В каких принтерах хорошие шаговые двигатели
Устройство шагового двигателя: механизм его действия и назначение, где и как применяется
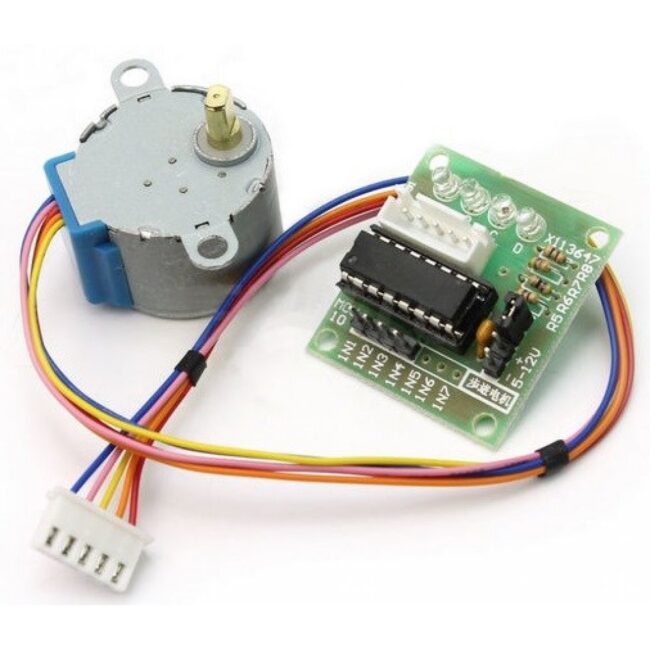
Шаговые двигатели постоянного тока очень часто используют при работе с установками с числовым программным руководством и робототехнике. Главная отличительная особенность такого вида двигателя – это то, как именно действует.
Суть в том, что его работа не непрерывна, а осуществляется пошагово со сменой установленного угла оборота на один шаг. Так образом рабочий элемент имеет конкретный угол поворота в определенный момент, что позволяет контролировать процесс.
Питание такого мотора делимое, совершаемое импульсно. Именно импульсы и обеспечивают поворот вала на какой-то установленный угол.
В основном такие двигатели функционируют совместно с редуктором, который делает установку на валу максимально четкой и с энкодером, который определяет положение вала в данное время. Все эти детали нам нужны для передачи и меняет угол вращения.
Сегодня мы хотим поделиться с вами своими знаниями о данном типе механизмов, о том, как он работает и зачем нужен.
Конструкция шагового двигателя

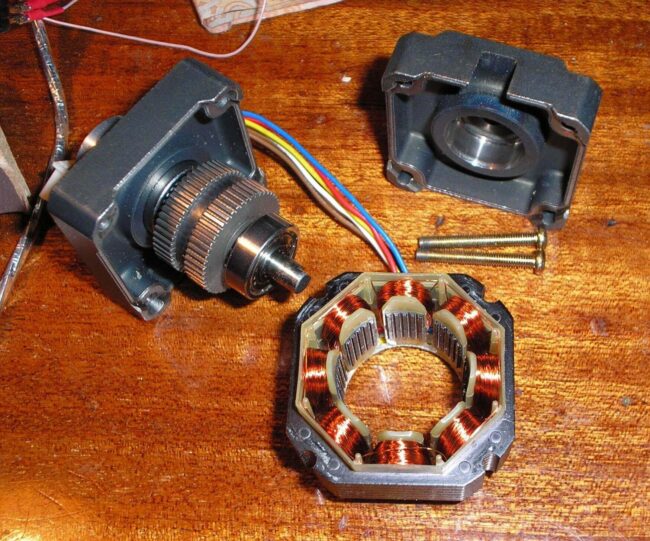
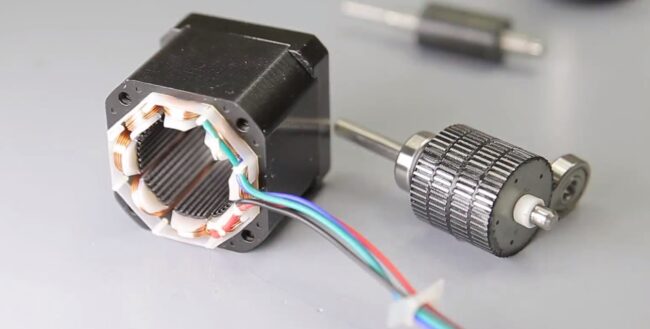
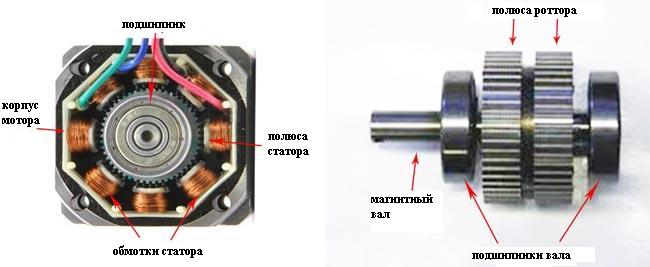
Если классифицировать данный тип мотора, то его мы отнесем к бесколлекторному синхронному мотору, в составе которого присутствуют статор и ротор.
Ротор имеет раздельные отсеки, состоящие из электротехнической стали, имеет «зубатую» структуру, а они разграничены постоянными магнитами. Статоре имеет специальные обмотки, которые схожи с катушками.
Как же это выглядит на деле?
Понять механизм действия шагового двигателя поможет схематическое изображение. первая позиция: на обмотки А и В подается напряжение установленной полярности.
Затем в статоре формируется электромагнитное поле. в силу того, что разноименные полюса притягиваются, ротор примет свою позицию по оси магнитного поля.
Кроме этого, поле шагового двигателя защищает от возможных действий с целью поменять позицию ротора снаружи. Упростив длинные объяснения, можно сказать так: магнитное поле статора обеспечивает установленную позицию ротора, несмотря на тяжесть.
При условии, когда на обмотки D и С попадает напряжение такой же полярности, электромагнитное поле меняет положение.

При этом ротор совершает шаг номер два, поворачиваясь на девяносто градусов. Третий шаг совершается, когда на обмотки А и В попадает напряжение обратной полярности.
При этом, ротор перемещается к положению, равному ста восьмидесяти градусам и устанавливается в положении, диаметрально противоположному первому.
Далее следует смещение к двумстам семидесяти градусам, когда на обмотки D и C приходится напряжение обратной полярности. Последний, четвертый шаг, совершается, когда на обмотки А и В подается напряжение с позитивным зарядом.
Таким образом, поворот станет равен тремстам шестидесяти градусам. Пропустить один из шагов не удастся. Ротор должен пройти полный оборот, шаг за шагом.
Если попытаться подключить обмотки из первого положения в четвертое, ротор сделает поворот в обратную сторону.
Обмотки бывают разные
В шаговых моторах используют биполярные или униполярные обмотки. Как это работает мы объясняли на примере биполярного устройства. Такой механизм предполагает применение отличных друг от друга фаз для снабжения обмоток.
Такая схема достаточно трудная, кроме того, для нее нужны сильные платы управления, которые стоят немалых денег.
Приборы с униполярными обмотками имеют более простой тип управления. Такие схемы имеют общий «плюс» подключения. На вторые выводы обмоток в порядке очереди подается «минус». Вот так и совершается работа ротора.
Каждый из этих типов имеет преимущества и недостатки. Биполярные шаговые моторы мощнее униполярных, их крутящий момент на сорок процентов превосходит униполярки, хотя вторые легче в управлении.
Типы двигателей по конструкции ротора
Шаговые двигатели делятся зависимо от типа устройства ротора Зависимо от того, какой ротор используют в конкретном устройстве, моторы можно разделить на следующие виды:
- с установленным магнитом;
- с альтернирующим магнитным противодействием;
- гибридные.
Шаговые двигатели с установленными магнитами на роторе аналогичны тем, о которых мы говорили ранее.
Есть разница только в одном аспекте: в настоящем устройстве магнитов очень много. Они расположены на одном диске.
Численность полюсов в нынешних двигателях достигает сорока восьми. Одна поступь в данном моторе равен семь с половиной градусов. Неплохо, да?
Шаговые двигатели с альтернирующим магнитным противодействием. Такой тип ротора в своей конструкции имеет мягкие магнитные сплавы, их так же именуют «реактивными шаговыми моторами».
Ротор состоит из дискретных пластин и в разрезе имеет вид зубчатого колеса.
Подобная схема строения нужна с той целью, что это позволяет замкнуть магнитный поток через зубцы колеса.
Преимущество данного типа мотора состоит вот в чем: здесь нет ничего, что затормозило бы работу двигателя. Соль в том, что ротор с установленными магнитами притягивается к частям двигателя, которые состоят из металла.
Обеспечить непрерывную работу шагового двигателя без напряжения практически невозможно. Но данный тип устройства эту проблему решил на корню. Но имеется и слабое место, а именно — маленький крутящий момент. Это значит, что одна поступь такого мотора будет равна от пяти до пятнадцати градусов.
Гибридный тип двигателя соединил оптимальные качества предшествующих. У них маленький шаг ( девять десятых – пять градусов), высокий момент и удерживающая способность. Главной фишкой тут мы считаем максимальную точность работы аппарата.
Этот двигатель используют в новых устройствах, где точность ставят первоочередной задачей. Но, есть одно «но» — цена.
За такое удовольствие придется дорого платить. Схематично такой ротор можно описать как цилиндр с магнитными свойствами, который имеет мягкомагнитные зубцы.
Проследим закономерность на деле: возьмем шаговый двигатель на двести шагов. Для него нужно два зубчатых диска, по пятьдесят зубцов.
Наш диск смещается на ползуба, таким образом, проем положительного полюса попадает на шип негативно заряженного . Итого, оказывается сто полюсов с обратной полярностью.
Методы управления шаговым мотором:
- Волновой. При таком типе управления напряжение поступает на одну из катушек, к ней притягивается ротор. Но такой вариант высокую мощность обеспечить не сможет.
- Полношаговое координирование осуществляется следующим образом: обе обмотки задействованы сразу, соответственно мощность будет высокой.
- Полушаговый. Это смесь из предыдущих двух методов. При таком типе управления напряжение идет поочередно: на одну обмотку, а потом – на обе. Таким образом, мы получим много шагов, высокую мощность, а так же в случае чрезмерного разгоне срабатывает удерживающая сила, которая тормозит мотор, когда это необходимо.
- Микрошаговое управление осуществляется с микроступенчатых импульсов. Это обеспечивает плавную работу мотора.
Плюсы и минусы шаговых моторов
Смело запишем к преимуществам следующее:
- высокие скорости старта, тормоза и реверса;
- вал делает оборот в согласно команде главного устройства на указанный угол;
- точная фиксация позиции после тормоза;
- четкость установки позиции;
- максимальная надежность в связи с отсутствием коллектора;
- обеспечение наибольшего крутящего момента при низких скоростях.

- есть риск изменения позиции в случае перегрузки вала, которая превышает ПДК для шагового мотора;
- риск резонанса;
- трудности в управлении;
- низкая скорость оборотов, хотя это не совсем минус, так так ШД применяют не для обеспечения вращения, а для обеспечения определенных позиций элемента в конкретный момент.
Наш шаговый мотор имеет второе имя, которое дает максимальное описание устройства, а именно: «электродвигатель с конечным числом положений ротора». Их используют в новых устройствах, таких, как 3D-принтеры, роботы, станки.
Конкурентоспособной альтернативой для него есть сервопривод, хотя они оба имеют свою нишу использования, которая определяется случаем.
ПОЛЕЗНО Шаговые двигатели, характеристики. Драйверы шаговых двигателей, разновидности, настройка.
Alsan
Alsan
МЕСТНЫЙ СТАРОЖИЛА
- 01.05.2019
- Последнее редактирование: 04.05.2019
-
Рекомендованный
- #1
На форуме периодически всплывают вопросы о драйверах шаговых двигателей и их настройке. Решил разобраться с этим делом для себя, возможно кому-нибудь также пригодится.
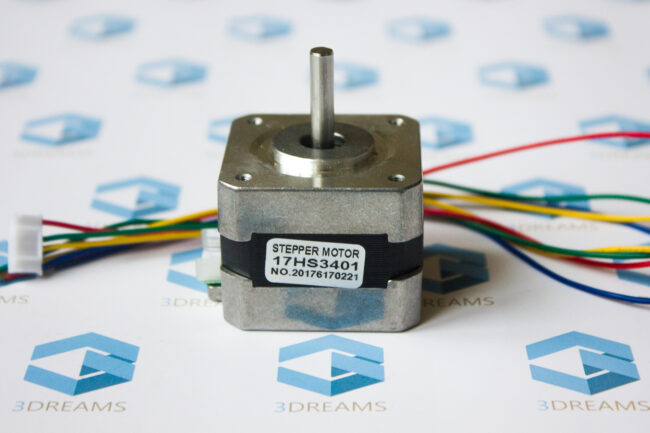
Для начала разновидности двигателей Nema17.
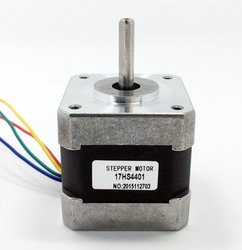
17HS4401 ток 1,7A – обычные
17HS8401 ток 1,8А – более мощные
17HS4402 ток 1,3A – по некоторым сведениям менее шумные, чем 17HS4401
Nema17BH 42BHM(42BYG) — в архиве: Nema17 — (описание и параметры разновидностей ШД)
(здесь важен ток двигателя, для дальнейших расчетов).
А4988
Встречаются варианты разного цвета.
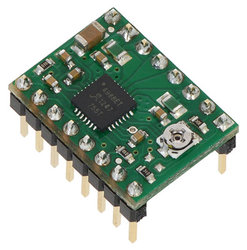
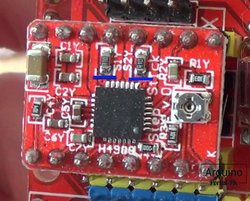
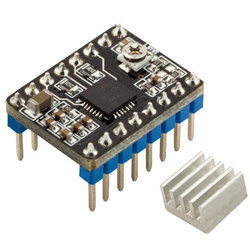

Поэтому нужно обращать внимание не на цвет, а на микросхему драйвера.
Схема и распиновка:
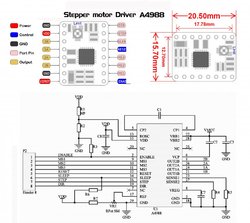
Характеристики А4988
Напряжения питания логической части: 3-5,5 В
Напряжения питания силовой части: 8-35 В
Максимальный ток без дополнительного охлаждения: 1 А
Максимальный ток с дополнительным охлаждением: 2 А
Дробление шага: 1, 1/2, 1/4, 1/8, 1/16
Защита от перегрузок и перегрева
Назначение контактов драйвера A4988
ENABLE – включение/выключение драйвера
MS1, MS2, MS3 – контакты для установки микрошага
RESET — cброс микросхемы
STEP — генерация импульсов для движения двигателей (каждый импульс – шаг), можно регулировать скорость двигателя
DIR – установка направление вращения
VMOT – питание для двигателя (8 – 35 В)
GND – общий
2B, 2A, 1A, 1B – для подключения обмоток двигателя
VDD – питание микросхемы (3.5 –5В)
Значение микрошага устанавливается комбинацией сигналов на входах MS1, MS2, и MS3. Есть пять вариантов дробления шага.
MS1 MS1 MS1 Дробление шага
0 0 0 1
1 0 0 1/2
0 1 0 1/4
1 1 0 1/8
1 1 1 1/16
Для работы в режиме микрошага необходим слабый ток. На модуле A4988 поддерживает тока можно ограничить находящимся на плате потенциометром. Драйвер очень чувствителен к скачкам напряжения по питанию двигателя, поэтому производитель рекомендует устанавливать электролитический конденсатор большой емкости по питанию VMOT для сглаживания скачков. Внимание ! — Подключение или отключение шагового двигателя при включённом драйвере может вывести двигателя и драйвер из строя.
Настройка Vref для A4988
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов(Rs). Это два черных прямоугольника на плате драйвера. Обычно подписаны R050(номинал — 0.05 Ом) или R100 (номинал — 0.1 Ом).
Vref = Imax * 8 * (Rs)
Imax — ток двигателя;
Rs — сопротивление резистора. В моем случае Rs = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Обычно Vref ставят ниже, для снижения температуры нагрева шагового двигателя.
Исходя из этого, при длительной работе, на практике можно использовать коэффициент 0,6
Получается для Для 17HS4401, с током 1,7А Vref = 1,7 * 8 * 0,100*0,6=0,816 (0,82)
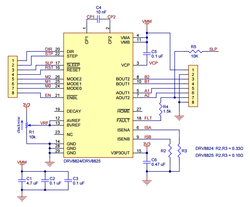
DRV8825
Плата создана на базе микросхемы компании TI (Texas Instruments Inc.) DRV8825 — биполярном шаговом драйвере двигателя. Расположение выводов и интерфейс модуля почти совпадает с драйвером шагового двигателя Pololu на микросхеме A4988, поэтому DRV8825 может стать высокопроизводительной заменой этой платы во многих приложениях.
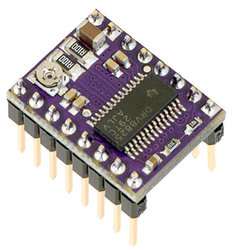
Схема:
Характеристики:
шаг:1, 1/2, 1/4, 1/8, 1/16, 1/32.
Регулировка тока на обмотках двигателя, переменным резистором опорного напряжения.
Источника питания для двигателей от 8,2 В до 45 В.
Встроенный регулятор напряжения для логических цепей. Возможность подключения к логике как 3,3 В, так и 5 В.
Защита от перегрева (отключение при нагреве драйвера 150 градусов).
Защита по превышению тока обмоток.
Защита по пониженному напряжению.
Защита от короткого замыкания на землю.
При токе до 1,5 А на обмотку способен работать без радиаторов и дополнительного охлаждения.
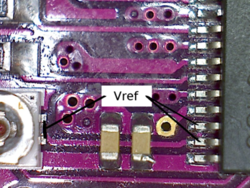
Регулировку тока двигателя следует производить выставив переменным резистором опорное наряжение (на выводах 12,13 микросхемы или на «среднем контакте резистора») из расчета 1 к 2, т.е 0,5В соответствует 1А, напряжению 1В соответствует 2А.
Обратите внимание, что переходное отверстие (золотистое) на плате, возле выводов 12,13 не является контактом для проверки опорного напряжения, это линия питания двигателей.
Режим микрошага устанавливается путем подачи «1» на контакты MODE0, MODE1, MODE2. (В случае установки драйвера на RAMPS это перемычки MS1, MS2, MS3)
M0 M1 M2 Режим микрошага
не стоит не стоит не стоит полный
стоит не стоит не стоит 1/2
не стоит стоит не стоит 1/4
стоит стоит не стоит 1/8
не стоит не стоит стоит 1/16
стоит не стоит стоит 1/32
не стоит стоит стоит 1/32
стоит стоит стоит 1/32
DRV8825 расчет Vref
Current Limit = Vref * 2
Vref = Current Limit / 2
Например для шагового двигателя 17HS4401: Vref = 1,7 / 2 = 0,85В
Обычно Vref ставят ниже, для снижения температуры нагрева шагового двигателя.
Детальное описание драйверов А4988 и DRV8825 в архиве А4988_DRV8825.rar
Встречалась информация ,что по умолчанию на драйверах DRV8825 выставлен максимальный ток, поэтому регулировка перед началом работы обязательна:
«По умолчанию у красных A4988 опора стоит в 0.8V это 1A ничего плохого не случится, но у DRV8825 опора выставлена в 1.6V -это максимальный ток, в теории 3.2А, по документации DRV8825 рассчитан максимум на 2.5A(2.2А с обдувом), это может повредить, как двигатель, так и драйвер.»
Принцип работы шагового двигателя
Каким образом роботизированный манипулятор на предприятии повторяет одни и те же движения снова и снова? Как автоматический фрезерный станок может двигаться с такой точностью? Это возможно благодаря шаговому двигателю. Особенность шагового двигателя заключается в том, что он может контролировать угловое положение ротора без замкнутого контура обратной связи, это простая и точная разомкнутая система.
p, blockquote 1,0,0,0,0 —>

p, blockquote 2,0,0,0,0 —>
Как работает шаговый двигатель с переменным магнитным сопротивлением
Для начала давайте разберемся, как работает шаговый двигатель с переменным магнитным сопротивлением, который является самым простым. Позднее мы рассмотрим устройство высокоточного и широко используемого типа двигателя. У этого двигателя 6 зубьев на статоре, которые могут быть запитаны от трех отдельных источников постоянного тока.
p, blockquote 3,0,0,0,0 —>

p, blockquote 4,0,0,0,0 —>
Ротор состоит из ряда стальных пластин. У него отличное от статора количество зубьев в данном случае их 4 это сделано намеренно, для того чтобы только одна пара зубьев ротора могла одновременно находиться напротив зубьев статора.
p, blockquote 5,0,0,0,0 —>

p, blockquote 6,0,0,0,0 —>
Вы и сами можете объяснить, как работает этот шаговый двигатель. Если обесточить обмотку A и запитать обмотку B станет ясно, что ротор будет двигаться, как показано на модели.
p, blockquote 7,0,0,0,0 —>

p, blockquote 8,0,1,0,0 —>
Из уроков геометрии понятно, что один шаг соответствует 30 градусам. Чтобы перейти к следующему шагу обесточим обмотку B и запитаем обмотку C.
p, blockquote 9,0,0,0,0 —>

p, blockquote 10,0,0,0,0 —>
После этого вновь запитаем обмотку A. То есть ротор занимает позицию с наименьшим сопротивлением.
p, blockquote 11,0,0,0,0 —>

p, blockquote 12,0,0,0,0 —>
Размер шага двигателя составляет 30 градусов, точность может быть доведена до 15 градусов при помощи одного простого приема, когда запитана обмотка A, ротор находится в таком положении мы знаем, что если запитать обмотку B он повернется на 30 градусов. Но что произойдет если обмотки A и B будут запитаны одновременно? Ротор займет положение между двумя этими обмотками, то есть повернется на 15 градусов.
p, blockquote 13,0,0,0,0 —>

p, blockquote 14,0,0,0,0 —>
После этого обесточим А. Когда ротор установится напротив обмотки B, запитаем обмотку С, такой тип работы называется режимом дробления шага.
p, blockquote 15,0,0,0,0 —>

p, blockquote 16,1,0,0,0 —>
Как работает гибридный шаговый двигатель
Двигатель который мы рассматривали, называется двигателем с переменным магнитным сопротивлением. Наиболее универсальными и широко распространенными являются гибридные шаговые двигатели. Рассмотрим работу стандартного гибридного двигателя с величиной шага в 1.8 градуса.
p, blockquote 17,0,0,0,0 —>

p, blockquote 18,0,0,0,0 —>
Гибридный двигатель имеет намагниченный по оси ротор со стальными зубчатыми наконечниками. Таким образом, одна сторона ротора является северным магнитным полюсом, а другая южным.
p, blockquote 19,0,0,0,0 —>

p, blockquote 20,0,0,0,0 —>
Точность данного двигателя заключается в продуманном расположении зубьев ротора и статора. Разберемся, как это работает. Ротор имеет 50 зубьев, чтобы понять, как расположены зубья статора для начала, предположим, что у статора тоже 50 зубьев. Однако на самом деле их на 2 меньше, чем у ротора. Таким образом у статор остается 48 зубьев.
p, blockquote 21,0,0,0,0 —>

p, blockquote 22,0,0,0,0 —>
Давайте разделим их на 4 группы попарно, как показано на модели (подробнее смотри на видео).
p, blockquote 23,0,0,0,0 —>
p, blockquote 24,0,0,1,0 —>
Теперь давайте выровняем эти группы, зеленая группа сдвигается так что она оказывается наполовину выровнены с зубьями ротора. Зубья желтой группы полностью смещены относительно зубьев ротора. Синяя группа наполовину выровнена относительно зубьев ротора. Красная группа остается на своем месте, то есть красная группа зубьев полностью выровнена с ротором, а желтая группа смещена. Две другие группы смещены лишь наполовину.
p, blockquote 25,0,0,0,0 —>

p, blockquote 26,0,0,0,0 —>
Следует помнить, что сторона ротора направленная к нам является южным магнитным полюсом. Обмотки статора соединяются следующим образом, они представляют собой две независимые группы обмоток. При подаче питания на обмотку A, статор образует следующую картину намагниченности. Одна пара полюсов статора действует как северный полюс, а другая как южный. Так как противоположные полюса притягиваются, они будут совмещены, полюса с одинаковой полярностью будут смещены.
p, blockquote 27,0,0,0,0 —>

p, blockquote 28,0,0,0,0 —>
Смотрите, что произойдет с ротором при подаче питания на обмотку B, он совершит вращение на небольшой угол чтобы вы равняться с новым северным полюсом. Очевидно, что этот угол составляет одну четвертую часть углового шага. Другими словами, ротор поворачивается на 1,8 градуса, затем задействуется обмотка A с противоположной полярностью и вновь ротор поворачивается на одну целую восемь десятых градуса.
p, blockquote 29,0,0,0,0 —>

p, blockquote 30,0,0,0,0 —>
Данный процесс повторяется и двигатель совершает высокоточные движения. Разрешение угла шага может быть улучшено при помощи дробления шага. Интересно отметить, что северные зубчатые наконечники находятся между южными зубчатыми наконечниками, таким образом гарантируется выравнивание полюсов с противоположными полярностями.
p, blockquote 31,0,0,0,0 —> p, blockquote 32,0,0,0,1 —>
Вот так работает гибридный шаговый двигатель, такие двигатели идеально подходят для применения в областях, где необходимы четкие движения и простое управление.
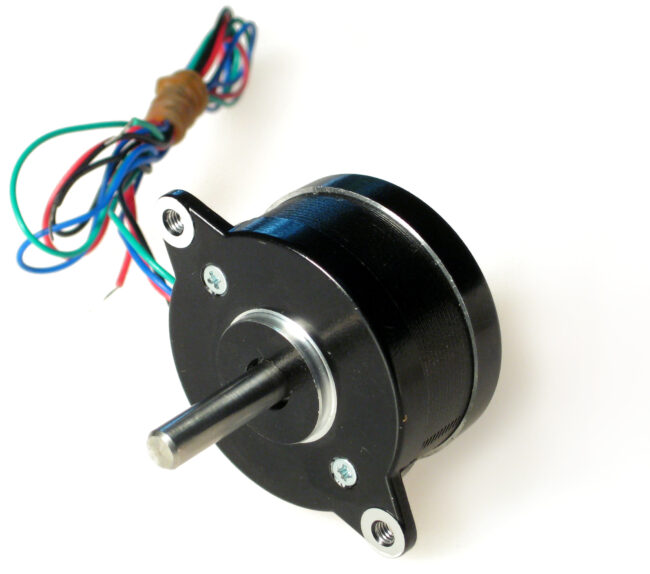
Шаговые двигатели
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных, например, индустриальных применениях.
По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Выбор контроллера для управления шаговым двигателем описан в статье Контроллеры ШД. Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка.
При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит.
В отличие от коллекторных двигателей, у которых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
Виды шаговых двигателей:
· двигатели с переменным магнитным сопротивлением
· двигатели с постоянными магнитами
· гибридные двигатели
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются.
Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки. В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга.
Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Биполярные и униполярные шаговые двигатели
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля.
Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности. Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
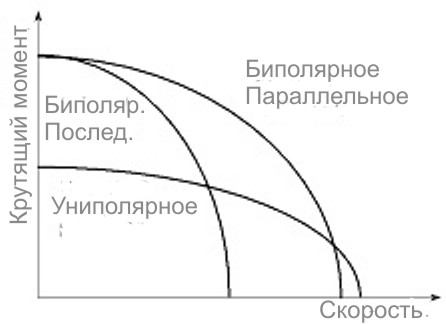
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать центральный отвод. Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения — биполярное. Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге. При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше. Это можно легко понять из следующих рассуждений. Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр. 2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр. 2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр. 2 * R = Iбиполяр. 2 * 2* R, откуда
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов — униполярное, последовательное либо параллельное подключение обмоток двигателя.
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать лишь две из четырех обмоток.
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр. 2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед. 2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр. 2 * R = Iпослед. 2 * 2* R, откуда
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток — 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении — Iуниполяр. 2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр. 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр. 2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
При выборе шагового двигателя одной из важнейших характеристик является его скоростные качества, то есть зависимость момента на валу от скорости вращения. Сравнить и оценить эту характеристику можно зная значения сопротивления и индуктивности обмоток выбираемого двигателя. Чем больше соотношение R/L тем быстрее нарастает ток в обмотках и тем большую скорость вращения можно достичь без существенного падения момента. Объясняется это тем, что э квивалентная схема представляет собой последовательно соединенные индуктивность и омическое сопротивление, возникающая в цепи ЭДС самоиндукции препятствует изменению тока в цепи, замедляя его возрастание, а также спад тока при размыкании цепи. Ток не может вырасти мгновенно до номинального значения, а следовательно, крутящий момент двигателя тоже нарастает не мгновенно, а по экспоненте. При увеличении скорости вращения не только увеличивается скорость коммутации обмоток, но также уменьшается время, на которое подается напряжение на обмотку. При критической скорости ток в обмотке двигателя еще не успевает вырасти до номинального значения, а напряжение с обмотки уже снимается. Происходит снижение крутящего момента, двигатель начинает пропускать шаги.