В каких принтерах используются шаговые двигатели
Как работает шаговый двигатель
Узнайте все преимущества шаговых двигателей, а также достоинства и недостатки выбора этого типа двигателей для вашего проекта.
Если вы работаете над проектом, в котором есть движущаяся часть, вы, вероятно, будете искать двигатель, чтобы сделать это движение возможным. В этой серии статей мы рассматриваем наиболее популярные типы двигателей, которые используют разработчики. Пока мы рассмотрели:
Чтобы узнать, для каких проектов лучше всего подходят шаговые двигатели, ознакомьтесь с обзором:
Обзор шаговых двигателей
В мире разработчиков шаговые двигатели широко распространены в технологии 3D печати. Все потребительские 3D принтеры оснащены ими. Шаговые двигатели также широко используются и в робототехнике.
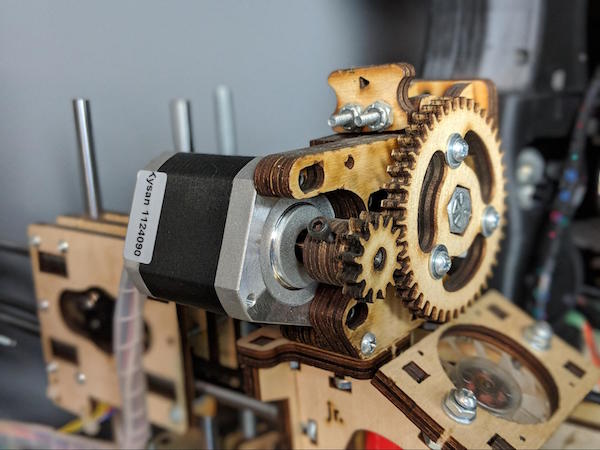 Шаговые двигатели широко используются в робототехнике и 3D принтерах
Шаговые двигатели широко используются в робототехнике и 3D принтерах
Шаговые двигатели часто сравнивают с серводвигателями, поскольку эти оба типа двигателей используются в системах, требующих высокого уровня точности позиционирования.
Однако способы, которыми каждый тип двигателя отслеживает свое положение, сильно отличаются. Как обсуждалось в предыдущей статье, серводвигатель содержит в себе потенциометр, который измеряет абсолютное положение двигателя. Поэтому в любой момент времени сервопривод точно знает, как расположен вал двигателя. Шаговый двигатель не измеряет угол своего вала.
Как работает шаговый двигатель?
Конструкция шагового двигателя похожа на более сложную версию бесколлекторного двигателя. Вы заметите, что многие детали, по сути, одинаковы, но в шаговом двигателе их конструкция значительно сложнее.
 Основные компоненты шагового двигателя
Основные компоненты шагового двигателя
В шаговом двигателе обмотки расположены вокруг внешней части кожуха. Постоянные магниты установлены на валу двигателя. Поскольку эти постоянные магниты достаточно тяжелые, шариковый подшипник с обеих сторон вала двигателя помогает стабилизировать двигатель.
Шаговые двигатели в теории работают аналогично бесколлекторным двигателям. Для создания магнитного поля обмотки возбуждаются и, воздействуя на постоянные магниты, заставляют вал двигателя двигаться.
Ребра на постоянных магнитах соответствуют похожим ребрам на обмотках на корпусе двигателя. Вместо непрерывного вращения шаговые двигатели перемещаются между этими ребрами дискретными шагами.
Различие с бесколлекторным двигателем заключается в том, что вместо того, чтобы каждый раз, когда обмотки переключают полярность, поворачиваться примерно на 30% от окружности, шаговый двигатель поворачивается очень немного, обычно всего на 1,8 градуса. Каждый из этих крошечных поворотов называется шагом. Контроллеры могут также управлять мощностью, подаваемой на обмотки, так, что шаговый двигатель может поворачиваться всего на 0,05625 градуса за шаг. Этот вид чрезвычайно точного управления движением позволяет шаговым двигателям достичь очень высокой точности позиционирования.
Достоинства шаговых двигателей
Высокая точность позиционирования
Основная причина существования шаговых двигателей заключается в том, что система управления движением обеспечивает высокую точность отслеживания положения.
Высокий крутящий момент на низких скоростях
Шаговые двигатели обеспечивают значительный крутящий момент на низких скоростях.
 Оценка характеристик шаговых двигателей
Оценка характеристик шаговых двигателей
Недостатки шаговых двигателей
Низкая максимальная скорость
Поскольку шаговые двигатели перемещаются определенными шагами, у них низкая максимальная скорость вращения.
Низкий крутящий момент на высоких скоростях
На более высоких скоростях шаговые двигатели теряют значительный крутящий момент, обеспечивая лишь около 20% от своего крутящего момента на более низких скоростях.
Опыт изучения Arduino. Подключение шагового двигателя. Часть программная и наладочная.

В прошлой части своего повествования о подключении ШД к ардуино я остановился на том, что собрал на макетной плате стабилизатор напряжения на 5 В, установил плату управления (ПУ) и подготовил выводы ШД. Настройка самой платы заключается в установке тока двигателя и выбора значения микрошага.
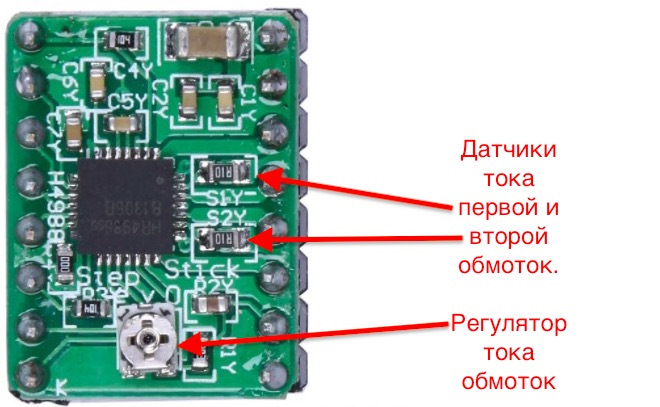
Начнём с тока двигателя. На ПУ надо подать только питание логической части, т.е. 5 В. Плюс подается на вывод VDD (может быть обозначен VCC, VLOG), минус на GND. ШД и его питание пока не подаю. Сам процесс регулировки сводится к установке Vref.
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два чёрных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
Vref = Current Limit * 8 * (RS)
RS = 0,100
Vref = Current Limit * 8 * 0,100 = Current Limit / 1,25
RS = 0,050
Vref = Current Limit * 8 * 0,050 = Current Limit / 2,5
где
Vref – напряжение на пине, который задаёт ток двигателя.
Current Limit – ток шагового двигателя.
RS — сопротивление резистора — датчика тока.
Измерять Vref проще всего на подвижном выводе подстроечного резистора. Минус мультиметра (в режиме измерения напряжения постоянного тока соединяется с выводом GND, а плюс цепляется за жало отвёрточки, которой кручу подстроечный резистор. Ток своего двигателя я не знал и подобрал опытным путём.
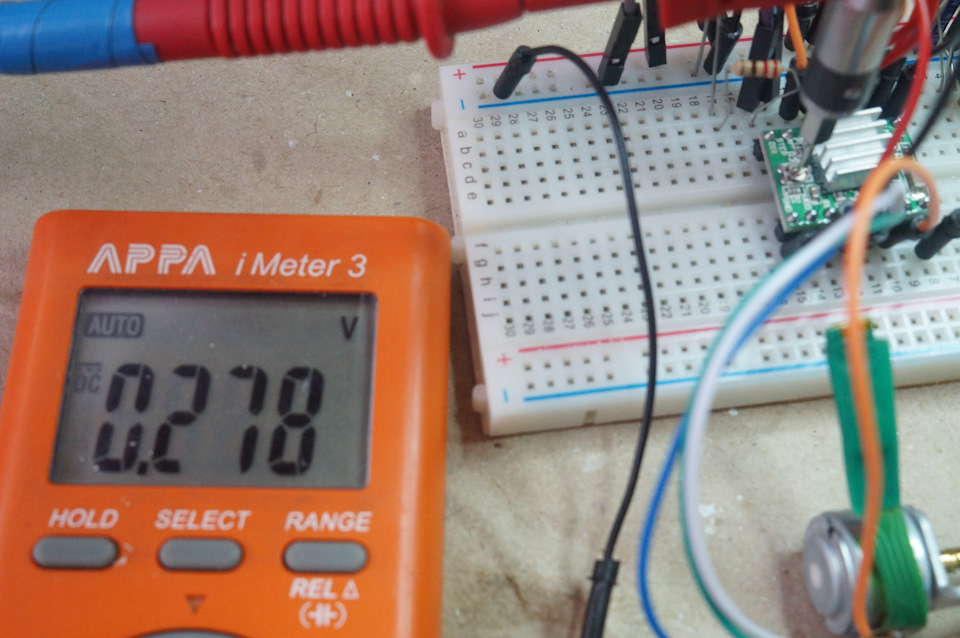
Если пересчитать по формуле, то получу ток:
Vref = Current Limit * 8 * 0,100 = Current Limit / 1,25
отсюда
Current Limit = 1,25 * Vref = 1,25 * 0,28 = 0,35 А или 350 мА
С током разобрался. Теперь микрошаг.

За микрошаг отвечают выводы MS (micro step) MS1, MS2, MS3.
Теперь пару слов о том, что такое микрошаг. Из таблицы видно, что это дробное число. Допустим ШД совершает полный оборот за 200 шагов. Если будет выбран микрошаг 1/4, то полный оборот будет совершаться уже за 800 шагов, а при микрошаге 1/16 — за 3200 шагов. Для чего это нужно? При полном шаге получается больший момент, меньшая точность и больше шумность. Чем мельче шаг, тем выше точность позиционирования, плавнее ход (особенно на малых частотах вращения) и значительно меньше шума при работе. Однако при этом момент на валу двигателя будет меньше. Забегая вперёд, скажу что поигрался с разными значениями, но остановился на 1/16, соединив выводы MS1, MS2, MS3 с выводом VDD.
ПУ настроена — можно подключать двигатель и его питание.
Напомню, что одна из обмоток у меня это синий и зелёный провод, вторая — белый и оранжевый.
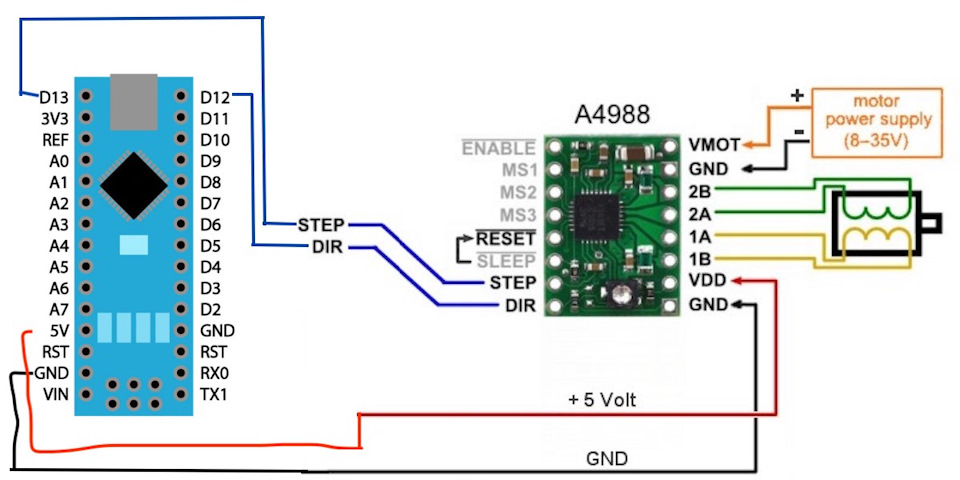
Схематически подключение ШД к ПУ выглядит у меня так:
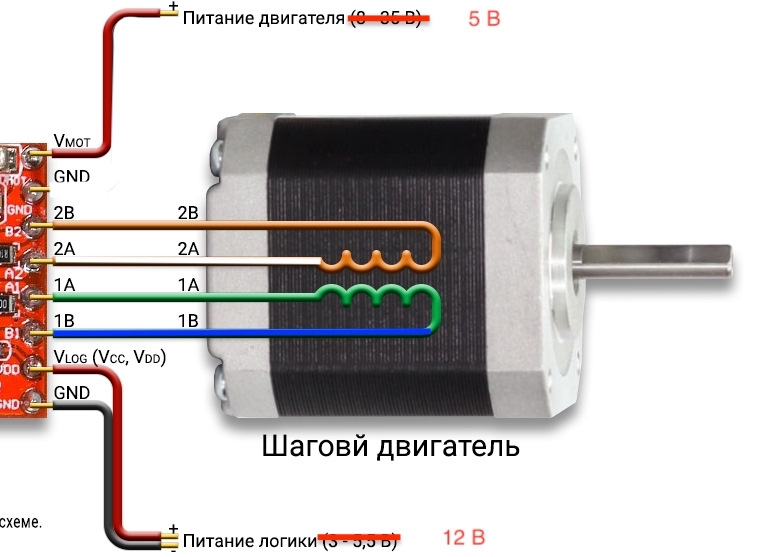
После подачи напряжений питания на плату ШД стал произвольно двигаться. Виной тому наводки на выводах STEP (шаг) и DIR (direction — направление) — эти выводы отвечают за управление вращением ШД.
Если соединить вывод DIR с выводом VDD, ШД будет двигаться в одну сторону, а если с GND, то в другую.
При переходе напряжения от низкого к высокому уровню на выводе STEP ШД совершает 1 микрошаг. Т.е. для вращения двигателя на этот вывод нужно подавать прямоугольные импульсы с низким уровнем около нуля и высоким около 5 В, так называемые TTL-уровни. Генератором таких импульсов у меня будет плата ардуино.
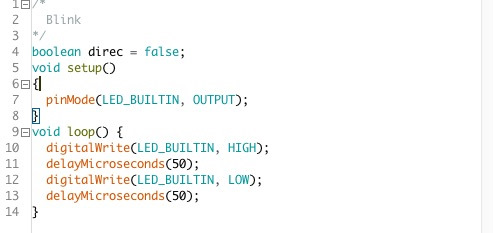
Я загрузил в неё скетч из примеров под названием Blink. В оригинале он формирует на 13 выводе платы (в моём случае Arduino Nano) импульсы с частотой 1/2 Гц (1 с подается высокий уровень, затем 1 с низкий уровень). При такой частоте ШД совершил бы один оборот (при микрошаге 1/16) за 6400 с! Так долго я ждать не хотел))) и стал повышать частоту двигателя. Устойчивой работы мне удалось добиться на частотах вплоть до 10 кГц. Т.е. длительность импульса и паузы у меня составляют по 50 мкс. Операторы delay в скетче пришлось заменить на delayMicroseconds, потому что delay умеет работать только со временами от 1 мс. В итоге скетч стал выглядеть так:
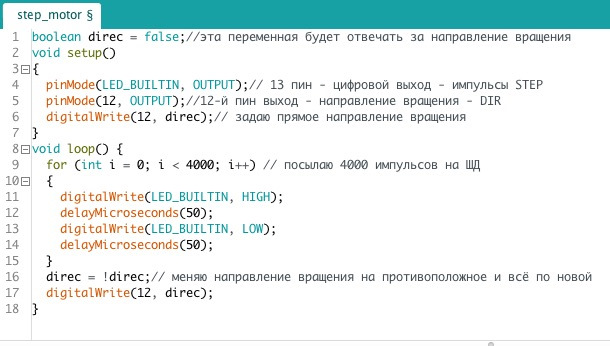
Затем я решил доработать скетч таким образом, чтобы двигатель периодически менял направление вращения. Доработанный скетч выглядит так:
По подключению Arduino.
Пробный запуск показал полную работоспособность схемы. Двигатель не перегревается и шаги не пропускает. Цель достигнута.
Для тех, кто осилил весь материал, видео устройства в работе.
Шаговый мотор
можно использовать шаговый двигатель от матричного принтера, они достаточно мощные и стабильные SilverShadow, 30 Дек. 10, 14:58
Шаговый движек со всех сторон хорош, но требует достаточно сложной схемы управления.
Это был бы идеальный вариан, если бы не сложность схемы управления.
Kotische, 30 Дек. 10, 17:13
Отличная идея .
Просто гениальная .
Никакой сложной схемы управления там нет !
Если взять шаговый двигатель с подключением обмоток по схеме как на рисунке, то для управления достаточно 4
транзистора в нижнем ключе.
Большинство шаговых двигателей, работают по такой схеме (принтеры).
Сопротивление обмоток шагового двигателя в основном расчитано на 5 или 12 вольт.
Берем в нижнем ключе транзисторы серии IRL, они управляются 5-ю вольтами, прямо с микроконтроллера без драйверов.
http://www.electroprivod.ru/fl57st_h.htm
А вот наша схема
http://www.rlocman.ru/shem/schematics.html?di=33475
http://www.joyta.ru/551-upravlenie-shagovym-dvigatelem/
Надо только написать прогу в МК и оттарировать подачу, и вывести регулироваку на потенциометр !
Попробую за праздники соорудить опытный образец с шаговым двигателем.
Посл. ред. 31 Дек. 10, 12:21 от MMaster
НАсчет шаговиков я разговаривал с В_Б неделю назад.
Но он мне сказал, что транзисторов нужно восемь, и схема управления очень сложна. Поэтому я эту идею бросил, хотя движок приличный (шаговик, я имею ввиду) у нас стоит дешевле грязи — 400 рублей)))
Погоди радоваться. В_Б более внятно, чем я, распишет тебе подводные камни — тогда и оценишь задачу.
Если получится — будет просто здорово.
П.С. Вроде должны быть специализированные микросхемы, сразу с силовыми ключами, для управления шаговиками. Может, в этом направлении помыслить, граждане?
НАсчет шаговиков я разговаривал с В_Б неделю назад.
Но он мне сказал, что транзисторов нужно восемь, и схема управления очень сложна. Поэтому я эту идею бросил, хотя движок приличный (шаговик, я имею ввиду) у нас стоит дешевле грязи — 400 рублей)))
Погоди радоваться. В_Б более внятно, чем я, распишет тебе подводные камни — тогда и оценишь задачу.
Если получится — будет просто здорово.
П.С. Вроде должны быть специализированные микросхемы, сразу с силовыми ключами, для управления шаговиками. Может, в этом направлении помыслить, граждане?
игорь223, 31 Дек. 10, 12:42
8 транзисторов надо, если шаговый двигатель биполярный с двумя обмотками без средней точки.
Схему которую я нарисовал, реально рабочая, я уже по такой схеме запускал ШД.
Униполярные движки со средней точкой, поэтому и появились, чтоб упростить управление.
Специализированные микросхемы есть, но они рулят при промышленных маштабах выпуска.
В нашем случае на рассыпухе будет дешевле и проще, особенно на этапе отладки.
У меня даже печатные платы есть под похожую схему (управление бесколлекторником).
Посл. ред. 31 Дек. 10, 12:51 от MMaster
Специализированные микросхемы есть, но они рулят при промышленных маштабах выпуска. MMaster, 31 Дек. 10, 12:44
Масштабы выпуска тут не при чем!
Спец микросхемы делают следующие вещи:
1. Все ключи (транзисторы) находятся в одном корпусе.
2. Управление ключами — импульсное (ШИМ)
3. Обратная связь по датчику тока меняет парметры ШИМа.
4. Примитивная логика — не дает открыться двум ключам одновременно (защита от короткого замыкания через ключи)
5. Возможность деления шагов — работа с микрошагом
1. — это чисто удобство, уменьшение количества внешней обвязки.
2. — это потому что для нормальной работы движка, его обмотки требуют управления ТОКОМ, а не напряжением.
Это деалется, вопервых для повышения быстродействия, вовторых для уменьшения нагрева обмоток.
При управлении напряжением, движек будет сильно греться, но работать будет очень медленно и не будет развивать тягового усилия.
3. — это часть пункта 2.
4. — чисто «защита от дурака», и повышение удобства — у драйвера обычно 2 входа, направление вращения и тактовый.
5. — повышается угловое разрешение, это если нужны очень маленькие шаги или очень плавное вращение.
В наших целях это всё действительно не особо актуально.
В нашем случае на рассыпухе будет дешевле и проще, особенно на этапе отладки. MMaster, 31 Дек. 10, 12:44
Да ты шо. 😮
У спец микросхемы всей обвязки мотор да токозадаящий резистор, и управление — два провода, направление и тактовый.
А на рассыпухе делать — зубы вспотеют!
Управление 8 полевиками, каждым в своей фазе, согласитель, всё же несколько не совсем просто. 
А вот наша схема. Надо только написать прогу в МК MMaster, 31 Дек. 10, 11:23
Посл. ред. 31 Дек. 10, 15:33 от Kotische
Kotische, обрати внимание на ссылочку, которую дал olegmak3. Ты, наверное, не углядел, что она управляется постоянным напряжением — т.е. положение (число шагов относительно нулевой позиции) шаговика задается уровнем управляющего напряжения. Отличная схема и самый правильный вариант для привода всяких кранов и т.п.
Для привода движка подачи браги прогу нужно немного поменять так, чтобы от уровня управляющего напряжения зависело не положение шаговика, а скорость его вращения. Но там вроде должны были быть исходники.
Правда нужен шаговик с редуктором. olegmak3у хорошо, у него-то есть готовые.
Посл. ред. 31 Дек. 10, 15:56 от Rudy
Правда нужен шаговик с редуктором. olegmak3у хорошо, у него-то есть готовые.
Rudy, 31 Дек. 10, 15:48
собирал на ULN2003 мощность хватает только головки таскать garry1964, 31 Дек. 10, 16:26
Масштабы выпуска тут не при чем!
Спец микросхемы делают следующие вещи:
1. Все ключи (транзисторы) находятся в одном корпусе.
2. Управление ключами — импульсное (ШИМ)
3. Обратная связь по датчику тока меняет парметры ШИМа.
4. Примитивная логика — не дает открыться двум ключам одновременно (защита от короткого замыкания через ключи)
5. Возможность деления шагов — работа с микрошагом
1. — это чисто удобство, уменьшение количества внешней обвязки.
2. — это потому что для нормальной работы движка, его обмотки требуют управления ТОКОМ, а не напряжением.
Это деалется, вопервых для повышения быстродействия, вовторых для уменьшения нагрева обмоток.
При управлении напряжением, движек будет сильно греться, но работать будет очень медленно и не будет развивать тягового усилия.
3. — это часть пункта 2.
4. — чисто «защита от дурака», и повышение удобства — у драйвера обычно 2 входа, направление вращения и тактовый.
5. — повышается угловое разрешение, это если нужны очень маленькие шаги или очень плавное вращение.
В наших целях это всё действительно не особо актуально.
Да ты шо. 
У спец микросхемы всей обвязки мотор да токозадаящий резистор, и управление — два провода, направление и тактовый.
А на рассыпухе делать — зубы вспотеют!
Управление 8 полевиками, каждым в своей фазе, согласитель, всё же несколько не совсем просто.
Да так сделать можно, и ДЛЯ НАШИХ ЦЕЛЕЙ это довольно таки неплохой вариант.
Фишка только в том, что ключи будут создавать нехилые помехи,
процессора имеют обыкновение от помех «виснуть»,
а если схема «зависнет» с открытым ключём, то есть большие шансы что ключь и мотор просто сгорят!
Kotische, 31 Дек. 10, 15:22
Посл. ред. 09 Янв. 11, 10:58 от MMaster
Можно конечно и с контролёром а можно и без.
схема 1 и
схема 2
А ещё можно просто одну катушку включить напрямую к переменному току, а другую через конденсатор (как асинхронный движок)
Для общего развития, любой асинхронный движок может работать как шаговый, если на фазы подовать постоянное напряжение попеременно. (напругу только в 4 раза меньше)
Посл. ред. 27 Февр. 11, 18:02 от Селянин
любой 3х фазный асинхронный движок скороткозамкнутым ротором, соединённый на звезду, может работать как шаговый, если на фазы подовать постоянное напряжение попеременно. (напругу только в 4 раза меньше) Селянин, 27 Февр. 11, 18:00
только пока не знаю зачем KD, 27 Февр. 11, 18:58
Все размещаемые материалы отражают исключительно мнения их авторов и могут не совпадать с мнением Администрации форума ХоумДистиллер.
© 2021 ХоумДистиллер (форум самогонщиков, пивоваров, виноделов, ректификаторов, зерновиков) & Simple Machines LLC
ПК версия
Добро пожаловать на ХоумДистиллер!
Хорошо, что ты зашел к нам, у нас много полезной информации и отличный ПОИСКОВИК в помощь!
Предупреждаем, Форум использует cookie файлы.
Digitrode
цифровая электроника вычислительная техника встраиваемые системы
-
Вычислительная техника
- Микроконтроллеры микропроцессоры
- ПЛИС
- Мини-ПК
- Силовая электроника
- Датчики
- Интерфейсы
-
Теория
- Программирование
- ТАУ и ЦОС
-
Перспективные технологии
- 3D печать
- Робототехника
- Искусственный интеллект
- Криптовалюты
Чтение RSS
Драйвер шагового двигателя: принцип работы, особенности, как выбрать драйвер
Как управлять шаговым двигателем
Стандартный шаговый двигатель с постоянными магнитами имеет две обмотки. Если в системе используется биполярный драйвер, вращение достигается путем подачи определенной последовательности сигналов прямого и обратного тока через две обмотки. Таким образом, для биполярного шагового двигателя требуется H-мост для каждой обмотки. В униполярном приводе используются четыре отдельных драйвера, и они не должны иметь возможность подавать ток в обоих направлениях: центр обмотки представляется как отдельное соединение двигателя, а каждый драйвер обеспечивает ток, протекающий от центра обмотки к концу обмотки. Ток, связанный с каждым драйвером, всегда течет в одном и том же направлении.

На рисунке выше представлен биполярный шаговый двигатель (слева) и униполярный (справа). Направление протекания тока в однополярной системе указывает на то, что центр каждой обмотки подключен к напряжению питания двигателя.
Универсальные микросхемы для управления шаговым двигателем
Первое, что нужно иметь в виду – это то, что микросхемы, предназначенные для основных функций управления двигателем могут использоваться с шаговыми двигателями. Вам не нужна микросхема, которая специально помечена или продается как устройство управления шаговым двигателем. Если вы используете биполярный привод, вам нужно два H-моста на шаговый двигатель; Если вы используете однополярный подход, вам нужно четыре драйвера для одного двигателя, но каждый драйвер может быть одним транзистором, потому что все, что вы делаете, это включаете и выключаете ток, а не меняете его направление.
Примером компонента в категории «универсальная микросхема» является DRV8803 от Texas Instruments. Это устройство описано как «драйверное решение для любого приложения переключения нижнего плеча».

В таком устройстве центр обмоток шагового двигателя подключен к напряжению питания, а к обмоткам подается питание путем включения транзисторов нижнего плеча, чтобы они позволяли току течь от источника питания через половину обмотки, далее через транзистор и на землю.
Подход с использованием универсальной микросхемы удобен, если у вас уже есть опыт работы с подходящим драйвером – вы можете сэкономить несколько долларов, повторно использовав старый компонент, или сэкономить время (и уменьшить вероятность ошибок проектирования), включив известную и проверенную микросхему в вашу цепь управления шаговым двигателем. Но более сложная микросхема может обеспечить расширенную функциональность и упростить задачу проектирования, поэтому предпочтительнее взять шаговый драйвер с дополнительными функциями.
Полнофункциональные драйверы шаговых двигателей
Высокоинтегрированные контроллеры шагового двигателя могут значительно сократить объем проектных работ, связанных с применением более мощных шаговых двигателей. Первая полезная особенность, которая приходит на ум – это автоматическая генерация управляющей последовательности, т.е. способность преобразовывать прямые входные сигналы управления двигателем в требуемые последовательности сигналов. Давайте рассмотрим L6208 от STMicroelectronics, в качестве примера.

Вместо логических входов, которые напрямую контролируют ток, подаваемый на обмотки двигателя, L6208 имеет:
- Вывод, который выбирает между полушагом и полным шагом.
- Вывод, который задает направление вращения.
- Вывод «синхроимпульса», который заставляет внутренний конечный автомат управления двигателем меняться на один шаг при появлении фронта сигнала.
Этот интерфейс гораздо более интуитивно понятен, чем фактические последовательности включения и выключения, которые применяются к транзисторам, подключенным к обмоткам (пример которых приведен ниже).

Это последовательность для управления биполярным шаговым двигателем. «A» и «B» относятся к двум обмоткам, а столбцы «Q» указывают состояние транзисторов, управляющих током обмотки.
Микрошаги
Как следует из названия, функция микрошага заставляет шаговый двигатель выполнять вращение, которое значительно меньше одного шага. Это может быть 1/4 шага или 1/256 шага или где-то посередине. Микрошаг гарантирует точное позиционирование двигателя и обеспечивает более плавное вращение. В некоторых приложениях микрошаг совершенно не нужен. Однако, если ваша система может извлечь выгоду из чрезвычайно точного позиционирования, более плавного вращения или уменьшения механического шума, вам следует рассмотреть возможность использования микросхемы драйвера с возможностью организации микрошагов.
TMC2202 от Trinamic является примером микрошагового контроллера шагового двигателя.

Размер шага может быть всего лишь 1/32 от полного шага, также здесь есть некоторая функциональность интерполяции, которая обеспечивает «полную плавность 256 микрошагов». Эта микросхема также дает вам представление о том, насколько сложным может быть шаговый драйвер – он имеет интерфейс UART для управления и диагностики, специализированный алгоритм драйвера, который улучшает работу в режиме ожидания и низкоскоростную работу, а также различные другие вещи, о которых вы можете прочитать в 81-страничной документации на TMC2202.
Заключение
Если у вас есть микроконтроллер для генерации последовательностей для управления шаговым двигателем и достаточно времени и мотивации для написания надежного кода, вы можете управлять шаговым двигателем с помощью дискретных полевых транзисторов. Тем не менее, почти во всех ситуациях предпочтительнее использовать какую-либо микросхему, и, поскольку на выбор имеется так много устройств и функций, у вас не должно возникнуть особых проблем с поиском компонента, подходящего для вашего приложения.