Вешеневский характеристики двигателей в электроприводе 1967
Введение. Общие сведения о вентильном электроприводе
Лекция 1
Общие сведения о вентильном электроприводе. Классификация.
Введение.
С объектами, приводимыми в движение электрическими машинами, мы постоянно сталкиваемся не только в сфере промышленности и транспорта, но и в бытовой сфере. В нашу жизнь прочно вошли такие устройства с электроприводом, как стиральная машина, вентилятор, лифт, кондиционер, кофемолка, пылесос и т.д. В настоящее время основным средством приведения в движение рабочих машин является электрический двигатель и соответственно основным типом привода служит электрический привод или сокращенно электропривод(ЭП). В области промышленности и на электрифицированном транспорте электродвигатели приводят в движение станки, грузоподъемные механизмы, компрессоры, конвейеры, экскаваторы, вагоны метрополитена, трамвая, троллейбуса и т.д. Этот перечень Вы без труда можете продолжить сами, и он займет не один десяток страниц. Электрические машины, электромеханические преобразователи и электропривод прошли достаточно долгий путь развития и совершенствования.
Первый в истории техники электропривод был создан академиком Б.С. Якоби в Петербурге в 1834-1838 гг. Этот электропривод с машиной постоянного тока, питаемой от гальванических батарей, использовался для приведения в движение катера на реке Неве.
Примерно в 1890 г. выдающийся русский инженер Доливо-Добровольский разработал первые образцы трехфазных машин переменного тока.
Тяговый электропривод на железных дорогах впервые был использован в 1876 г. в Петербурге инженером А.Пироцким, а в 1881 г. в Германии была электрифицирована трамвайная линия.
В 1895 г. в США была осуществлена электрификация пригородной железной дороги. Во всех системах электрификации железных дорог вначале использовались двигатели постоянного тока. Первый опыт использования электрических машин переменного тока для железнодорожного транспорта относится к 1890 г. (Италия). В промышленности на первых этапах развития техники электрического привода использовался преимущественно групповой электропривод, когда исполнительные органы нескольких рабочих машин приводились в движение одним двигателем. При этом применялись сложные трансмиссии и терялось одно из важнейших достоинств электропривода – простота управления потоками энергии и движением исполнительных органов. Развитие техники электропривода характеризуется постепенным приближением места, где электрическая
энергия преобразуется в механическую, к исполнительным органам машин. В настоящее
время, как правило, каждый исполнительный орган рабочей машины приводится в движение отдельным, индивидуальным приводом. Использование индивидуального привода создает условия для автоматизации, позволяет расширить технологические возможности установок, повысить их производительность и качество управления технологическими процессами.
На современном уровне развития техники электропривод выполняется в виде автоматизированного вентильного электропривода(АВЭП).
С помощью АВЭП осуществляются необходимые перемещения в металлорежущих станках, различных перерабатывающих машинах, транспортных средствах, в подъемных установках и т.д. Более половины производимой электроэнергии потребляется АВЭП.
Особенность АВЭП состоит в том, что переработка информации, необходимая для управления потоками энергии, осуществляется автоматически с помощью полупроводниковых систем регулирования. Благодаря применению АВЭП человек освобождается не только от тяжелого физического труда, но с него снимаются также функции соответствующей переработки информации. В результате достигается улучшение условий труда занятых в производственном процессе людей, а также наблюдается значительный рост эффективности процесса производства. Развитие и совершенствование современного АВЭП определяется, прежде всего, прогрессивными решениями в области новых типов электромеханических преобразователей и совершенствованием традиционных электрических машин, развитием силовой преобразовательной техники и электроники, новыми достижениями в теории автоматического управления.
2. Определение понятия «Вентильный электропривод»
Электрический привод представляет собой электромеханичёское устройство, предназначенное для приведения в движение рабочего органа машины и управления ее технологическим процессом. Он состоит из трех частей: электрического двигателя, осуществляющего электромеханическое преобразование энергии, механической части, передающей механическую энергию рабочему органу машины, и системы управления, обеспечивающей оптимальное по тем или иным критериям управление технологическим процессом. Характеристики двигателя и возможности системы управления определяют производительность механизма, точность выполнения технологических операций, динамические нагрузки механического оборудования и ряд других факторов. С другой стороны, нагрузка механической части привода, условия движения ее связанных масс,
точность передач и т. п. оказывают влияние на условия работы двигателя и системы управления, поэтому электрические и механические элементы электропривода образуют единую электромеханическую систему, составные части которой находятся в тесном взаимодействии. Свойства электромеханической системы оказывают решающее влияние на важнейшие показатели рабочей машины и в значительной мере определяют качество и экономическую эффективность технологических процессов. Развитие автоматизированного вентильного электропривода (рисунок 1.) ведет к совершенствованию конструкций машин, к коренным изменениям технологических процессов, к дальнейшему прогрессу во всех отраслях народного хозяйства.
Основные элементы АВЭП показаны на рис. 1.: РМ – рабочая машина, МПУ – механическое передаточное устройство, ЭДУ – электродвигательное устройство, СПУ – силовое преобразовательное устройство, УУ – управляющее устройство, ЗУ – задающее устройство. Дадим более подробную характеристику перечисленных элементов АЭП.
Под рабочими машинами понимают механические устройства, осуществляющие изменение формы, свойств, состояния и положения предметов труда или сбор, переработку и использование информации. Примерами рабочих машин для изменения формы предметов труда могут служить металлообрабатывающие станки, прессы, прокатные станы металлургического производства и др. Изменение свойств и состояния предметов труда осуществляется, например, с помощью установок для закалки, нанесения покрытий, химических установок, компрессоров и др.

Рисунок 1. – Схема автоматизированного электропривода
Для изменения местоположения объектов используются подъемные краны, лифты, эскалаторы, конвейеры, электрифицированные транспортные средства и др. Учитывая столь широкую область применения АВЭП, можно сказать, что он охватывает практически все области современной техники. Электродвигательное устройство является в электроприводе основным элементом, преобразующим механическую энергию в
электрическую. В качестве ЭДУ используются асинхронные двигатели, синхронные двигатели, двигатели постоянного тока независимого, последовательного и смешанного возбуждения, шаговые, вентильные двигатели и др. Механическая энергия от ЭДУ передается к исполнительным органам РМ через механическое передаточное устройство (механический редуктор, цепная передача, ходовая пара «винт-гайка» и т.д.). МПУ позволяет при необходимости преобразовать выходные переменные ЭДУ в требуемые для приведения в движение РМ. Например, преобразовать вращательное движение вала двигателя в линейное перемещение суппорта токарного станка, понизить с помощью редуктора частоту вращения вала двигателя, обеспечить необходимую величину момента или усилия на исполнительном органе РМ.Для создания регулирующего воздействия на ЭДУ используется силовое преобразовательное устройство. На вход СПУ поступают сигналы от управляющего устройства. Желаемые значения регулируемых переменных задаются с помощью задающего устройства. Современные АВЭП при жестких требованиях к качеству регулирования выходных переменных выполняются в виде замкнутых систем автоматического управления. При этом на входы УУ кроме сигналов задания поступают сигналы обратной связи, формируемые датчиками обратных связей Д1, Д2, и т.д. Например сигналы, пропорциональные частоте вращения двигателя ωд, моменту на валу двигателя, моменту Mио и скорости Vио исполнительного органа, и др. В замкнутой системе УУ формирует командные сигналы на СПУ в функции сигналов рассогласования, получаемые в результате сравнения задающих сигналов с сигналами соответствующих датчиков обратных связей. Учитывая изложенное, можно сказать: автоматизированным вентильным электроприводом называется электромеханическая система, предназначенная для приведения в движение исполнительных органов рабочих машин и управления их технологическими процессами, состоящая из задающего, управляющего, силового преобразовательного, электродвигательного и механического передаточного устройств. В тех случаях, когда нет жестких требований к качеству управления движением исполнительных органов рабочей машины, используются более простые приводы, состоящие из силового выключателя и электродвигателя.
Купить С. Н. Вешеневский Характеристики двигателей в электроприводе. Описание и цены..

Взгляните на следующие похожие товары
2136 ₽
Лучшая цена в интернет магазине my-shop.ru
301 ₽
Лучшая цена в интернет магазине Labirint.ru
2267 ₽
Лучшая цена в интернет магазине Labirint.ru
152 ₽
Лучшая цена в интернет магазине Chitai-Gorod.ru
307 ₽
Лучшая цена в интернет магазине my-shop.ru
926 ₽
Лучшая цена в интернет магазине Chitai-Gorod.ru
Описание товара
В книге даются теория и практика расчета механических характеристик двигателей постоянного тока, асинхронных и синхронных в режимах пуска, торможения и регулирования скорости. Значительное место уделено семействам универсальных статических и динамических характеристик, рассчитанных автором для серий отечественных двигателей. Рассматриваются характеристики двигателей при контакторном и тиристорном управлении. Книга предназначена для проектировщиков, наладчиков и эксплуатационников, работающих.. описание на сайте интернет продавца
Характеристики С. Н. Вешеневский Характеристики двигателей в электроприводе
| Обложка | Твердый переплет | Произведение | Характеристики двигателей в электроприводе |
| Глубина упаковки | 210 мм | Вес | 435 г |
| Тираж | 15000 | Ширина упаковки | 140 мм |
| Тип издания | Отдельное издание | Автор | С. Н. Вешеневский |
| Сохранность | Хорошая | Высота упаковки | 30 мм |
Кроме С. Н. Вешеневский Характеристики двигателей в электроприводе, также взгляните на следующие похожие товары
Эта книга — репринт оригинального издания (издательство «Военное издательство Министерства Обороны Союза ССР», 1955 год), созданный на основе электронной копии высокого..
2136 ₽
Лучшая цена в интернет магазине my-shop.ru
Книга содержит информацию по вопросам окисления углеводородов и образования вредных веществ при горении различных топлив в поршневых ДВС; в ней отражены вопросы, связанные с..
301 ₽
Лучшая цена в интернет магазине Labirint.ru
Изложены основы создания высокоэффективных и высокоэкологичных двигателей, проанализированы термодинамические циклы поршневых и комбинированных двигателей, особенности и..
2267 ₽
Лучшая цена в интернет магазине Labirint.ru
В общих чертах тема семи Лучей была впервые представлена вниманию общественности в работе Е.П.Блаватской ТАЙНАЯ ДОКТРИНА: СИНТЕЗ НАУКИ, РЕЛИГИИ И ФИЛОСОФИИ (1888 г.). Позднее она..
152 ₽
Лучшая цена в интернет магазине Chitai-Gorod.ru
Книга посвящена разработке информационных методов исследования физических систем и получению оценок их информационных характеристик. Показано, что информационными характеристиками..
307 ₽
Лучшая цена в интернет магазине my-shop.ru
Книга известного английского специалиста, выдержавшая уже три последовательно совершенствуемых издания. В ней компактно и четко изложены как механические и физико-химические..
Вентильный реактивный электродвигатель



Вентильный реактивный электродвигатель (ВРД) — бесколлекторная синхронная машина, на обмотки статора которой подаются импульсы напряжения управляемой частоты, создающие вращающееся магнитное поле. Также известен под названием вентильно-индукторный двигатель [1] [2] , а устоявшийся англоязычный термин Switched Reluctance Motor (SRM) [3] [4] . Вращающий момент возникает за счёт стремления ротора к положению, при котором магнитный поток статора проходит по оси ротора, изготовленного из магнитомягкого материала, с наименьшим магнитным сопротивлением. Стоит различать данную электрическую машину и вентильно-индукторный двигатель с независимым возбуждением [5] , а также синхронный реактивный электродвигатель [6] (synchronous reluctance motor [7] [8] ), принцип формирования электрического момента и способ управления для которых иной.
Содержание
- 1 Достоинства
- 2 Недостатки
- 3 См. также
- 4 Примечания
- 5 Литература
- 6 Ссылки
Достоинства [ править | править код ]
Вентильные реактивные электродвигатели/генераторы имеют следующие достоинства:
Ротор и статор выполнены в виде пакетов листового магнитомягкого материала. На роторе ВРД отсутствуют обмотки и постоянные магниты. Фазные обмотки находятся только на статоре. Для уменьшения трудоёмкости изготовления катушек, обмотки статора могут изготавливаться отдельно, а затем надеваться на полюсы статора.
Простота обмотки якоря повышает ремонтопригодность ВРД/ВРГ, так как для ремонта достаточно сменить вышедшую из строя катушку.
Отсутствие механического коммутатора
Управление электромеханическим преобразователем электропривода/генератора осуществляется с помощью высокоэффективных силовых полупроводниковых элементов — IGBT или MOSFET (HEXFET) транзисторов, надёжность которых существенно превышает надёжность любых механических деталей, например: коллекторов, щёток, подшипников.
Отсутствие постоянных магнитов
ВРД/ВРГ не содержит постоянных магнитов ни на роторе, ни на статоре, при этом он успешно конкурирует по характеристикам с вентильными электрическими двигателями с постоянными магнитами (ВЭДПМ). В среднем, при одинаковых электрических и весогабаритных характеристиках ВРД/ВРГ имеет в 4 раза меньшую стоимость, значительно большую надёжность, более широкий диапазон частот вращения, более широкий диапазон рабочих температур. Конструктивно, по сравнению с ВЭДПМ, ВРД/ВРГ не имеет ограничения по мощности (практически, мощность ВЭДПМ ограничивается пределом около 20-40 кВТ). ВЭДПМ требуют защиты от металлической пыли, боятся перегрева и сильных электромагнитных полей, в случае короткого замыкания обмотки превращаются в самовозгорающуюся систему. Вентильные реактивные электродвигатели/генераторы свободны от всех этих недостатков.
Малое количество меди
На изготовление ВРД/ВРГ требуется в среднем в 2-3 раза меньше меди, чем для коллекторного электродвигателя такой же мощности, и в 1,3 раза меньше меди, чем для асинхронного электродвигателя.
Tепловыделение происходит в основном только на статоре, при этом легко обеспечивается герметичная конструкция, воздушное или водяное охлаждение
В рабочем режиме не требуется охлаждение ротора. Для охлаждения ВРД/ВРГ достаточно использовать наружную поверхность статора.
Высокие массогабаритные характеристики
В большинстве случаев ВРД/ВРГ может быть выполнен с полым ротором. Толщина спинки ротора при этом должна быть не менее половины ширины полюса. Подбором количества полюсов статора и ротора могут быть оптимизированы массогабаритные характеристики электродвигателя/генератора, его мощность при заданном моменте и диапазоне частоты вращения.
Простота конструкции ВРД/ВРГ снижает трудоёмкость его изготовления. В сущности, его можно изготовить даже на не специализирующемся в области электромашиностроения промышленном предприятии. Для серийного производства ВРД/ВРГ требуется обычное механическое оборудование — штампы для изготовления шихтованных сердечников статора и ротора, токарные и фрезерные станки для обработки валов и корпусных деталей. Трудоёмкие и сложные в технологическом отношении операции, например изготовление коллектора и щёток коллекторного электродвигателя или заливка клетки ротора асинхронного двигателя, здесь отсутствуют. По предварительным оценкам трудоёмкость изготовления ЭМП вентильного реактивного электродвигателя составляет на 70 % меньше трудоёмкости изготовления коллекторного и на 40 % меньше трудоёмкости изготовления асинхронного электродвигателя.
Простота обмотки статора и отсутствие обмотки и магнитов на роторе обеспечивает ВРД/ВРГ высокую гибкость компоновки. Конструкция электродвигателя/генератора может быть плоской, вытянутой, обращённой, секторной, линейной. Для выпуска целого типоряда электродвигателей/генераторов с различной мощностью можно использовать один и тот же комплект штампов для вырубки ротора и статора, поскольку для увеличения мощности достаточно увеличить соответственно длину набора ротора и статора. Не составляет труда изготовление машины с расположением статора как снаружи ротора, так и наоборот, а также встраивание электроники в корпус машины. Изменение коэффициента электромагнитной редукции позволяет создавать машины для облегчённых и, напротив, тяжёлых условий работы, включая моментные двигатели. Для привода некоторых рабочих машин выгоднее иметь линейные электродвигатели с возвратно-поступательным перемещением зубцового штока (аналога ротора). В ряде случаев может быть использована давно известная, но неэффективная в случае асинхронного электродвигателя конструкция дугостаторной машины, статор которой охватывает доступную для размещения дугу окружности ротора, в качестве которого может использоваться вал с зубчатым колесом.
Простота конструкции обеспечивает ВРД/ВРГ более высокую безотказность, чем безотказность других типов электрических машин. Конструктивная и электрическая независимость фазных обмоток обеспечивает работоспособность ВРД даже в случае полного замыкания полюсной катушки одной из фаз. ВРГ остаётся работоспособным даже после выхода из строя одной или двух фаз.
Широкий диапазон частот вращения (от единиц до сотен тысяч об/мин)
Электромагнитная редукция позволяет создавать малогабаритные «моментные» электродвигатели для приводов роботов, манипуляторов и других низкооборотных механизмов или низкооборотные высокоэффективные генераторы для ветровых или волновых электростанций. В то же время частота вращения быстроходных ВРД/ВРГ может превышать 100000 об/мин.
Высокий КПД в широком диапазоне частот вращения
Практически достижимый КПД вентильного реактивного электродвигателя/генератора мощностью 1 КВт может доходить до 90 % в диапазоне 5-10-кратной перестройки частоты вращения. КПД более мощных электрических машин может достигать 95-98 %.
ВРД часто путают с синхронным реактивным электродвигателем (СРД), обмотки якоря которого питаются синусоидально изменяющимися напряжениями без обратной связи по положению ротора. СРД имеет низкий КПД, который не превышает 50 % для маломощных электродвигателей и до 70 % для мощных электрических машин.
Импульсный характер питания ЭМП обеспечивает удобную стыковку с современной цифровой электроникой
Поскольку ВРД/ВРГ питается (возбуждается) однополярными импульсами, для управления ЭМП требуется простой электронный коммутатор. Управляя скважностью импульсов силовых транзисторов электронного коммутатора можно плавно изменять форму импульсов тока фазных обмоток электродвигателя или генератора.
Электронное управление электрическими и механическими характеристиками, режимом работы
Естественная механическая характеристика ВРД/ВРГ определяется реактивным принципом действия электрической машины и близка к гиперболической форме. Основное свойство такой характеристики — постоянство мощности на валу машины — оказывается чрезвычайно полезным для электроприводов с ограниченной мощностью источника, так как при этом легко реализуется условие его неперегружаемости. Применение замкнутой системы управления с обратными связями по скорости и нагрузке позволяет получить механические характеристики любой заданной формы, включая абсолютно жёсткие (астатические), и не ведёт к какому либо усложнению системы управления, так как её процессор обладает большой избыточностью по числу входов и выходов, быстродействию и памяти. Фактически поле доступных механических характеристик непрерывным образом покрывает все четыре квадранта плоскости момент-скорость в пределах области ограничений конкретного электропривода.
Низкая стоимость электромеханического преобразователя
Стоимость ВРД оказывается самой низкой из всех известных конструкций электрических машин. Дорогостоящим в рассматриваемой системе электропривода можно считать электронный преобразователь, который является обязательным элементом всех современных регулируемых электроприводов. Однако, цены на изделия силовой электроники по мере развития масштабов производства имеют устойчивую тенденцию к снижению. Исключение из состава ВРД/ВРГ коммутационных аппаратов, для изготовления которых необходима непрерывно дорожающая медь, также способствует уменьшению стоимости.
Наконец, экономическая эффективность ВРД повышается также в результате существенно меньшего расхода электроэнергии, обусловленного высоким КПД электродвигателя и применением наиболее экономичных стратегий управления в динамических режимах работы.
Недостатки [ править | править код ]
Вентильные реактивные электродвигатели/генераторы имеют следующие недостатки [9] :
низкий коэффициент мощности
Он обусловлен значительной величиной намагничивающей составляющей тока статора.
низкий КПД при небольших мощностях
В реактивных двигателях мощностью в несколько десятков Вт КПД составляет 30-40 %, а в двигателях мощностью до 10 Вт — не превышает 10 %.
по габаритам реактивные двигатели больше синхронных и асинхронных двигателей
Это объясняется низким КПД, малым cos ( φ ) 
Вентильный двигатель
Машины постоянного тока, как правило, имеют более высокие технико-экономические показатели (линейность характеристик, высокий КПД, малые габариты и пр.), чем машины переменного тока. Существенный недостаток — наличие щеточного аппарата, который снижает надежность, увеличивает момент инерции, создает радиопомехи, взрывоопасность и т.д. Поэтому, естественно, актуальна задача создания бесконтактного (бесколлекторного) двигателя постоянного тока.
Решение этой задачи оказалось возможным с появлением полупроводниковых приборов. В бесконтактном двигателе постоянного тока, именуемом вентильным двигателем постоянного тока , щеточный аппарат заменен полупроводниковым коммутатором, якорь неподвижен, ротор представляет собой постоянный магнит.
Принцип работы вентильного двигателя
 Под вентильным двигателем понимают систему регулируемого электропривода, состоящую из электродвигателя переменного тока, конструктивно подобного синхронной машине, вентильного преобразователя и устройств управления, обеспечивающих коммутацию цепей обмоток электродвигателя в зависимости от положения ротора двигателя. В этом смысле вентильный двигатель подобен двигателю постоянного тока, в котором посредством коллекторного коммутатора подключается тот виток обмотки якоря, который находится под полюсами возбуждения.
Под вентильным двигателем понимают систему регулируемого электропривода, состоящую из электродвигателя переменного тока, конструктивно подобного синхронной машине, вентильного преобразователя и устройств управления, обеспечивающих коммутацию цепей обмоток электродвигателя в зависимости от положения ротора двигателя. В этом смысле вентильный двигатель подобен двигателю постоянного тока, в котором посредством коллекторного коммутатора подключается тот виток обмотки якоря, который находится под полюсами возбуждения.
Вентильный двигатель постоянного тока представляет собой сложное электромеханическое устройство, в котором сочетаются простейшая электрическая машина и электронная система управления.
Двигателям постоянного тока присущи серьезные недостатки, обусловленные, главным образом, наличием щеточно-коллекторного аппарата:
1. Недостаточная надежность коллекторного аппарата, необходимость его периодического обслуживания.
2. Ограниченные величины напряжения на якоре и, следовательно, мощности двигателей постоянного тока, что ограничивает их применение для высокоскоростных приводов большой мощности.
3. Ограниченная перегрузочная способность двигателей постоянного тока, ограничение темпа изменения тока якоря, что существенно для высокодинамичных электроприводов.
В вентильном двигателе указанные недостатки не проявляются, поскольку здесь щеточно-коллекторный коммутатор заменен бесконтактным коммутатором, выполненным на тиристорах (для приводов большой мощности) или на транзисторах (для приводов мощностью до 200кВт). Исходя из этого, вентильный двигатель, который конструктивно выполняется на базе синхронной машины, часто называют бесконтактным двигателем постоянного тока.
По управляемости вентильный двигатель также подобен двигателю постоянного тока — его скорость регулируется изменением величины подводимого постоянного напряжения. Благодаря своим хорошим регулировочным качествам вентильные двигатели получили широкое применение для привода различных роботов, металлорежущих станков, промышленных машин и механизмов.
Электропривод по системе транзисторный коммутатор-вентильный двигатель с постоянными магнитами
Вентильный двигатель рассматриваемого типа выполнен на базе трехфазной синхронной машины с постоянными магнитами на роторе. Трехфазные обмотки статора питаются постоянным током, подаваемым поочередно в две последовательно соединенные фазные обмотки. Переключение обмоток производится транзисторным коммутатором, выполненным по трехфазной мостовой схеме. Транзисторные ключи открываются и закрываются в зависимости от положения ротора двигателя. Схема вентильного двигателя представлена на рис.1.
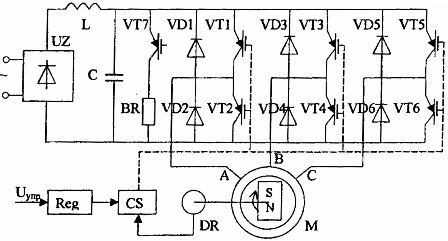
Рис.1. Схема вентильного двигателя с транзисторным коммутатором
Момент, создаваемый двигателем, определяется взаимодействием двух потоков:
• статора, создаваемого током в обмотках статора,
• ротора, создаваемого высокоэнергетическими постоянными магнитами (на основе сплавов самарий-кобальт и других).
где: θ — пространственный угол между векторами потоков статора и ротора; рп — число пар полюсов.
Магнитный поток статора стремится повернуть ротор с постоянными магнитами, так, чтобы поток ротора совпал по направлению с потоком статора (вспомним магнитную стрелку, компаса).
Наибольший момент, создаваемый на валу ротора, будет при угле между векторами потоков равным π/2 и будет уменьшаться до нуля по мере сближения векторов потоков. Эта зависимость показана на рис.2.
Рассмотрим пространственную диаграмму векторов потоков, соответствующую двигательному режиму (при числе пар полюсов pn=1). Предположим, что в данный момент включены транзисторы VT3 и VT2, (см. схему рис.1). Тогда ток проходит через обмотку фазы В и в обратном направлении через обмотку фазы А. Результирующий вектор м.д.с. статора будет занимать в пространстве положение F3 (см.рис.3).
Если ротор занимает в этот момент положение, показанное на рис.4., то двигатель будет развивать в соответствии с 1 максимальный момент, под действием которого ротор будет поворачиваться по часовой стрелке. По мере уменьшения угла θ момент будет уменьшаться. Когда ротор повернется на 30° необходимо в соответствии с графиком на рис.2. переключить ток в фазах двигателя, так, чтобы результирующий вектор м.д.с. статора занял положение F4 (см. рис.3). Для этого нужно отключить транзистор VT3 и включить транзистор VT5.
Переключение фаз выполняет транзисторный коммутатор VT1-VT6, управляемый от датчика положения ротора DR; при этом угол θ поддерживается в пределах 90°±30°, что соответствует максимальному значению момента с наименьшими пульсациями. При рn=1 за один оборот ротора должно быть произведено шесть переключений, благодаря которым м.д.с. статора совершит полный оборот (см. рис.3). При числе пар полюсов больше единицы поворот вектора м.д.с. статора, а, следовательно, и ротора, составит 360/рn градусов.
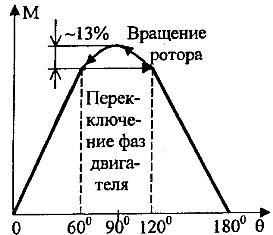
Рис.2. Зависимость момента двигателя от угла между векторами потоков статора и ротора (при рn=1)
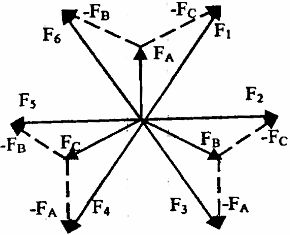
Рис.3. Пространственная диаграмма м.д.с. статора при переключении фаз вентильного двигателя
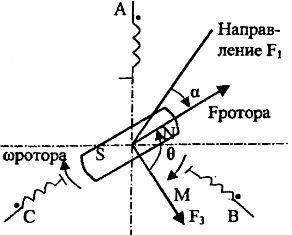
Рис.4. Пространственная диаграмма потоков в двигательном режиме
Регулирование величины момента производится изменением величины м.д.с. статора, т.е. изменением средней величины тока в обмотках статора

где: R1 — сопротивление обмотки статора.
Поскольку поток двигателя постоянен, то э.д.с. Ея, наводимая в двух последовательно включенных обмотках статора будет пропорциональна скорости ротора. Уравнение электрического равновесия для цепей статора будет

При отключении ключей ток в обмотках статора мгновенно не исчезает, а замыкается через обратные диоды и фильтровый конденсатор С.
Следовательно, регулируя напряжение питания двигателя U1, можно регулировать величину тока статора и момента двигателя

Нетрудно заметить, что полученные выражения подобны аналогичным выражениям для двигателя постоянного тока, вследствие чего механические характеристики вентильного двигателя в данной схеме подобны характеристикам двигателя постоянного тока независимого возбуждения при Ф=const.
Изменение напряжения питания вентильного двигателя в рассматриваемой схеме производится методом широтно-импульсного регулирования. Изменяя скважность импульсов транзисторов VT1-VT6 в периоды их включенного состояния, можно регулировать среднюю величину напряжения, подаваемого на обмотки статора двигателя.
Для осуществления режима торможения алгоритм работы транзисторного коммутатора должен быть изменен таким образом, чтобы вектор м.д.с. статора отставал от вектора потока ротора. Тогда момент двигателя станет отрицательным. Поскольку на входе преобразователя установлен неуправляемый выпрямитель, то рекуперация энергии торможения в данной схеме невозможна.
При торможении происходит подзаряд конденсатора фильтра С. Ограничение напряжения на конденсаторах осуществляется путем подключения разрядного сопротивления через транзистор VT7. Таким образом, энергия торможения рассеивается в разрядном сопротивлении.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети: