Шаговым двигателем драйвер usb схема
Шаговым двигателем драйвер usb схема
![]()
![]()

Новичок

Группа: Пользователи
Сообщений: 30
Регистрация: 9.7.2008
Из: Рига, Латвия
Пользователь №: 6322
Попробую эту схему. Вместо поливиков попробую максималльно быстрые IGBT, и микруха А 3986.
или Keling KL-11078.
но от него 300 В тоже не отжать
а моторчик чудесный
A по чём такая штука?



![]()
![]()
Завсегдатай
Группа: Пользователи
Сообщений: 274
Регистрация: 19.10.2006
Пользователь №: 13
![]()
![]()
Завсегдатай
Группа: Пользователи
Сообщений: 177
Регистрация: 5.11.2007
Из: ст.Каневская
Пользователь №: 956
2 замечания: нет снабберов (судя по резисторам в цепях затвора на схеме они нужны).
И нет (по крайней мере на схеме) защитных диодов.
Да еще на защелкивание надо обсчитывать.
Для такого движка, (я хоть и не спец) но даже не стал бы пытаться такую схему сделать — сгорит однозначно.
По силе надо спеца искать или, действительно, купить готовое.
Если что приобретёте — цену напишите. Хоть ориентироваться.
![]()
![]()
Новичок
Группа: Пользователи
Сообщений: 32
Регистрация: 8.4.2009
Пользователь №: 28824
![]()
![]()
Постоялец
Группа: Пользователи
Сообщений: 82
Регистрация: 28.11.2008
Пользователь №: 15799
![]()
![]()
Новичок
Группа: Пользователи
Сообщений: 32
Регистрация: 8.4.2009
Пользователь №: 28824
![]()
![]()
Постоялец
Группа: Пользователи
Сообщений: 82
Регистрация: 28.11.2008
Пользователь №: 15799
Если говорить о схеме из поста #8, то это сервозаменитель ШД, т.е. вариант замены мощного ШД на более доступный и быстрый DC, что несколько усложняет радиолюбительское изготовление контроллера.
При питании от сети напряжение будет 320В постоянного тока и полевиков для такого напряжения предостаточно. Сложнее будет найти двигатель на это напряжение.
А причем здесь асинхронники, IGBT модули, КПД и пр.?
Сообщение отредактировал clon — 10.4.2009, 12:17
![]()
![]()
Новичок
Группа: Пользователи
Сообщений: 32
Регистрация: 8.4.2009
Пользователь №: 28824
Если говорить о схеме из поста #8, то это сервозаменитель ШД, т.е. вариант замены мощного ШД на более доступный и быстрый DC, что несколько усложняет радиолюбительское изготовление контроллера.
При питании от сети напряжение будет 320В постоянного тока и полевиков для такого напряжения предостаточно. Сложнее будет найти двигатель на это напряжение.
А причем здесь асинхронники, IGBT модули, КПД и пр.?
Просто я думаю сделать привод(для ЧПУ станка) собственного изготовления (включая двигатель).Хочу получить рабочую подачу порядка 6000 мм/мин, а скорость быстрых перемещений около 10000 мм/мин при мощности в 750 Вт.Рассматривал вариант вентильно-реактивного двигателя (конструктивно самый простой),но оказалось что это тотже реактивный шаговый но с меньшим числом шагов.6000 мм/мин это при шаге винта ШВП 5мм 1200 об/мин. Для вентильно-реактивного и BLDC(бесколекторного) это мало, а шаговый крутится но момент катострофически падает примерно после 300 об/ми. Увиличить момент шагового двигателя на высоких оборотах можно уменьшением индуктивности, увеличением сопротивления фазной катушки двигателя либо увеличить напряжение питания.Вот я и подумал, а почему если так влияет напряжение не делают шаговики на сетевое напряжение. И блок питания двигателей не нужно было бы. Е щё в какой-то книге читал что при увеличении напряжения на фазной обмотке растёт КПД двигателя. Например есть бесколекторники для авиамоделей, так у них токи до 200А при не большом напряжении и КПД 60-75%, а бесколекторники пременяемые в сервоприводах 92-98%.Ещё для увеличения момента на больших оборотах думаю снизить количество шагов на оборот, отсюда и угол шага в 3.6 и 7.2 градуса, дискрету перемещения оставить прежней при помощи более мелкого дробления шага.
Такие есть мысли.И вот вижу этот двигатель!Значет делают на 300В! Вот и написал осчущения.
По поводу асинхронников и IGBT модулей. Я так понял kulibin хочет сделать драйвер к этому красавцу, а значит нужна силовая часть на такое напряжение. Сам много времени потратил изучая чужой опыт управления двигателями на 220В( действительно после выпрямления да справильным конденсатором фильтра будет 311В). Вобщем люди пришли к выводу, что только IGBT транзисторы способны на это. Тем более есть силовые модули для управлени асинхронными приводами и они вроде тоже на IGBT,но они не подайдут для шаговика-там три фазы.Сам разбирал инвертор от своего Китайского шпинделя и обнаружил IGBT модуль.
Если что неправильно поправьте пожалуйста, я в этом деле новичок.
Введение в устройство шаговых двигателей

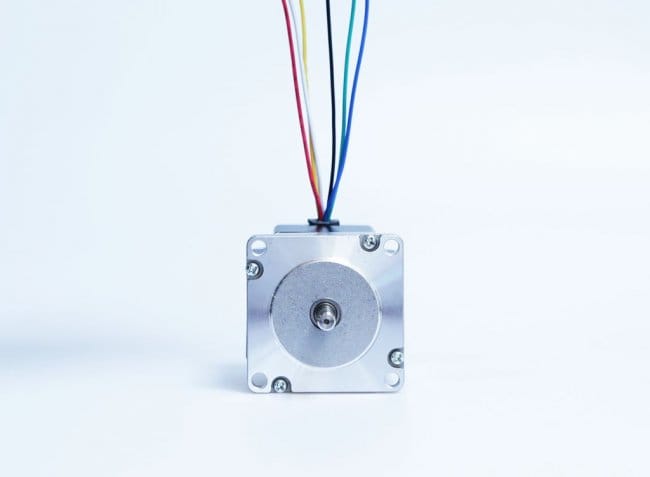
Если вы когда-либо имели удовольствие демонтировать старый принтер, чтобы сохранить электронные компоненты, то можете столкнуться с множеством цилиндрических загадочных моторов с 4 или более проводами, выступающими из сторон. Возможно, вы слышали характерное жужжание настольного 3D-принтера или глючную электромеханическую симфонию дисков в CD приводе? Если так, то вы столкнулись с шаговым двигателем!
Шаговые двигатели заставляют электромеханический мир вращаться ( с более высоким крутящим моментом!), но в отличие от обычного двигателя постоянного тока, управление шаговым двигателем требует чуть больше, чем ток через два провода. В этой статье будет рассказано о теории проектирования и эксплуатации шагового двигателя. Как только рассмотрим основы, автор данного руководства покажет, как построить простые схемы для управления шаговыми двигателями, а затем как использовать специальные микросхемы драйверов.
Шаг 1: Что делает мотор шаговым двигателем?
Кому может понадобиться более двух проводов и Н-мост? Зачем? Ну, в отличие от обычных щеточных двигателей постоянного тока, построенных для максимального числа оборотов (или кВ для RC), шаговые двигатели представляют собой бесщеточные двигатели, рассчитанные на высокий крутящий момент (впоследствии меньшую скорость) и более точное вращательное движение. В то время как типичный двигатель постоянного тока отлично подходит для вращения гребного винта на высокой скорости для достижения максимальной тяги, шаговый двигатель лучше подходит для прокатки листа бумаги синхронно со струйным механизмом внутри принтера или для осторожного вращения вала линейного рельса в мельнице с ЧПУ.
Внутри шаговые двигатели являются более сложными, чем простой двигатель постоянного тока, с несколькими катушками вокруг сердечника с постоянными магнитами, но с этой дополнительной сложностью обеспечивается больший контроль. Благодаря тщательному расположению катушек, встроенных в статор, ротор шагового двигателя может вращаться с заданным шагом, изменяя полярность между катушками и переключая их полярность в соответствии с установленной схемой зажигания. Шаговые двигатели не все сделаны одинаковыми, и для их внутреннего исполнения требуются уникальные (но базовые) схемы. Обсудим наиболее распространенные типы шаговых двигателей на следующем шаге.
Шаг 2: Типы шаговых двигателей
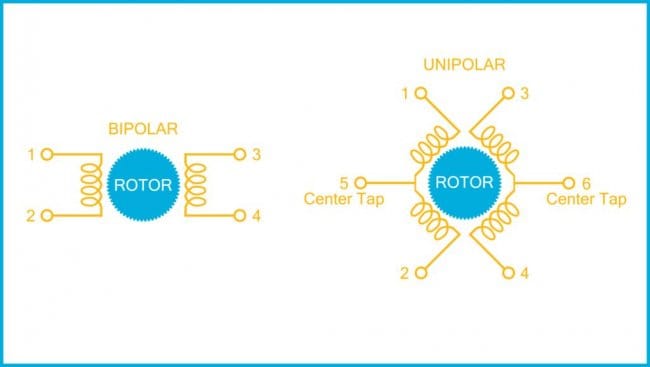

Есть несколько различных конструкций шаговых двигателей. К ним относятся однополярное, биполярное, универсальное и переменное сопротивление. Мы будем обсуждать конструкцию и работу биполярных и однополярных двигателей, так как это наиболее распространенный тип двигателя.
У однополярных двигателей обычно есть пять, шесть или восемь проводных выводов, идущих от основания, и одна катушка на фазу. В случае пятипроводного двигателя пятый провод представляет собой соединенные центральные отводы пар катушек. В шестипроводном двигателе каждая пара катушек имеет собственный центральный отвод. В двигателе с восемью проводами каждая пара катушек полностью отделена от других, что позволяет подключать ее в различных конфигурациях. Эти дополнительные провода позволяют приводить в действие однополярные двигатели непосредственно от внешнего контроллера с простыми транзисторами, чтобы управлять каждой катушкой отдельно. Схема зажигания, в которой приводится в действие каждая катушка, определяет направление вращения вала двигателя. К сожалению, учитывая, что за один раз подается только одна катушка, удерживающий момент однополярного двигателя всегда будет меньше, чем у биполярного двигателя того же размера. Обойдя центральные отводы однополярного двигателя, он теперь может работать как биполярный двигатель, но для этого потребуется более сложная схема управления. На четвертом шаге этой статьи мы приведем в действие однополярный двигатель, который должен прояснить некоторые из представленных выше концепций.
Биполярные двигатели, как правило, имеют четыре провода и являются более прочными, чем однополярный двигатель сравнительного размера, но поскольку у нас есть только одна катушка на фазу, нам нужно повернуть ток через катушки, чтобы перейти на один шаг. Наша потребность изменить ток означает, что мы больше не сможем управлять катушками напрямую с помощью одного транзистора, вместо этого — полная цепь h-моста. Построение правильного h-моста утомительно (не говоря уже о двух!), Поэтому мы будем использовать выделенный драйвер биполярного двигателя (см. Шаг 5).
Шаг 3: Понимание спецификаций шагового двигателя
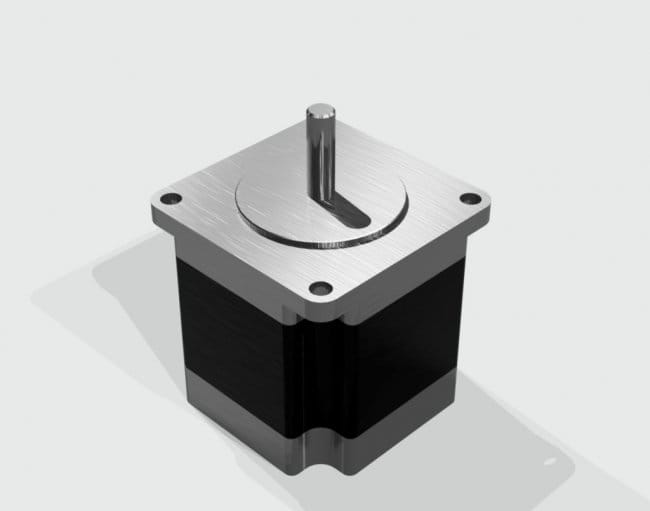
Давайте поговорим о том, как определить технические характеристики двигателя. Если вы встречали двигатель квадратного сечения с определенной сборкой из трех частей (см. Рисунок три), скорее всего, это двигатель NEMA. Национальная ассоциация производителей электрооборудования имеет определенный стандарт для спецификаций двигателя, использующий простой буквенный код для определения диаметра лицевой панели двигателя, типа крепления, длины, фазного тока, рабочей температуры, фазного напряжения, шагов на оборот и проводки.
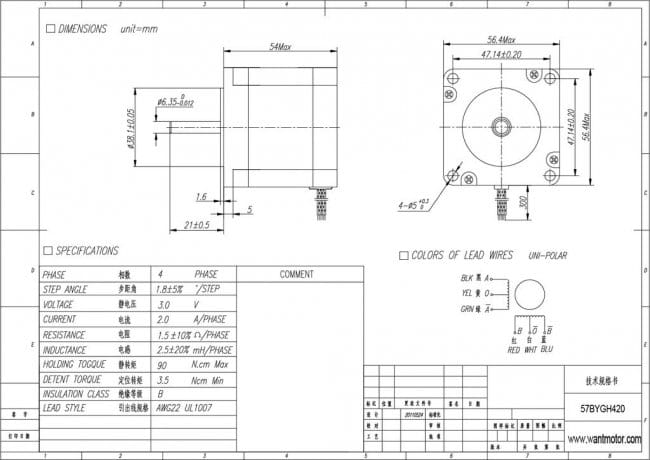
Чтение паспорта двигателя
Для следующего шага будет использован этот однополярный мотор. Выше приложена таблица данных. И хотя она краткая, она предоставляет нам все, что нам нужно для правильной работы. Давайте разберем, что в списке:
Фаза: это четырехфазный однополярный мотор. Внутренне двигатель может иметь любое количество реальных катушек, но в этом случае они сгруппированы в четыре фазы, которые могут управляться независимо.
Шаг угла: При приблизительном разрешении 1,8 градусов на шаг мы получим 200 шагов на оборот. Хотя это является механическим разрешением, с помощью микроперехода мы можем увеличить это разрешение без каких-либо изменений двигателя (подробнее об этом в шаге 5).
Напряжение: номинальное напряжение этого двигателя составляет 3 вольта. Это функция тока и номинальных сопротивлений двигателя (закон Ома V = IR, следовательно, 3V = 2A * 1,5Ω)
Ток: сколько тока нужно этому двигателю? Два ампера на фазу! Эта цифра будет важна при выборе наших силовых транзисторов для базовой схемы управления.
Сопротивление: 1,5 Ом на фазу ограничит то, какой ток мы можем подать на каждую фазу.
Индуктивность: 2,5 мГн. Индуктивная природа катушек двигателя ограничивает скорость зарядки катушек.
Удерживающий момент: это то, сколько фактической силы мы можем создать, когда на шаговый двигатель подано напряжение.
Момент удержания: это то, какой момент удержания мы можем ожидать от двигателя, когда он не находится под напряжением.
Класс изоляции: класс B является частью стандарта NEMA и дает нам рейтинг в 130 градусов Цельсия. Шаговые двигатели не очень эффективны, и постоянное потребление максимального тока означает, что они будут сильно нагреваться при нормальной работе.
Показатели обмотки: диаметр провода 0,644 мм., количество витков в диаметре 15,5, сечение 0,326 мм2
Определение пар катушек
Хотя сопротивление обмоток катушки может варьироваться от двигателя к двигателю, если у вас есть мультиметр, вы можете измерить сопротивление на любых двух проводах, если сопротивление Шаг 4: Непосредственное управление шаговыми двигателями
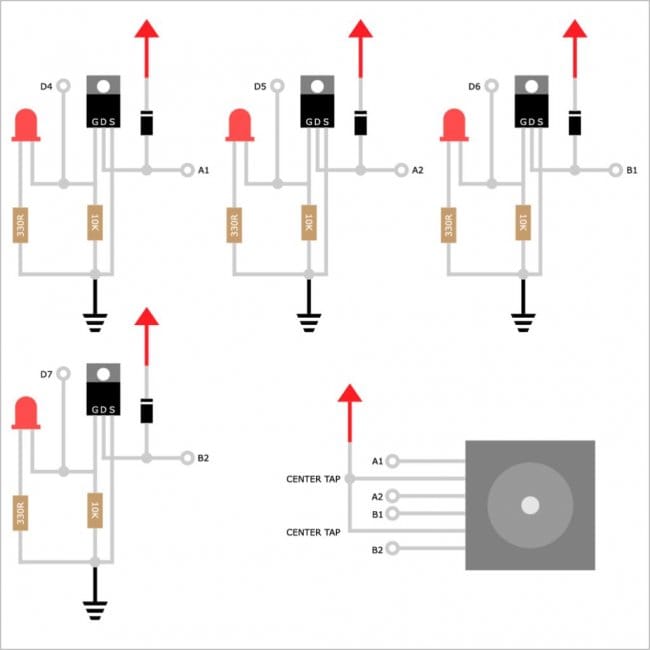
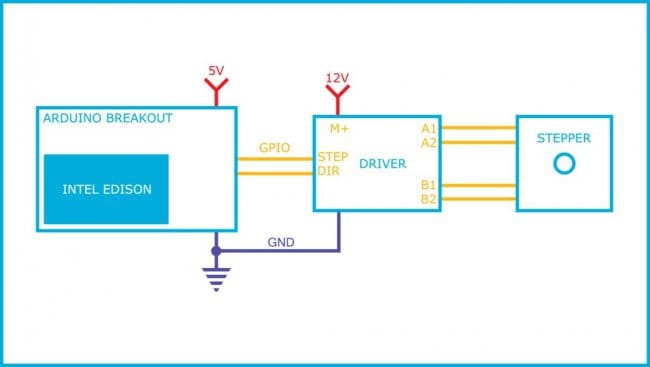
Благодаря расположению проводов в однополярном двигателе мы можем последовательно включать катушки, используя только простые силовые полевые МОП-транзисторы. На рисунке выше показана простая схема с МОП-транзистором. Такое расположение позволяет просто контролировать уровень логики с помощью внешнего микроконтроллера. В этом случае легче всего использовать плату Intel Edison с коммутационной платой в стиле Arduino, чтобы получить легкий доступ к GPIO (однако подойдет любой микро с четырьмя GPIO). Для этой схемы используется транзистор IRF510 N-канальный мощный MOSFET. IRF510, способный потреблять до 5,6 ампер, будет иметь достаточно свободной мощности, чтобы удовлетворить потребности двигателя в 2 амперах. Светодиоды не нужны, но они дадут вам хорошее визуальное подтверждение последовательности работы. Важно отметить, что IRF510 должен иметь логический уровень не менее 5 В, чтобы он мог потреблять достаточный ток для двигателя. Мощность двигателя в этой цепи будет 3 В.
Полное управление однополярным двигателем с помощью этой настройки очень простое. Для того, чтобы вращать двигатель, нам нужно включить фазы в заданном режиме, чтобы он вращался правильно. Чтобы вращать двигатель по часовой стрелке, мы будем управлять фазами следующим образом: A1, B1, A2, B2. Чтобы вращать против часовой стрелки, мы просто изменим направление последовательности на B2, A2, B1, A1. Это хорошо для базового контроля, но что, если вы хотите большей точности и меньше работы? Давайте поговорим об использовании выделенного драйвера, чтобы сделать всё намного проще!
Шаг 5: Платы драйверов шаговых двигателей
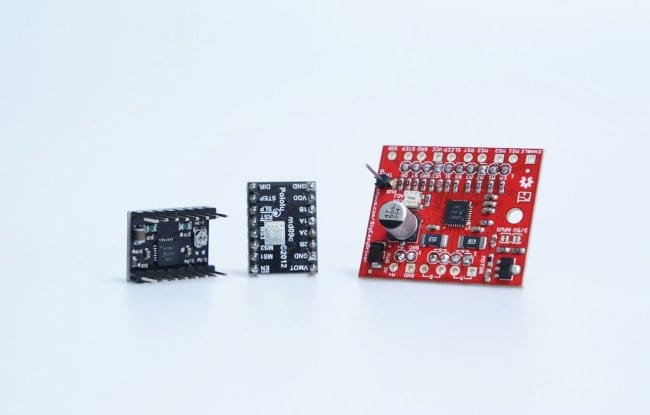
Если вы хотите приступить к управлению биполярными двигателями (или однополярными двигателями в биполярной конфигурации), вам нужно взять специальную плату управления драйвером. На фото выше изображен драйвер Big Easy Driver и плата-носитель драйвера шагового двигателя A4988. Обе эти платы являются печатными платами для микрошагового двухполюсного драйвера шагового двигателя Allegro A4988, который на сегодняшний день является одним из наиболее распространенных чипов для привода небольших шаговых двигателей. Помимо наличия необходимых двойных h-мостов для управления биполярным двигателем, эти платы дают много возможностей для крошечной недорогой упаковки.
Эти универсальные платы имеют удивительно низкое соединение. Вы можете начать управлять двигателем, используя только три соединения (только два GPIO) с вашим главным контроллером: общее заземление, шаг и направление. Ступенчатый шаг и его направление остаются плавающими, так что нужно привязать их к опорному напряжению с нагрузочным резистором. Импульс, посылаемый на вывод STEP, будет перемещать двигатель на один шаг с разрешением в соответствии с эталонными выводами микрошага. Логический уровень на выводе DIR определяет, будет ли двигатель вращаться по часовой стрелке или против часовой стрелки.
В зависимости от того, как установлены выводы M1, M2 и M3, вы можете добиться увеличения разрешения двигателя с помощью микрошагования. Микрошаг включает в себя посылку разнообразных импульсов, чтобы тянуть двигатель между электромагнитным разрешением физических магнитов в роторе, обеспечивая очень точное управление. A4988 может перейти от полного шага до разрешения шестнадцатого шага. С нашим двигателем 1,8 градуса это обеспечит до 3200 шагов за оборот. Поговорим о мелких деталях!
Подключение двигателей может быть легким, но как насчет управления ими? Посмотрите эти готовые библиотеки кода для управления шаговыми двигателями:
Stepper — классика, встроенная в Arduino IDE, позволяет выполнять базовый шаг и управление скоростью вращения.
AccelStepper — гораздо более полнофункциональная библиотека, которая позволяет лучше управлять несколькими двигателями и обеспечивает правильное ускорение и замедление двигателя.
Intel C ++ MRAA Stepper — библиотека более низкого уровня для тех, кто хочет углубиться в управление необработанным шаговым двигателем C ++ с помощью Intel Edison.
Этих знаний должно быть достаточно, чтобы вы поняли как работать с шаговыми двигателями в электромеханическом мире, но это только начало.
Управление униполярным шаговым двигателем с помощь USB персонального компьютера

*, студент 4 курса факультета технологии и профессионально педагогического образования, Т-ПРОИ101, Алтайской государственной академии образования имени , г. Бийск.
Эл. почта:Kraizer1993@mail.ru
Сл. телефон: +7(923)6497670
*, доцент кафедры физики и информатики, Алтайской государственной академии образования имени , г. Бийск.
Сл. телефон: +7(923)6480674
*, старший преподаватель кафедры физики и информатики, Алтайской государственной академии образования имени , г. Бийск.
Сл. телефон: +7(906)9417984
УПРАВЛЕНИЕ УНИПОЛЯРНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ С ПОМОЩЬ USB ПЕРСОНАЛЬНОГО КОМПЬЮТЕРА
Ключевые слова: Шаговый двигатель, драйвер шагового двигателя, драйвер USBasp, макетная плата AVR-USB-MEGA16, микроконтроллер ATMEGA32, библиотека LibUSB.
В статье затрагивается вопрос управлению униполярным шаговым двигателем через USB порт персонального компьютера. Задача состоит в том, чтобы с помощью USB персонального компьютера и драйвера управлять шаговым двигателем. В рамках данной работы предлагается решение данного вопроса с помощью: драйвера шагового двигателя состоящего из макетной платы AVR-USB-MEGA16 и силового модуля на основе транзисторов, системы программирования Delphi, дополнительной библиотеке для программирования LibUSB, прошивки для микроконтроллера ATMEGA32 и драйвера USBasp.
Шаговый двигатель широко используется в различных направлениях: в периферийных устройствах вычислительных машин, серийное печатающее устройство, двухкоординатный XY-графопостроитель, в станках с числовым программным управлением, XY-столы и вращающиеся столы, фрезерные станки, чертежные автоматы и другие применения. В работе рассмотрена система для управления шаговым двигателем через USB персонального компьютера и способ ее сборки.
Для реализации данной системы необходимо приготовить макетную плату AVR-USB-MEGA16 [1] к работе.
Первое, что нужно сделать — это прошить плату. Она снабжена загрузчиком bootloadHID, что позволит прошить ее через USB. Для этого устанавливаем перемычку между ножками 4 и 6 коннектора U1 ISP и подключаем плату к персональному компьютеру через USB. На ней загорится красный светодиод и в системе Windows обнаружится программатор USBasp. После чего запускаем программу для прошивки микроконтроллера и загружаем в нее прошивку для ATMEGA32 с необходимой частотой [2], прошиваем. Отключаем макетную плату AVR-USB-MEGA16 и удаляем перемычку.
Второе – необходимо установить драйвер USBaps [3] для платы, если его нет на персональном компьютере, на котором выполняется работа. Снова подключением плату к USB компьютера и он обнаруживает новое устройство. Если на нем не установлен драйвер, то он не сможет определить его. Для распознания платы через диспетчер устройств вручную устанавливаем драйвер. Теперь плата полностью готова к работе.
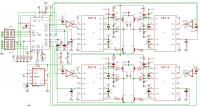
Силовой модуль системы состоит из четырех транзисторов (КТ972Б), четырех резисторов (330 Ом) и четырех диодов (1N4001S). Они соединены между собой по следующей схеме (Рис. 1) [2].

Рис. 1. Схема силового модуля
Работает силовой модуль по следующей схеме. При открывании одного из транзисторов, ток будет протекать через соответствующую обмотку шагового двигателя. Для управления транзисторами используются свободные выходы микроконтроллера платы AVR-USB-MEGA16.
Тип транзисторов зависит от мощности подключаемого двигателя, напряжения его питания и нагрузочной способности портов микроконтроллера. В данной конструкции использовались транзисторы КТ972Б, обладающие достаточным коэффициентом усиления по току, с допустимым напряжением коллектор-эммитер до 45 В, ток коллектора – до 4 А.
Поскольку нагрузка индуктивная, в схеме стоят защитные диоды. Использовались 1-амперные диоды 1N4001S, но можно обойтись и без них. Защитные диоды увеличивают время спада тока в обмотках шагового двигателя, что уменьшает максимально возможную частоту вращения шагового двигателя. Если убрать диоды, то время спада тока окажется минимальным, двигатель сможет вращаться быстрее, но при этом возникают опасные для транзисторов выбросы ЭДС самоиндукции, которые могут превысить допустимое для них напряжение 45 В.
Собираем все по схеме, представленной на рисунке 1, и техническая часть работы на этом заканчивается.
Перед тем как начать разработку управляющего алгоритма необходимо установить на персональный компьютер дополнительную библиотеку LibUSB [4]. Устанавливается она как обычная программа. После чего в среде программирования Delphi создаем, или берем готовый [2], дополнительный модуль LibUSB для библиотеки. Теперь приступаем к написанию общей части непосредственно самой программы. Общая часть включается в себя функции: получения ASCII последовательности, открытие устройство USB и послания сообщения контролеру через USB. Общую часть также можно взять из источника [2].
Отправка сообщения макетной плате через USB осуществляется через функцию SendUSBControlMessage (PC2USB, RQ_IO_WRITE, 1, aPORTA, 0, data);
SendUSBControlMessage … – имя функции.
… PC2USB … – сообщение отправляется от персонального компьютера в USB.
… RQ_IO_WRITE … — команда на запись.
.. 1, .. – что записываем в микроконтроллер.
… aPORTA, … — куда записываем или имя порта микроконтроллера.
… 0, data — что записываем в буфер обмена микроконтроллера.
Представленная выше функция подает напряжение в 5 вольт на свободный выход P1 макетной платы AVR-USB-MEGA16. SendUSBControlMessage (PC2USB, RQ_IO_WRITE, 2, aPORTA, 0, data) – подает напряжение на выход P2, а P1 станет без напряжения, так как 2 в двоичной системе счисления 0010, 0 пойдет на P1, а 1 на Р2. Для активации Р1 и Р2 одновременно достаточно написать SendUSBControlMessage (PC2USB, RQ_IO_WRITE, 3, aPORTA, 0, data). 3 в двоичной системе счисления это 0011. Чтобы сбросить напряжение на всех выходах «порта А» необходимо использовать команду SendUSBControlMessage (PC2USB, RQ_IO_WRITE, 0, aPORTA, 0, data).
Используя данную функцию, задаем последовательную активацию обмоток шагового двигателя. При этом опираемся на управляющею последовательность, представленную в таблицах 1 и 2.
Управляющая последовательность для полного шага
Драйвер шагового двигателя своими руками
Подробный обзор драйвер двигателя l298n для Arduino: характеристики, схемы подключения. Пример использования драйвер двигателя l298n на базе плат ардуино со всеми скетчами и библиотеками.
- Как крутить шаговый двигатель
- Камрад, рассмотри датагорские рекомендации
- Купон до 1000₽ для новичка на Aliexpress
- Полезные и проверенные железяки, можно брать
- Обзор драйвера L298N
- Схема шагового двигателя
- Применение
- Устройство двигателя
- Технические характеристики
- Управление скоростью двигателя с помощью ШИМ сигнала
- Программа для микроконтроллера на двигатель
- Планы на будущее контроллера
Как крутить шаговый двигатель
Шаговый двигатель работает от подачи комбинаций напряжения в разных направлениях на его обмотки, у этого шагового двигателя 2 обмотки – 4 провода, первая обмотка – черный (A) и зеленый (A*) провод, вторая обмотка – красный (B) и синий (B*). За одну смену комбинаций делается 1 шаг – 1,8 градусов. Если комбинации быстро менять, то двигатель будет быстро и точно позиционироваться – крутиться. Смена комбинаций возможна в двух направлениях, соответственно двигатель будет крутиться вперед или назад.
Чтобы крутить шаговый двигатель, надо:
1) Собрать устройство – USB контроллер шагового двигателя на микроконтроллере AVR и драйвер шагового двигателя, 2 в 1. Перед тем как собирать это сложное устройство, рекомендую сначало отдельно собрать и проверить работу только USB контроллера, его я уже собрал вот тут – контроллер USB. Если USB связь работает нормально, то можно приступать к изготовлению драйвера.
2) Написать программу для компьютера, которая будет посылать USB команды устройству.
3) Написать программу для микроконтроллера AVR, которая будет принимать USB команды и крутить двигатель.
Камрад, рассмотри датагорские рекомендации
Купон до 1000₽ для новичка на Aliexpress
Никогда не затаривался у китайцев? Пришло время начать!
Камрад, регистрируйся на Али по нашей ссылке. Ты получишь скидочный купон на первый заказ. Не тяни, условия акции меняются.
Полезные и проверенные железяки, можно брать
Куплено и опробовано читателями или в лаборатории редакции.
Обзор драйвера L298N
Драйвер L298N используется радиолюбителями для многофункционального управления двигателями постоянного тока. Схема модуля, состоящая из двух H-мостов, позволяет подключать к нему один биполярный шаговый двигатель или одновременно два щёточных двигателя постоянного тока. При этом есть возможность изменять скорость и направление вращения моторов. Управление осуществляется путём подачи соответствующих сигналов на командные входы, выполненные в виде штыревых контактов. На рисунке №1 показан внешний вид модуля с кратким описанием всех его составляющих.
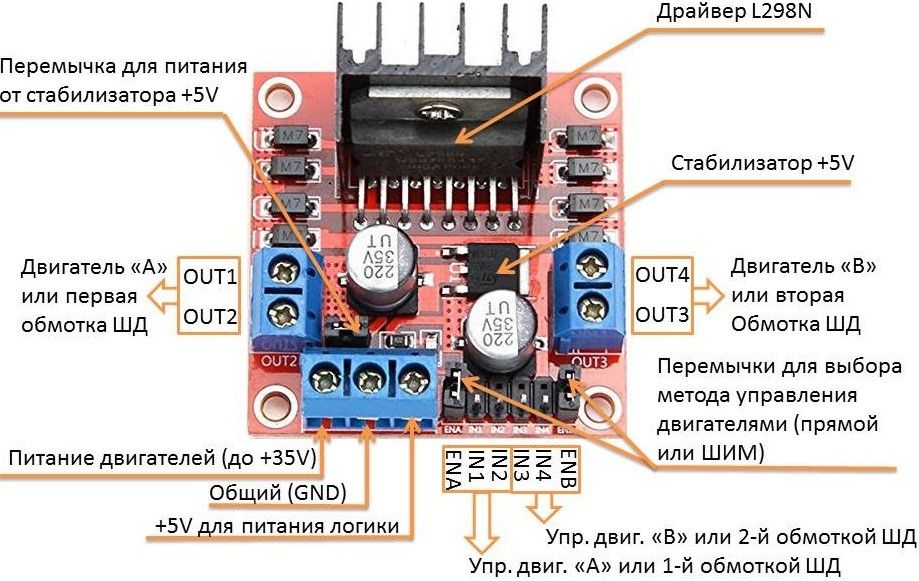
Рисунок №1 – внешний вид модуля L298N
- OUT1 и OUT2 – разъёмы для подключения первого щёточного двигателя или первой обмотки шагового двигателя;
- OUT3 и OUT4 – разъёмы для подключения второго щёточного двигателя или второй обмотки шагового двигателя;
- VSS – вход для питания двигателей (максимальный уровень +35V);
- GND – общий провод (не забываем соединить с аналогичным входом Arduino. );
- Vs – вход для питания логики +5V. Через него непосредственно запитывается сама микросхема L298N. Есть ещё второй способ питания, при котором 5V для L298N берётся от встроенного в модуль стабилизатора напряжения. В таком случае на разъём подаётся только питание для двигателей (Vss), контакт Vs остаётся не подключенным, а на плате устанавливается перемычка питания от стабилизатора, который ограничит питающее моторы напряжение до приемлемых 5V.
- IN1, IN2 – контакты управления первым щёточным двигателем или первой обмоткой шагового двигателя.
- IN3, IN4 – контакты управления вторым щёточным двигателем или второй обмоткой шагового двигателя.
- ENA, ENB – контакты для активации/деактивации первого и второго двигателей или соответствующих обмоток ШД. Подача логической единицы на эти контакты разрешает вращение двигателей, а логический ноль – запрещает. Для изменения скорости вращения щёточных моторов на эти контакты подаётся ШИМ-сигнал. Для работы с шаговым двигателям, как правило, на эти контакты ставят перемычки, обеспечивающие постоянную подтяжку к +5V.
На рисунке №2 показана электрическая схема модуля L298N.
Рисунок №2 – электрическая схема модуля L298N
Как видно из вышеприведенной схемы, основным элементом модуля является микросхема L298N, в состав которой входят два полноценных H-моста. Каждый H-мост выполнен в виде сборки из четырёх транзисторных ключей с включённой в центре нагрузкой в виде обмотки двигателя. Такой подход позволяет менять полярность в обмотке и как следствие направление вращения двигателя путём чередования пар открытых и закрытых ключей. Более наглядно этот процесс демонстрирует рисунок №3.
Рисунок №3 – транзисторные мосты Н-типа
На рисунке изображены два транзисторных моста Н-типа. В первом случае на вход IN1 подаётся логическая единица, а на вход IN2 – логический ноль. Так как транзисторы в схеме моста имеют разный тип проводимости, то при таком входном сигнале транзисторы Т1 и Т4 останутся в закрытом состоянии, в то время, как через транзисторы Т2 и Т3 потечёт ток. Ввиду того, что единственный путь протекания тока лежит через обмотку двигателя, то последний окажется подключен правой клеммой к плюсу питания, а левой к минусу. Всё это приведёт к вращению мотора в определённом направлении. Абсолютно противоположная картина показана на нижнем рисунке. Здесь IN3 установлен в логический ноль, а IN4 в логическую единицу. Теперь ток течёт в обратном направлении (левая клемма – плюс, правая – минус), заставляя второй двигатель крутиться в противоположную сторону.
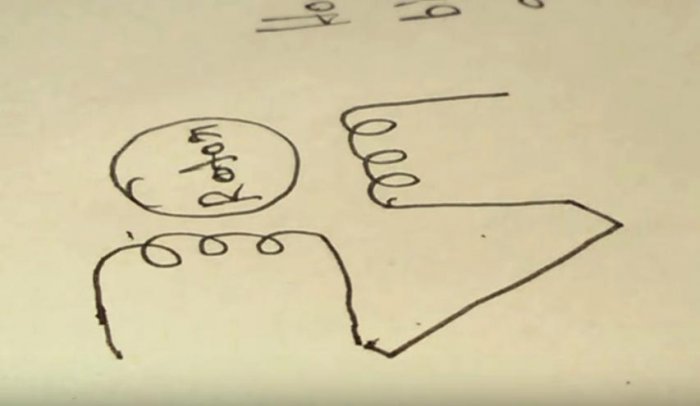
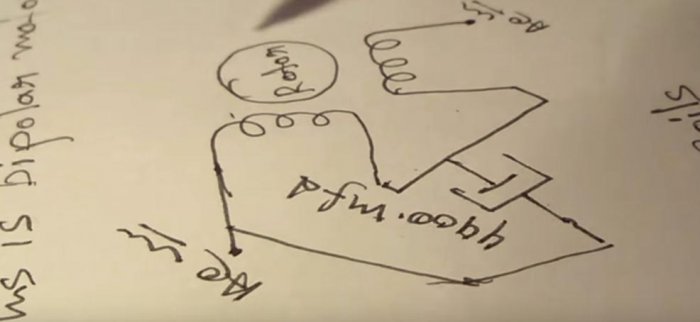
Схема шагового двигателя
Его схема обмоток выглядит примерно так:
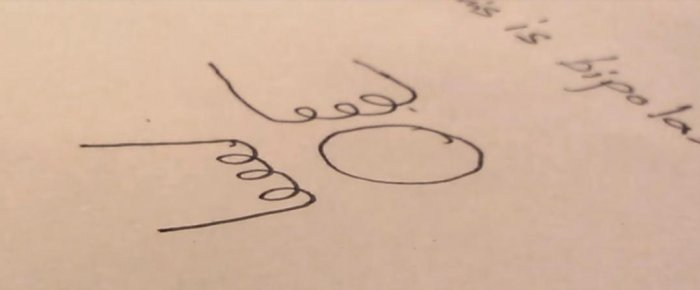
Очень похоже на схему обычного асинхронного двигателя.
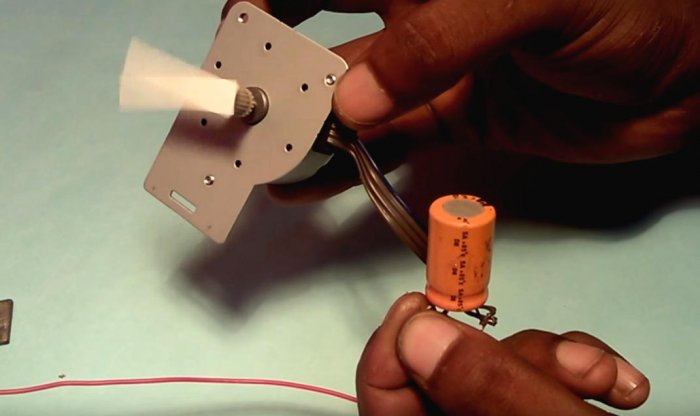
Для запуска понадобится:
- Конденсатор емкостью 470-3300 мкФ.
- Источник переменного тока 12 В.
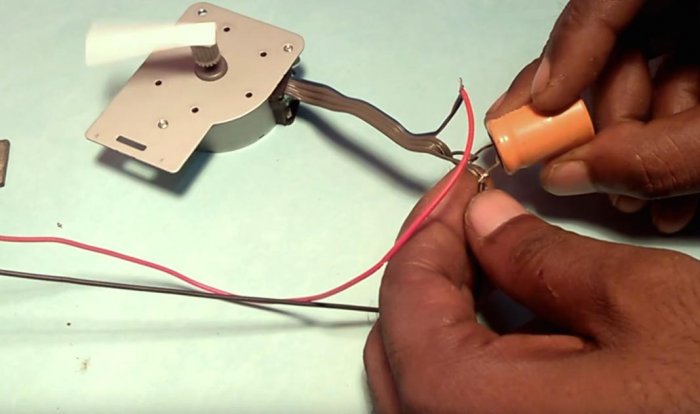
Замыкаем обмотки последовательно.
Середину проводов скручиваем и запаиваем.
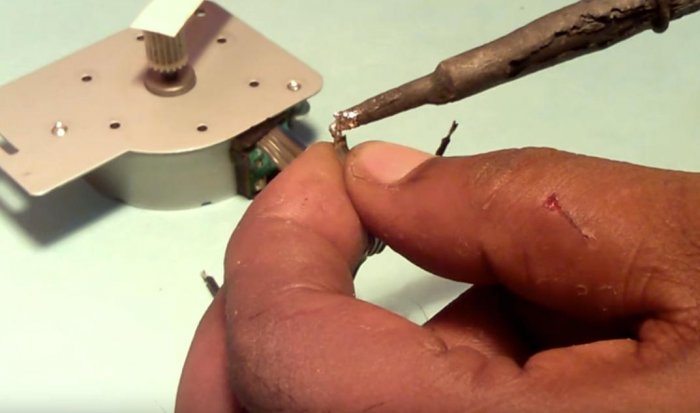
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом в источнику питания на любой выход. Фактически конденсатор будет параллелен одной из обмоток.

Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
Все предельно просто. А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Очень жалко то, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Применение
В электровелосипедах используются трёхфазные бесщёточные электродвигатели с датчиками Холла. Стоит отметить, что применение подобных трёхфазных двигателей достаточно обширно:
- Бытовая техника
- Оргтехника
- Электротранспорт
- Промышленность
Устройство двигателя
Для разработки контроллера необходимо разобраться с принципом работы самого электродвигателя.

Электродвигатель состоит из фазных обмоток, магнитов и датчиков Холла, отслеживающих положение вала двигателя.
Конструктивно электродвигатели делятся на два типа: инраннеры и аутраннеры.

У инраннеров магнитные пластины крепятся на вал, а обмотки располагаются на барабане (статоре), в этом случае в движение приводится вал. В случае аутраннера всё наоборот: на валу — фазные обмотки, а в барабане — магнитные пластины. Это приводит в движение барабан.

Так как у велосипеда колесо крепится валом на раму, то здесь применителен тип аутраннера.
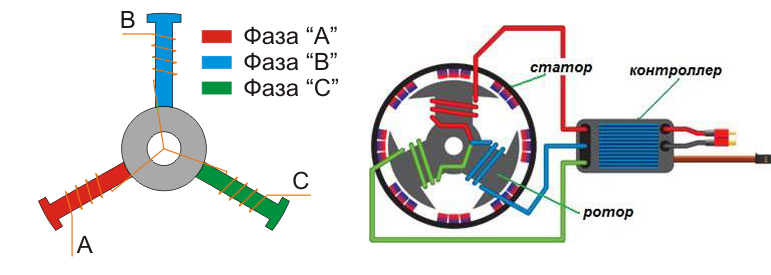
На этой картинке условно представлены три фазы с обмотками, соединёнными между собой. В реальности обмоток намного больше, они располагаются равномерно с чередованием по фазам по окружности двигателя. Чем больше обмоток — тем плавнее, чётче, эластичнее работает двигатель.
В двигатель устанавливаются три датчика Холла. Датчики реагируют на магнитное поле, тем самым определяя положение ротора относительно статора двигателя. Устанавливаются с интервалами в 60 или 120 электрических градусов. Эти градусы относятся к электрическому фазному обороту двигателя. Необходимо учитывать, что чем больше в двигателе обмоток на каждую фазу, тем больше происходит электрических оборотов за один физический оборот мотор-колеса.

Обмотки трёх фаз в большинстве случаев соединяются между собой по двум схемам: звезда и треугольник. В первом случае ток проходит от одной из фаз к другой, во втором — по всем трём фазам в разной степени. Иногда эти две схемы подключения комбинируют в одном двигателе, например в электромобилях. При старте и наборе скорости идёт соединение фаз по звезде: она даёт больший момент при относительно низких оборотах; далее, после набора скорости, происходит переключение на треугольник, в результате количество оборотов увеличивается, когда уже не нужен большой крутящий момент. По сути, получается условно автоматическая коробка передач электродвигателя.
Технические характеристики
- Напряжение питания логики: 5V;
- Потребляемый логикой ток: 36mA;
- Напряжение питания моторов: от 5V до 35V;
- Рабочий ток драйвера: 2 А;
- Пиковый ток драйвера 3 А;
- Максимальная мощность: 20 Вт (при температуре 75оС);
- Диапазон рабочих температур: -25оС…+135оС;
- Размеры модуля: 43.5 х 43.2 х 29.4 мм;
Управление скоростью двигателя с помощью ШИМ сигнала
Управлять скоростью двигателя можно снижая подачу тока. Для этого вместо постоянного сигнала (на порты PB0, PB1, PB2, PB3) подается сигнал ШИМ. Суть ШИМ сигнала состоит в том, что это не постоянный сигнал, а быстрое включение и выключение. При этом интервал выключения можно изменять и направлять больше или меньше тока двигателю. Чем больше интервал выключения, тем медленней двигатель будет крутиться. В микроконтроллере AVR существует 2 способа получения ШИМ сигнала – программный ШИМ и аппаратный ШИМ.
Программный ШИМ делается на отдельном контроллере просто записью в него программы, этот контроллер подключается к уже имеющемуся контроллеру и сигнал идет не напрямую от ATmega16 к IR2101, а через этот ШИМ контроллер. Такое можно сделать на более мелком контроллере, например, ATtiny2313, программа для ATtiny2313, которая превращает его в программный ШИМ контроллер, вот она, эта программа на языке AVR Assembler…