что мне нечем крутануть туда-сюда один или два движка для подстройки расположения механических компонентов. Руками? Не так быстро, а главное — не точно. Ну как вы крутанете одновременно два мотора, скажем на 100 оборотов (каждый оборот — 200 шагов), не ошибившись ни на шаг, т. к. это вызовет перекос? И вообще, хочется «погонять» ось приближенно к «боевым условиям», чтобы оно само гудело и ездило. Ровно и быстро. В общем, пришлось что-то выдумывать.
Так как у меня уже была горсть дешевейших и надежнейших драйверов А4988, которые суют во все китайские 3D принтеры по-умолчанию, задачу я решил «в лоб». Что там нужно, чтобы этот драйвер крутил вот такой биполярный шаговик (у меня стандартные NEMA 17 48мм)? Всего лишь указать драйверу направление (вывод DIR) логическим уровнем и подать импульсы на вывод STEP. Ну и подключить шаговик и питание, естественно. В итоге образовалась вот такая простая схема, оказавшаяся удобной и практичной. Все есть: «крутилка» скорости, тумблер «туда-сюда», тумблер «крутить/стоять». Джамперами JP1…JP3 можно выставить микрошаг в диапазоне от полного шага до 1/16, хотя на практике оказалось достаточно полношагового режима, но лишняя возможность может пригодиться. Итак, схема.

На популярном таймере 555 собран регулируемый генератор импульсов частотой примерно от 80 до 900 Герц (в режиме полного шага мотор крутится в диапазоне от «едва ползет» до «мчится со свистом»). Импульсы через тумблер SW1 попадают на вход STEP драйвера А4988, это режим «крутить». Если тумблер разомкнуть, драйвер перейдет в режим торможения (удерживания) мотора. Чтобы «отпустить» моторы, надо снять питание с драйвера. Тумблер SW2 переключает направление вращения шагового мотора. Резисторы R6 и R7 «подтягивают» соответствующие входы к «земле», на плате этих резисторов почему-то нет, хотя все прочие входы имеют «подтягивающие» к «земле» внутрисхемные резисторы. Вообще номиналы резисторов могут варьироваться в достаточно широких пределах, плюс-минус процентов 30 точно, схема сохраняет работоспособность. Точно так же не критична емкость конденсаторов, в принципе от 10нФ до 1мкФ пойдет любая керамика. Исключение — конденсатор С1, который желательно использовать пленочный. Значение емкости определяет диапазон частот, вместе с переменным резистором Р1. Номиналы С1 и Р1 можно изменять в широких пределах, сохраняя их произведение, как в исходной схеме. Скажем, можно взять емкость С1 0,47мкФ, но переменник Р1 тогда применить 20кОм. Диапазон частот, конечно, несколько сузится, но работать все будет нормально. Стабилизатор 78L05 можно заменить любым подходящим на напряжение 3.3..5В. Входное напряжение не желательно применять менее 12В и более 24В, драйвер выдерживает ток обмоток мотора 1А длительно, превышать это значение не стоит. Кто не в курсе — на драйвере А4988, как на многих других, установлен миниатюрный подстроечный резистор, которым выставляется максимальный ток шагового двигателя. Выбор максимального тока зависит от типа вашего шагового двигателя, сама же процедура многократно описана в сети, повторяться не вижу смысла. Кто не знает — гуглим «A4988 max current».
Таблица для выставления дробления шагов драйвера А4988 джамперами JP1..JP3
Схему собрал на второпях разведенной двусторонней платке размером 75х35мм, где верхний слой фольги играет роль общего провода (GND). Такой тип плат упрощает разводку, да и одностороннего стеклотекстолита под рукой не было. Все «земляные» выводы компонентов паяются прямо на фольгу, без отверстий, на фото видно. Панелька драйвера сделана из двух половинок распиленной панельки под выводную микросхему DIP16, также видно на фото (кликабельно). Плату в формате LAY прилагаю ниже, как и пару фоток, снятых на тапок. Номиналы деталей появляются при наведении на них курсора в программе Sprint Layout.







Микрошаговый режим
Микрошаги это не магия. Существуют специальные драйверы для микрошагового управления. Это позволяет увеличить точность позиционирования, однако достигается за счет значительного крутящего момента. Кроме того, наличие драйвера, обеспечивающего шаг 1/32, не значит, что ваш электродвигатель сможет это реализовать. После определенного порога (1/10 и иногда 1/16) требуются высококачественные драйверы и двигатели. Даже если ваш шаговый электродвигатель и драйвер смогут реализовать микрошаг в 1/32, возможно ли это интегрировать в общую систему управления?
Рассмотрим следующий пример. Линейное перемещение с 10 шагами на дюйм ходового винта напрямую соединенного с типичным шаговым двигателем, имеющим 200 шагов на оборот. Каждый полный шаг электрической машины будет переведен в 0,0005 дюйма линейного движения. Казалось бы, что, якобы, та же система микрошагов 1/32 сможет уменьшить линейный шаг до 0,000015. Но в реальности реализации данной системы практически не возможна, так как упругость и силы трения не позволят преобразовать настолько миниатюрные шаги к линейному движению.
Микрошаговый режим реально полезен при проверке системы с шаговой электрической машиной на резонанс. Это дает определенные возможности для избегания резонанса. Как известно, любая механическая система имеет резонансную частоту. Для шаговых электродвигателей достижение этой частоты, как правило, происходит на определенной скорости, после чего двигатель начнет сильно шуметь. Эти шумы могут привести к «пропусканию шагов», что чревато серьезными последствиями для определенных систем. В некоторых случаях это может привести к слишком большим вибрациям. В случаях с режущими машинами, такими как токарные станки, этот звук можно спутать с рабочим звуком обработки поверхности заготовки. Микрошаговый режим уменьшает расстояние пройденное валом между шагами (на появление шумов тратится меньше энергии).
Наностенд для проверки шаговых моторов и драйверов.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Продолжаю нанообзоры. Сколько всего интересного появилось то на Али.
Стендик для проверки шаговиков и драйверов. Маст хэв для настоящих репрапперов. Хотя за его цену они принтер соберут.
Сравнение сервоприводов и шаговых двигателей
1. Физика процесса
Электрические машины широко применяют на электрических станциях, в промышленности, на транспорте, в авиации, в системах автоматического регулирования и управления, в быту. Электрические машины преобразуют механическую энергию в электрическую и наоборот, электрическую энергию в механическую. Машина, преобразующая механическую энергию в электрическую, называется генератором. Преобразование электрической энергии в механическую осуществляется двигателями.Принцип действия электрических машин основан на использовании законов электромагнитной индукции и электромагнитных сил. Если в магнитном поле полюсов постоянных магнитов или электромагнитов поместить проводник и под действием какой-либо силы F1 перемещать его, то в нем возникает Э.Д.С. равная:
где В — магнитная индукция в месте, где находится проводник,
l — активная длина проводника (та его часть, которая находится в магнитном поле),
v — скорость перемещения проводника в магнитном поле.
Если этот проводник замкнуть на какой-либо приемник энергии, то в замкнутой цепи под действием Э.Д.С. будет протекать ток, совпадающий по направлению с Э.Д.С. в проводнике. В результате взаимодействия тока I в проводнике с магнитным полем полюсов создается электромагнитная сила Fэ, направление которой определяется по правилу левой руки; эта сила будет направлена навстречу силе, перемещающей проводник в магнитном поле. При равенстве сил F1 = Fэ проводник будет перемещаться с постоянной скоростью. Следовательно, в такой простейшей электрической машине механическая энергия, затрачиваемая на перемещение проводника, преобразуется в энергию электрическую, отдаваемую сопротивлению внешнего приемника энергии, т. е. машина работает генератором. Та же простейшая электрическая машина может работать двигателем. Если от постороннего источника электрической энергии через проводник пропустить ток, то в результате взаимодействия тока в проводнике с магнитным полем полюсов создается электромагнитная сила Рэ, под действием которой проводник начнет перемещаться в магнитном поле, преодолевая силу торможения какого-либо механического приемника энергии.
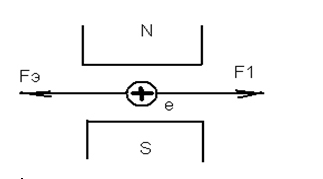 Рисунок 2 — Физика процесса
Рисунок 2 — Физика процесса
Таким образом, рассмотренная машина так же, как и любая электрическая машина, обратима, т. е. может работать как генератором, так и двигателем. Для увеличения Э.Д.С. и электромеханических сил электрические машины снабжаются обмотками, состоящими из большого числа проводов, которые соединяются между собой так, чтобы Э.Д.С. в них имели одинаковое направление и складывались. Э.Д.С. в проводнике будет индуктирована также и в том случае, когда проводник неподвижен, а перемещается магнитное поле полюсов.
2. Асинхронные двигатели
Наиболее распространенные электрические машины. В основном они используются как электродвигатели и являются основными преобразователями электрической энергии в механическую.Асинхронный двигатель имеет статор (неподвижная часть) и ротор (подвижная часть), разделенные воздушным зазором, ротор крепится на подшипниках. Активными частями являются обмотки; все остальные части — конструктивные, обеспечивающие необходимую прочность, жесткость, охлаждение, возможность вращения и т. п. По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора — из электротехнической стали и шихтованным. Фазный ротор используют когда необходимо создать большой пусковой момент. К ротору подводят ток и в результате уже возникает магнитный поток необходимый для создания момента.
На обмотку статора подается напряжение, под действием которого по этим обмоткам протекает ток и создает вращающееся магнитное поле. Магнитное поле воздействует на стержни ротора и по закону магнитной индукции возникает электрический ток т. к. изменяется магнитный поток, проходящий через замкнутый контур ротора. Токи в стержнях ротора создают собственное магнитное поле стержней, которые вступают во взаимодействие с вращающимся магнитным полем статора. В результате на каждый стержень действует сила, которая складываясь по окружности создает вращающийся электромагнитный момент ротора из-за того, что индукционный ток, возникающий в замкнутом контуре ротора, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток. Следовательно и возникает вращение.Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора Э.Д.С. и, в свою очередь, создавать крутящий момент.
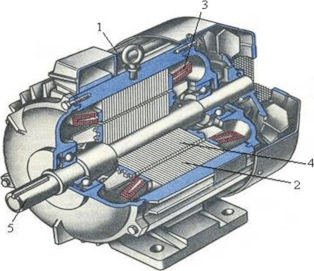 Рисунок 3 — Вид асинхронной машины с короткозамкнутым ротором в разрезе
Рисунок 3 — Вид асинхронной машины с короткозамкнутым ротором в разрезе
На рисунке приведен вид асинхронной машины с короткозамкнутым ротором в разрезе:
2 — сердечник статора,
3 — обмотка статора,
4 — сердечник ротора с короткозамкнутой обмоткой,
3. Синхронные двигатели
Синхронный двигатель не имеет принципиальных конструктивных отличий от асинхронных. На статоре синхронного двигателя помещается трехфазная обмотка, при включении которой в сеть трехфазного переменного тока будет создано вращающееся магнитное поле, число оборотов в минуту которого n = 60f/p, где f — частота напряжения питания привода. На роторе двигателя помещена обмотка возбуждения, включаемая в сеть источника постоянного тока. Либо ротор выполнен из постоянного магнита. Ток возбуждения создает магнитный поток полюсов или в случае с постоянным магнитом, магнитный поток уже создан. Вращающееся магнитное поле, полученное токами обмотки статора, увлекает за собой полюса ротора. При этом ротор может вращаться только с синхронной скоростью, т. е. со скоростью, равной скорости вращения поля статора. Таким образом, скорость синхронного двигателя строго постоянна, если неизменна частота тока питающей сети.
Достоинством синхронных двигателей является меньшая, чем у асинхронных, чувствительность к изменению напряжения питающей сети. У синхронных двигателей вращающий момент пропорционален напряжению сети в первой степени, тогда как у асинхронных — квадрату напряжения. Вращающий момент синхронного двигателя создается в результате взаимодействия магнитного поля статора с магнитным полем полюсов. От напряжения питающей сети зависит только магнитный поток поля статора.
4. Шаговые двигатели
Шаговые двигатели — это электромеханические устройства, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. По сути шаговый двигатель является синхронным, но отличается подходом управления. Рассмотрим самые распространенные.
5. Двигатели с постоянными магнитами
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты. Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением. Такой двигатель имеет величину шага 30°. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48—24 шага на оборот (угол шага 7,5—15°). Двигатели с постоянными магнитами подвержены влиянию обратной Э.Д.С. со стороны ротора, котрая ограничивает максимальную скорость.
6. Гибридные двигатели
Являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3,6…0,9°). Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3,6° двигателей и 8 основных полюсов для 1,8…0,9° двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
где Nph — число эквивалентных полюсов на фазу, равное числу полюсов ротора,
Ph — число фаз,
N — полное количество полюсов для всех фаз вместе.
7. Сервопривод
Сервопривод — общее название привода, синхронного, асинхронного либо любого другого, с отрицательной обратной связью по положению, моменту и др. параметрам, позволяющего точно управлять параметрами движения. Сервопривод – это комплекс технических средств. Состав сервопривода: привод – например, электромотор, датчик обратной связи – например, датчик угла поворота выходного вала редуктора (энкодер), блок питания и управления (он же преобразователь частоты сервоусилитель инвертор servodrive). Мощность двигателей: 0,05…15 кВт. Существует понятие «вентильный двигатель». Это всего лишь названия для двигателя, управление которым осуществляется через «вентили» – ключи, переключатели и т. п. коммутационные элементы. Современными «вентилями» являются IGBT-транзисторы использующиеся в блоках управления приводами. Никакого конструктивного отличия нет. Основным достоинством сервоприводов является наличие обратной связи, благодаря которой такая система может поддерживать точность позиционирования на высоких скоростях и высоких моментах. Также систему отличает низкоинерционность и высокие динамические характеристики, например время переключения от скорости –3 000 об/мин до достижения 3 000 об/мин составляет всего 0,1 с. Современные блоки управления являются высокотехнологическими изделиями со сложной системой управления и могут обеспечить выполнение практически любой задачи.
Характеристики системы сервопривода рассмотрим основываясь на сервоприводах фирмы Delta elc. Серии блока управления ASDA-A и двигателем 400 Вт. Как видно поддержание момента линейное на всем диапазоне скоростей. Это достигается благодаря использованию синхронного двигателя в высококачественном исполнении. Величина шага перемещения определяется разрешающей способностью датчика обратной связи, энкодера, а так же блоком управления. Стандартные сервоприводы могут обеспечить шаг в 0,036° т. е. 1/10 000 от оборота, и это на скоростях до 5 000 об/мин.
Самые современные сервоприводы отрабатывают шаг в 1/2 500 000.
* — Динамическая точность — максимальное отклонение реальной траектории перемещения инструмента от запрограммированной
8. Вывод
Сервопривод и шаговый двигатель не являются конкурентами, а каждый занимает свою определенную нишу. Сравним их на основе рынка станков с ЧПУ. Применение шаговых двигателей полностью оправданно для применения в недорогих станках с ЧПУ (в ценовой категории до 10—12 тыс. USD), предназначенных для обработки дерева, пластиков, ДСП, МДФ, легких металлов и других материалов средней скорости.Применение высококачественных сервоприводов необходимо в высокопроизводительном оборудовании, где главным критерием является производительность. Единственный «недостаток» хорошего сервопривода – это его высокая стоимость. К примеру, станок ATS-760 на шаговых приводах стоит 11 000 $, а эта же модель, но на сервоприводах стоит 17 500 $. Однако возможности получения высокостабильного или точного управления, широкий диапазон регулирования скорости, высокая помехоустойчивость, малые габариты и вес часто являются решающими факторами их применения. Добившись одинаковых качеств от сервопривода и шагового их стоимости станут соизмеримыми при однозначном лидерстве сервопривода.
Клинит шаговый двигатель на фрезерном станке [KingCut X6]
Помогите, пожалуйста, разобраться со следующей проблемой:
Есть фрезерный станок KymkCut X6.
На оси Y стоит движок Moons 23hs3026 [ http://www.moonsindustries.som/products . HB2P_23HS/ ]
К сожалению — точный мануал именно на эту маркировку движка не нашёл. По замерам — обмотки по
Суть проблемы:
— иногда во время фрезерования станок «клинит» и он перестаёт перемещаться по оси Y, при этом двигатель достаточно громко «рычит».
Иногда после выключения-включения станка «отпускает». Иногда нет.
Если при клине отключить станок и попробовать покрутить ось ручками — всё крутиться без проблем в любую сторону.
Внешний осмотр ничего подозрительного не показал.
Подскажите, пожалуйста, с какой стороны начинать щупать.
Помощь в написании контрольных, курсовых и дипломных работ здесь.
Шаговый двигатель
Здравствуйте у меня вопрос по шаговому двигателю, а точнее по программе программа дожна следить.
шаговый двигатель
Привет. Как можно поднять обороты шагового двигателя? Напряжения питания 12В, модель шагового.
ATMega и шаговый двигатель
есть ли какие-нибудь библиотеки для ATMega, для шаговых двигателей надо запустить три движка.
Проседает шаговый двигатель
То есть он вертится.Но без усилия.В чем может быть причина?В обмотке?
Клинит как при обработке, так и при обычном перемещении каретки.
К сожалению, сей глюк появляется нерегулярно и редко. Выявить сложно.
Менять местами X и Y пока не решаюсь, так как при включении станок ставит каретку в «0» и, в случае замены координат, боюсь спалить движки (срабатывания датчиков не будет). А менять местами ещё и концевые датчики очень не хочеться.
А без нагрузки (т.е. с отключенным мотором) можно проследить за работой драйвера?
Или обязательна работа на нагрузку?
Можно ли заменить обмотки двигателя резисторами? Или обязательно нужна индуктивная нагрузка?
И ещё вопрос: на станке раньше кроили алюкобонд и станок был буквально усыпан алюминиевой и пластиковой стружкой. Может ли быть такое, что алюминиевая стружка попала в двигатель и где-то коротит статор?
Так же на разъёме, подключаемом к двигателю, на одином из контактов был чёрный налёт. Может ли эта гадость быть причиной такого заклинивания? (учитывая, что клинит движок достаточно редко)
Руками всё крутиться вполне себе свободно. В том числе после отключения станка при клине.
Почему я и обратился за помощью — сразу грешил на механику, но нет — всё крутиться двигается без чрезмерных усилий. Значит дело либо в двигателе, либо в его драйвере.
Может, кто подскажет ссылку на методику диагностики шаговых движков и их драйверов?
Нашёл вот такую схемку: http://full-chip.net/shemy-na-mykrokont . telya.html
Попробую попросить знакомого помочь собрать/прошить, ибо сам пока ещё с микроконтроллерами не знаком 🙁
Эта проверка вам мало чего даст.
Для начала нужно собрать как можно больше данных, например:
1. Когда клинит: разгон, торможение, постоянная скорость
2. С нагрузкой или без (ну это вроде написали)
3. Не появляется ли перед этим посторонний звук
4. Убедиться в адекватной выдаче сигнала STEP и в том что он доходит до драйвера.
Чтобы проверить двигатель достаточно: проверить совпадение сопротивлений обмоток; убедиться в отсутствии заеданий и цепляний при вращении ручками, убедиться в адекватности нагрева при работе на номинальном токе. Больше там сверхъесьесьвенного ничего быть не должно (ну варианты того, что кто-то умудрился его разнигнитить пока опускаем).
Причины скорее всего до двигателя, либо после. По описанию тут два основных варианта:
1. Мех. резонанс двигателя (обычно проявляется штуки 3 на определенных скоростях вращения, поэтому легко определяется)
2. Выпадение из синхронизма по другим причинам.
По второму пункту причин несколько:
1. Неадекватная подача STEP (пропуск нескольких импульсов либо неравномерные рампы разгона и торможения). От глюков винды и заканчивая плохим контактомв проводах и шлейфах.
2. Проблемы с питанием (драйверов, опторазвязок, шлейфа на движки и т.п. Кратковременные неконтакты могут выбить из синхронизма опять же. )
3. Сбои самого драйвера (его контроллера если есть, либо опять же неконтакты/непропаи)