В чем преимущество высоковольтных двигателей
Что такое тиристорные возбудители и для чего они нужны?

Что такое тиристорные возбудители синхронных двигателей, как они работают и где применяются. Виды тиристорных возбудителей и режимы работы.
Электронные устройства управления возбуждением широко применяются в промышленности. Они необходимы для подачи напряжения на обмотку возбуждения и управления. Предусмотрены для регулировки в автоматическом режиме токов возбуждения при прямом или реакторном пуске от частотного преобразователя или сети. Реализует стабильную работу в режиме синхронной и аварийной работы мощных синхронных электродвигателей. Достоинствами таких систем являются простота управления, компактность, интеграция в системы электронного регулирования в автоматических системах управления, где применяется дистанционное изменение параметров. Далее мы подробно расскажем о том, что такое тиристорные возбудители, каких видов они бывают и как работают.
Описание и схема установки
Тиристорные возбудители экономичны, не сложны в эксплуатации и наладке. Выполнены в виде отдельно стоящего шкафа.
Ниже приведена схема и описание электронной установки с тиристорным управлением, из которой понятно из чего состоит прибор:
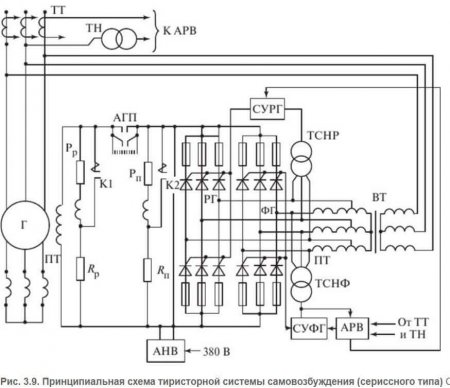
Конструкция прибора представляет:
- Управляемый выпрямитель, обеспечивающий питанием обмотки возбуждения синхронного двигателя. Представляет блок тиристоров с системой импульсно-фазового управления.
- Реактор, представляющий входной трансформатор.
- Модуль гашения поля.
- Система тестирования.
- Блок измерения, контролирующий уровень тока на выходе напряжения возбудителя и тока статора.
- Модуль защиты и блок сигнализации. Обеспечивает защиту индикации неисправности систем автоматического регулирования и диагностики.
Поставляется совместно с релейно-контактным узлом управления запуска двигателя. Имеет цифровую или аналоговую систему управления.
Тиристорный возбудитель позволяет:
- Подать напряжение на обмотки возбуждения в нерабочем состоянии электродвигателя, для тестового режима.
- В режиме прямого пуска подает напряжение на обмотки возбуждения, для поддержания функции тока статора, и тока скольжения.
- При реакторном пуске подача возбуждения после включения шунтирующего выключателя.
- Плавный (асинхронный) пуск с устройством высоковольтного плавного пуска.
- Обеспечивает синхронный запуск с применением высоковольтного частотного преобразователя.
Электронный возбудитель контролирует и поддерживает нормальную работу. При этом он обеспечивает безопасность оборудования, для чего нужен блок защиты:
- Защищает выходные цепи при превышении тока возбуждения от первоначально установленной величины.
- Производит защиту входных цепей при превышении сетевых токов предварительно заданный.
- Повреждения изолирующего контура.
- Аварийного отключения.
- От ошибки чередования фаз.
- Отсутствия силового напряжения.
- Ошибки синхронизации двигателя с параметрами сети.
- При аварийной ситуации электронного блока напряжения.
- Длительного запуска, отличного от заданного. Длительность пуска задается программным путем. Время превышения пуска считается ошибкой.
- Оповещение об асинхронном ходе.
- От внешних аварийных ситуаций.
- Производится защита от ошибок управления.
Если в комплектации возбудителя предусмотрена защита от снижения сопротивления изоляции внешнего контура, комплектуется дополнительно:
- Узлом постоянного контроля параметров сопротивления изоляции с отображением на дисплее.
- Наличием сухого контакта в случае уменьшения сопротивления изоляции, менее двух, постоянных значений, которые задаются наладчиками.
Наличие блока управления позволяет удерживать в пределах допуска напряжение в статоре, а также коэффициент производительности или возбуждения в автоматическом режиме. Характеристики задаются во время пуско-наладочных работ или дистанционно.
Внешний вид и внутренняя конструкция представлена на фото:

Режимы работы
Устройство обеспечивает три режима работы, автоматический, ручной и аварийный. Возможно изменение режимов во время функционирования двигателя. Переход от одного к другому не сопровождается бросками тока. Ниже познакомимся, как работает устройство.
Какие бывают и где применяются
Промышленность выпускает тиристорные возбудители уже много лет. Сейчас выпускаются модернизированные устройства с компьютерным управлением.
Устройства предназначены для запитывания обмоток возбуждения. С автоматическим регулированием тока при прямом, реакторном, частотном и плавном запусках.
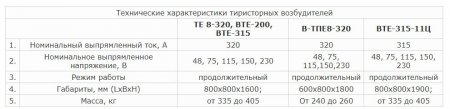
В таблице представлены типы возбудителей с характеристиками:
Область применения достаточно широка, применяются на ГЭС, электротехнической, металлургической, нефтехимической, химической и пищевой промышленности.
КАКОМУ ДВИГАТЕЛЮ ОТДАТЬ ПРЕДПОЧТЕНИЕ?
Наибольшее распространение в промышленности получили электрические двигатели двух видов: переменного тока — трехфазные асинхронные и постоянного тока — коллекторные с различными способами возбуждения. Какой же из них лучше использовать на электровозе?
Двигатели, которые могут быть использованы в качестве тяговых на электровозе, должны удовлетворять как минимум двум требованиям. Прежде всего они должны допускать возможность регулирования в широких пределах частоты вращения. Это позволяет изменять скорость движения поезда. Кроме того, необходимо иметь возможность регулировать в широком диапазоне силу тяги, т. е. вращающий момент, развиваемый двигателем. Так, двигатели электровоза должны обеспечивать значительную силу тяги во время трогания поезда, его разгона, при преодолении крутых подъемов и т. п. и снижать ее при более легких условиях движения.
С точки зрения организации движения, казалось бы, желательно, чтобы поезда независимо от изменения сопротивления движению перемещались с постоянной скоростью или эта скорость снижалась бы незначительно. В этом случае зависимость между силой тяги F и скоростью движения и (рис. 11, а) представляла бы в прямоугольных осях координат вертикальную прямую линию 1, параллельную оси F, или слегка наклонную линию 2. Зависимость между силой тяги, развиваемой двигателями локомотива, и скоростью его движения называют тяговой характеристикой и представляют ее графически, как показано на рис. 11, или в виде таблиц.

Изображенные на рис. 11, (а) тяговые характеристики являются жесткими. В случае жесткой характеристики мощность, потребляемая двигателями и равная произведению силы тяги на скорость, например, на крутых подъемах, возрастает пропорционально увеличению силы тяги (произведение V1F1 значительно меньше V2F2, см. рис. 11, а). Резкое увеличение потребляемой мощности приводит к необходимости повышения мощности как самих двигателей, так и тяговых подстанций, увеличения площади сечения контактной подвески, что связано с затратами денежных средств и дефицитных материалов. Избежать этого можно, обеспечив характеристику двигателя, при которой с увеличением сопротивления движению поезда автоматически снижалась бы его скорость, т. е. так называемую мягкую характеристику (рис. 11, б). Она имеет вид кривой, называемой гиперболой. Двигатель с такой тяговой характеристикой работал бы при неизменной мощности (V1F1= V2F2). Однако при движении тяжелых составов на крутых подъемах, когда необходима большая сила тяги, поезда перемещались бы с очень низкой скоростью, тем самым резко ограничивая пропускную способность участка железной дороги. Примерно такой характеристикой обладают тепловозы, так как мощность их тяговых двигателей ограничена мощностью дизеля. Это относится и к паровой тяге, при которой мощность ограничивается производительностью котла.
Мощность, развиваемая тяговыми двигателями электровоза, практически не ограничена мощностью источника энергии. Ведь электровоз получает энергию через контактную сеть и тяговые подстанции от энергосистем, обычно обладающих мощностями, несоизмеримо большими мощности электровозов. Поэтому при создании электровозов стремятся получить характеристику, показанную на рис. 11, (б) штриховой линией. Электровоз, оборудованный двигателями с такой характеристикой, может развивать значительную силу тяги на крутых подъемах при сравнительно высокой скорости. Конечно, мощность, потребляемая тяговыми двигателями в условиях больших сил тяги, повышается (V1’F1 несколько больше V1F1), но это не приводит к резким перегрузкам питающей системы.
Трехфазные асинхронные двигатели самые распространенные. Достоинства их трудно переоценить: простота устройства и обслуживания, высокая надежность, низкая стоимость, несложный пуск. Однако, как известно, частота вращения асинхронного двигателя почти постоянна и мало зависит от нагрузки, она определяется частотой подводимого тока и числом пар полюсов двигателя. Поэтому регулировать частоту вращения таких двигателей, а следовательно, и скорость движения поездов можно только изменением частоты питающего тока и числа пар полюсов, что трудно осуществить. Кроме того, как уже отмечалось выше, для питания таких двигателей требуется устраивать сложную контактную сеть. Поэтому асинхронные двигатели до недавнего времени почти не применяли на электровозах.
Благодаря развитию полупроводниковой техники оказалось возможным создать преобразователи однофазного переменного тока в переменный трехфазный и регулировать их частоту. Это позволило построить электровозы, на которых в качестве тяговых используются трехфазные асинхронные двигатели. Подробнее о таких электровозах будет рассказано ниже. Отметим, что абсолютно жесткой характеристикой (см. рис. 11, а) обладает синхронный двигатель.
В какой же степени отвечают требованиям, предъявляемым к тяговым двигателям, электрические машины постоянного тока? Напомним, что эти машины — генераторы и двигатели — различаются по способу возбуждения.

Обмотка возбуждения может быть включена параллельно обмотке якоря (рис. 12, а) и последовательно с ней (рис. 12, б). Такие двигатели называют соответственно двигателями параллельного и последовательного возбуждения. Используют также двигатели, у которых имеются две обмотки возбуждения — параллельная и последовательная. Их называют двигателями смешанного возбуждения (рис. 12, в). Если обмотки возбуждения включены согласно, т. е. создаваемые ими магнитные потоки складываются, то такие двигатели называют двигателями согласного возбуждения ; если потоки вычитаются, то имеем двигатели встречного возбуждения . Применяют и независимое возбуждение : обмотка возбуждения питается от автономного (независимого) источника энергии (рис. 12, г).
Чтобы оценить возможности регулирования частоты вращения двигателя постоянного тока, напомним, что при вращении в магнитном поле проводников обмотки якоря двигателя в них возникает (индуцируется) электродвижущая сила (э. д. с). Направление ее определяют, пользуясь известным правилом правой руки. При этом ток, проходящий по проводникам якоря от источника энергии, направлен встречно индуцируемой э. д. с. Напряжение Uд, подведенное к двигателю, уравновешивается э. д. с., наводимой в обмотке якоря, и падением напряжения в обмотках двигателя:

где I — ток электродвигателя; rд — эквивалентное сопротивление обмоток двигателя.
Значение э. д. с. Е пропорционально магнитному потоку и частоте вращения, с которой проводники пересекают магнитные силовые линии, т. е.

где С1 — коэффициент, учитывающий конструктивные особенности двигателя (число пар полюсов, число активных проводников обмотки якоря и число параллельных ветвей обмотки якоря) и размерности величин, входящих в формулу; Ф — магнитный поток; n — частота вращения якоря двигателя. Тогда


Эта формула позволяет определить зависимость между частотой вращения и магнитным потоком при постоянном значении приложенного напряжения. Эквивалентное сопротивление обмоток двигателя невелико и составляет обычно менее одной десятой Ома. Поэтому без ощутимой ошибки можно считать, что n ? Uд : C1Ф.
Следовательно, частоту вращения двигателя постоянного тока можно регулировать, изменяя подводимое к нему напряжение (прямая пропорциональность) или магнитный поток возбуждения (обратная пропорциональность) . Оба способа регулирования частоты вращения применяются на электровозах.
Как зависит вращающий момент от тока якоря? Если подключить проводники обмотки якоря двигателя к электрической сети, то проходящий по ним ток, взаимодействуя с магнитным полем полюсов, создаст силы, действующие на каждый проводник с током. В результате совместного действия этих сил создается вращающий момент М, пропорциональный току якоря и магнитному потоку полюсов Ф, т. е.

где Cм — коэффициент, который учитывает размерность величин, входящих в формулу, число проводников обмотки якоря и другие параметры двигателя.
Из этой формулы видно, что вращающий момент не зависит от подведенного напряжения.
Чтобы построить тяговую характеристику двигателя постоянного тока, необходимо установить, как изменяются частота вращения n и момент М в зависимости от тока при разных способах возбуждения двигателей. С увеличением нагрузки двигателей, например в случае преодоления подъема, при неизменном напряжении Uд будет возрастать и ток якоря, так как, чтобы преодолеть дополнительную нагрузку, двигатель должен развивать большую силу тяги, а следовательно, и мощность (как известно, Р= UдI).
Для двигателей с параллельным возбуждением можно считать, что ток возбуждения не изменяется с изменением нагрузки. Следовательно, не изменяется и магнитный поток. Так как сопротивление rд обмотки якоря невелико, то в соответствии с формулой (3) будет незначительно возрастать произведение Irд при постоянных Uд и Ф. Это значит, что частота вращения двигателя с параллельным возбуждением при увеличении нагрузки несколько уменьшается (рис. 13, а), а вращающий момент возрастает пропорционально увеличению тока, что графически изображается прямой линией, проходящей через начало координат.
Примерно такие же характеристики будут иметь двигатели с независимым возбуждением, если не изменяется ток возбуждения.

Рассмотрим те же характеристики для двигателя с последовательным возбуждением (см. рис. 12, б). У такого двигателя магнитный поток зависит от нагрузки, так как по обмотке возбуждения проходит ток якоря. Частота вращения якоря, как видно из формулы (4), обратно пропорциональна потоку и при увеличении тока якоря I, а значит и магнитного потока Ф, резко уменьшается (рис. 13, б). Вращающий момент двигателя, наоборот, резко возрастает, так как одновременно увеличиваются ток якоря и зависящий от него магнитный поток возбуждения.
В случае небольших нагрузок магнитный поток возрастает пропорционально току, а вращающий момент, как это следует из формулы (5),— пропорционально квадрату тока якоря. Если нагрузка увеличивается значительно, ток двигателя возрастет до такой степени, что наступит насыщение его магнитной системы. Это приведет к тому, что частота вращения будет снижаться уже в меньшей степени. Но тогда начнет более интенсивно возрастать ток, а значит, и потребляемая из сети мощность. При этом скорость движения поезда несколько стабилизируется. Зависимости частоты вращения якоря n, вращающего момента М и коэффициента полезного действия ? от потребляемого двигателем тока I называют электромеханическими характеристиками на валу тягового двигателя при неизменном напряжении Uд , подводимом к тяговому двигателю, и постоянной температуре обмоток 115°С (по ГОСТ 2582—81).
По электромеханическим характеристикам двигателя можно построить его тяговую характеристику. Для этого берут ряд значений тока и определяют по характеристикам соответствующие им частоту вращения и вращающий момент. По частоте вращения двигателя несложно подсчитать скорость движения поезда, так как известны передаточное число i редуктора и диаметр D круга катания колесной пары:

Поскольку в теории тяги пользуются размерностью частоты вращения якоря тягового электродвигателя, выраженной в об/мин, а скорость движения поезда измеряют в км/ч, то формула (6) с учетом коэффициента согласования этих размерностей принимает вид

Зная вращающий момент на валу двигателя, а также потери при передаче момента от вала тягового двигателя к колесной паре, которые характеризуют к. п. д. передачи можно получить и силу тяги, развиваемую одной, а затем и всеми колесными парами электровоза:

где Nкд — число тяговых двигателей локомотива или движущих колесных пар.
По полученным данным строят тяговую характеристику (см. рис. 11).
На электрических железных дорогах в качестве тяговых в подавляющем большинстве случаев используют двигатели постоянного тока с последовательным возбуждением, обладающие мягкой тяговой характеристикой. Такие двигатели, как отмечалось выше, при больших нагрузках вследствие снижения скорости потребляют меньшую мощность из системы электроснабжения.
Тяговые двигатели последовательного возбуждения имеют и другие преимущества по сравнению с двигателями параллельного возбуждения. В частности, при постройке тяговых двигателей устанавливают допуски на точность изготовления, на химический состав материалов для двигателей и т. п. Создать двигатели с абсолютно одинаковыми характеристиками практически невозможно. Вследствие различия характеристик тяговые двигатели, установленные на одном электровозе, при работе воспринимают неравные нагрузки. Более равномерно нагрузки распределяются между двигателями последовательного возбуждения, так как они имеют мягкую тяговую характеристику.
Однако двигатели последовательного возбуждения имеют и весьма существенный недостаток — электровозы с такими двигателями склонны к боксованию, иногда переходящему в разносное. Этот недостаток особенно резко проявился после того, когда масса поезда стала ограничиваться расчетным коэффициентом сцепления. Жесткая характеристика в значительно большей мере способствует прекращению боксования, так как в этом случае сила тяги резко снижается даже при небольшом скольжении и имеется больше шансов на восстановление сцепления. К недостаткам тяговых двигателей последовательного возбуждения относится и то, что они не могут автоматически переходить в режим электрического торможения: для этого необходимо предварительно изменить способ возбуждения тягового двигателя.
Электромобиль: преимущество и недостатки автомобилей на электрической тяге, есть ли у них будущее?

Электромобиль – это автомобильное средство с электрическим двигателем, который питается от автономного источника энергии – аккумулятора или альтернативного топлива.
По какому принципу работает электромобиль?
Электроэнергия от батареи попадает на разъем, затем при помощи педали акселератора поступает в электродвигатель, который в свою очередь запускает механизм вращения колес автомобиля. Вал электродвигателя напрямую соединен с колесами, именно поэтому электромобили не оснащаются коробками передач.
В настоящее время электромобиль приобретает все большую известность и популярность среди автомобилистов по всему миру. Часто его именуют как электромобиль, электрический автомобиль, электрокар, электрическое транспортное средство и EV.
История появления электромобиля
Первый прототип современного электрокара появился в 1841 году. Это была тележка с электрическим мотором. А вот первый автомобиль на электричестве, рассчитанный на двух пассажиров, был сконструирован инженером И.Романовым в 1899 году. Он был способен двигаться на скорости до 40 км/ч.
Начало 20 века ознаменовалось эпохой развития электрокаров. Так, в Америке около 100 тысяч автомобилей оснащались электрической системой управления, и это были не только легковые, но и грузовые автомобили и даже электробусы.
Первый автомобиль на электродвигателе, который смог развить скорость до 100 км/ч, носил название La Jamais Contente. Затем появились электрокары, развивавшие скорость вплоть до 130-140 км/ч.
Однако, несмотря на то, что первые электрокары стали достаточно скоростными, серьезной проблемой оставалась сложность зарядки электрических двигателей.
В середине 20 века интерес к электрическим автомобилям немного упал, однако с проявлением топливного кризиса в 70-х годах он вновь вспыхнул.
Преимущества электромобиля
Преимуществ у такого транспорта много, и, наиболее важные из них рассмотрим далее.
- Экологичность и отсутствие выхлопных газов. Электромобили не используют нефтепродукты, антифризные смеси, моторные и прочие масла, а, следовательно, не происходит выброса вредных выхлопных газов. Кроме того такой вид транспорта становится более безопасным в плане эксплуатации, поскольку максимально снижена его пожаро — и взрывоопасность.
- Низкая стоимость обслуживания и эксплуатации. Поскольку электроэнергия в разы дешевле топлива для автомобилей, экономия для водителя в финансовом плане очевидна.
- Высокий показатель КПД электродвигателя по сравнению с бензиновым двигателем. КПД электродвигателя достигает 95%, в то время как топливного двигателя – всего лишь 45%.
- Более простая, доступная, надежная и безопасная конструкция автомобиля.
- Возможность своевременной подзарядки двигателя, как от высоковольтного зарядного устройства (зарядной станции), так и от обычной домашней электросети.
- Низкий уровень шума благодаря небольшому количеству подвижных частей автомобиля и механической передачи.
Недостатки электромобиля
Помимо явных достоинств, электромобиль имеет и недостатки.
- Несовершенство электрических аккумуляторов для электромобилей. В настоящее время перед производителями стоит задача номер один – обеспечить массовый выпуск емких, безопасных и недорогих аккумуляторов для электрокаров. Те аккумуляторы, которые используются в большинстве моделей электрокаров, работают только при очень высоких температурах, а также являются достаточно дорогостоящими из-за применения драгоценных металлов для их производства.
- Быстрая потеря заряда. Кроме всего прочего такие батареи очень быстро теряют заряд и требуют постоянной длительной подзарядки. При этом большая часть энергии аккумулятора расходуется не на езду, а на обогрев/охлаждение автомобиля, питание бортовых систем и прочее.
- Утилизация. Не менее важным является вопрос безопасной утилизации электрических аккумуляторов, ведь многие из них содержат ядовитые вещества и даже кислоты.
- Возможный перегруз сетей электроснабжения при массовом заряде электрических аккумуляторов.
- Сравнительно небольшой пробег электромобилей на одной подзарядке аккумулятора. В среднем одна батарея емкостью до 24 кВт/ч позволяет электрокару преодолеть расстояние в 140-165 км. При использовании дополнительных систем (кондиционирования, охлаждения, радио, перевоз дополнительного груза) расстояние может сократиться до 85 км.
Перспективы развития
Согласно исследованиям, рынок электрокаров увеличится до 2015 года в 6-7 раз. Мировое производство электромобилей в 2015 году может составить до 600 тысяч в год. За последние 2-3 года в мире было продано полмиллиона электромобилей.
Около 35% всех электрокаров было продано в Соединенных Штатах. Примечательно, что темпы роста популярности этого вида транспорта в значительной степени превышают темпы роста продаж гибридных автомобилей.
По мнению большинства специалистов, темпы роста продаж электромобилей будут увеличиваться в связи со стремительным развитием соответствующей инфраструктуры по всему миру – созданию специализированных СТО для электрокаров, станций подзарядки, магазинов по продаже запчастей.
Что такое высоковольтный асинхронный двигатель
Особенности высоковольтных и низковольтных электродвигателей

Электродвигатели значительно облегчили повседневный быт, производственные и промышленные процессы. Они встречаются повсеместно: автомобили, стиральные машинки, блендеры, детские игрушки, станки, насосы, добывающие и обрабатывающие агрегаты. Главная их задача – преобразовать электроэнергию в механическое движение.
Высоковольтные электродвигатели по цене завода

Производство высоковольтных электродвигателей
Электродвигатели высоковольтные серии А — это асинхронные двигатели с короткозамкнутым ротором, которые выпускаются Новокаховским Электромеханическим заводом. Данная серия двигателей предназначена для привода механизмов, таких как насосы, вентиляторы, дымососы, не требующих регулирования частоты вращения.
Высоковольтные двигатели серии А изготавливаются на напряжения питания 6000 и 10000 В от сети переменного тока с частотой 50 или 60 Гц, предназначены для эксплуатации в длительном режиме S1. Степень защиты двигателей высоковольтных серии А — ИР 23.
Электродвигатели серии А имеют исполнение на подшипниках качения, и с одним концом вала. Обмотка статора выполнена с классом изоляции «F». Выводные концы обмотки выведены в коробку выводов, которая обеспечена предохранительной мембраной, соответствует требованиям по устойчивости к токам короткого замыкания.
Режим охлаждения двигателей — самовентиляция.
Для электродвигателей высоковольтных серии А базовым исполнением по климатическому исполнению и категории размещения является У3. Кроме этого, высоковольтные электродвигатели на 6000В также выпускаются в исполнениях У1, Т1, Т2, Т3; а двигатели серии А на 10000В также — в исполнении У1.
Структура условного обозначения двигателей высоковольтных серии А.
А — асинхронный двигатель с короткозамкнутым ротором.
400, 450, 500 — высота оси вращения (вала электродвигателя).
X, Y, XK, YK — длина двигателя условна.
4, 6, 8, 10, 12 — число полюсов обмотки статора.
У3 — климатическое исполнение и категория размещения.
Следует отметить, что двигатели серии А на 6000В выпускаются с типоразмерами оси вращения 400 и 450 мм и числом полюсов 4, 6, 8, 10 и 12. А двигатели серии А на 10000В — с типоразмером оси вращения 500 мм, а числом полюсов — 4, 6, 8.
Высоковольтные электродвигатели А 10000
1500 об/мин;
А-500ХК-4У3 — 0,87кВт
А-500х-4У3 — 0,87кВт
А-500YК1-4У3 — 0,88кВт
А-500YК-4У3 — 0,88кВт
А-500Y-4У3 — 0,89кВт
1000 об/мин;
А-500х-6У3 — 0,84кВт
А-500YК-6У3 — 0,84кВт
А-500Y-6У3 — 0,85кВт
750 об/мин
А-500ХК-8У3 — 0,80кВт
А-500х-8У3 — 0,80кВт
А-500Y-8У3 — 0,80кВт
Электродвигатели высоковольтные 6000 В, 10000 В

Производство высоковольтных электродвигателей
Электродвигатели асинхронные трехфазные высоковольтные c короткозамкнутым ротором используются для запуска в работу механизмов без регулировки частоты вращения, для привода в действие агрегатов с тяжелым пуском от сети с переменным током с напряжением 6000, 10000 В при частоте 50 Гц.
маркировка
Пример: двигатель «ДАЗО4-450Y-4МТ2», двигатель «АОД-1250-6У1», двигатель «АД-1250-8У3», где:
«ДАЗО4», «АОД», «АД» — обозначение серии, где АОД, ДАЗО4- асинхронный двигатель, обдуваемый, АД — асинхронный двигатель с режимом самовентиляции;
«450» — расстояние от оси вращения вала к плоскости установки электродвигателя — габарит;
«1250» — мощность кВт;
«Y» — условная длина электромотора;
«4», «6», «8» — число полюсов электромотора;
«Т2», «У1», «В3» — тропический и умеренный выполнения.
Технические характеристики высоковольтных электродвигателей
ООО «Электромеханический завод» представляет большой спектр высоковольтных двигателей серий:
А, ДАЗО4 на 6000 В (частота вращения 500 и 1500 об/мин, расстояние до оси вращения вала 400 и 450 мм, мощность 160 × 800 кВт)
А, ДАЗО4 на 10000 В (частота вращения 750 и 1500 об/мин, расстояние до оси вращения вала 500 мм, мощность 315 × 800 кВт)
А, ДАЗО4 12 и 13 габаритов (частота вращения 500 и 1500 об/мин, расстояние до оси вращения вала 1040 и 1180 мм, мощность 250 × 800 кВт)
АОД 560 габарита (частота вращения 500 и 1500 об/мин, расстояние до оси вращения вала 560 мм, мощность 315? 2000 кВт)
АД (частота вращения 500 и 750 об/мин, расстояние до оси вращения вала 560 мм, мощность 800 и 1250 кВт).
Особенности конструкции высоковольтных электродвигателей ДАЗО
Двигатели серии ДАЗО4 имеют степень защиты IP54, коробки выводов IP55, наружного вентилятора IP21, степень защиты двигателей АОД также IP54, а типа АД — IP23 в соответствии с требованиями МЭК 60034-5 (ГОСТ 17494). Двигатели разработаны для функционирования в длительном режиме S1, соответствующие требованиям стандартов МЭК.
В зависимости от метода охлаждения высоковольтные двигатели серии А, ДАЗО4, АОД выполняются в исполнении ICA01Ф61 соответствии с требованиями МЭК 60034-6 (ГОСТ 20459), в типа АД режим охлаждения — самовентиляция.
Монтажное исполнение высоковольтных двигателей — IM 1001, IM 1101 (тип АОД) по ГОСТ 2479.
Двигатели укомплектованы частотным преобразователем. Прямой запуск высоковольтного двигателя обеспечивается не только при номинальном напряжении в сети, но и при его падении до 0,8 U ном на время пуска. Двигатели ДАЗО4 оснащены подшипниками качения (смазка пластичная). Температура подшипников контролируется термопреобразователями сопротивления. Двигатели соединены с приводным механизмом с помощью упругих муфт. Класс изоляционного материала обмотки не ниже «В». Фазы обмотки соединяются по схеме «звезда». Температура и обмотки, и сердечника статора находится под контролем шести термопреобразователей, лежащих в пазах статора.
Двигатели ДАЗО4 выполняют правосторонние и левосторонние вращения. Изменение направления вращения выполняется только из состояния покоя.
Двигатели серии АОД, АД выполнены также на подшипниках качения с единственным валом. Выводные концы собраны в коробке выводов с предохранительной мембраной. Коробка соответствует нормативам по устойчивости к току короткого замыкания. Большая мощность и значительное напряжение питания повлияли на конструктивные особенности: в статорах высоковольтных двигателей термореактивная изоляция — тип «Монолит-2» (допустимая заливка жидким компаундом концов кабеля питания), на рабочем валу установлен роликовый подшипник.
Для высоковольтных двигателей разрешается один пуск в горячем состоянии и два подряд при холодном. Пауза между следующими пусками должна быть 3:00 и более, число пусков не должно превышать 500 за двенадцать месяцев и 10 000 за весь период работы.
Область применения высоковольтных электродвигателей
Высоковольтные двигатели нашли широкое применение в строительстве, транспортной отрасли, горнодобывающей, металлургической промышленности при эксплуатации на открытом воздухе, а также в промышленных помещениях. Примером могут служить насосы, дымососы, вентиляторы и др.
условия эксплуатации
Высоковольтные электродвигатели выполнены в климатическом исполнении У1, У3, Т1, Т2, Т3, в соответствии с требованиями ГОСТа 15150. Купить высоковольтные электродвигатели не совсем легко. Для осуществления правильной покупки обращайтесь за консультацией к специалистам ООО «Электромеханический завод». В любую минуту менеджеры на связи, готовы содействовать в грамотном подборе оборудования, исходя из задач его использования, по оптимальной цене, которая сможет удовлетворить любого клиента.
Производители высоковольтных электродвигателей
В России сосредоточены основные производственные мощности высоковольтных двигателей 6 кВ:
- «Баранчинский электромеханический завод»
- «Сафоновский электромашиностроительный завод»
- НП ЗАО «Электромаш», ОАО НПО «ЭЛСИБ»
- ООО «НПО «Ленинградский Электромашиностроительный Завод»
Доступны для покупки только в виде неликвидов.
В Украине данный вид оборудования выпускает ОАО «ПЭМЗ им К. Маркса» (не работает с 2014 года), АО «Завод Крупных Электрических Машин»
Также набирают популярность высоковольтные электромоторы китайского производства.
Цены на Электродвигатели высоковольтные 6000В, 10000В
| Наименование | Код товара | Цена, грн. с НДС |
|---|---|---|
| Электродвигатель АОД-1000/500-8/10У1 | id14494 | Договорная |
| Электродвигатель АОД-1250/800-8/10У1 | id14495 | Договорная |
| Электродвигатель АОД-1250-4У1 | id14383 | Договорная |
| Электродвигатель АОД-1250-6У1 | id14489 | Договорная |
| Электродвигатель АОД-1600/800-10/12У1 | id14491 | Договорная |
| Электродвигатель АОД-1600-10У1 | id14483 | Договорная |
| Электродвигатель АОД-1600/800-6/8У1 | id14490 | Договорная |
| Электродвигатель АОД-800/400-8/10У1 | id14493 | Договорная |
| Электродвигатель АОД-1600-12У1 | id14484 | Договорная |
| Электродвигатель ДАЗО4-12-55-8У1 | id14024 | Договорная |
Отличительные особенности электродвигателя высоковольтного А4
Ток статора высоковольтных двигателей напряжением 3000В в два раза больше, чем у двигателей напряжением 6000В.
Номинальный режим работы — продолжительный S1.
Конструктивное исполнение двигателей — IМ1001.
Степень защиты двигателя— IР23, коробки выводов IP55. Способ охлаждения двигателей — ICA01.
Двигатели имеют подшипники качения с пластичной смазкой. Электродвигатели могут комплектоваться подшипниками SKF,CNR, FAG или любые другие по согласованию с заказчиком.
Соединение двигателей с приводным механизмом осуществляется посредством упругих муфт. Изоляционные материалы обмотки статора класса нагревостойкости не ниже “В”. Изоляция обмотки статора термореактивная типа “Монолит-2”.
Обмотка статора имеет шесть выводных концов, закреплённых на четырех изоляторах в коробке выводов. Соединение фаз обмотки — звезда.
Двигатели допускают правое и левое направление вращение. Изменение направления вращения осуществляется только из состояния покоя.