Шаговый двигатель от какого принтера
Запуск шагового двигателя без электроники
У любого радиолюбителя часто скапливается не мало различной оргтехники, которая вышла из строя. Выбрасывать я её ни кто не решается, так как из ее внутренностей можно сделать что ни будь полезное или выпаять некоторые детали. К примеру: шаговый двигатель, который так распространен, обычно используется любителями самоделок как мини генератор для фонарика или для чего то ещё. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Это и понятно: для управления шаговым двигателем нужна электроника и его просто так к напряжению не подключишь.
Но оказывается что данное мнение является ошибочным. Шаговый двигатель от принтера или от другого устрой устройства, можно легко запустить от переменного тока.
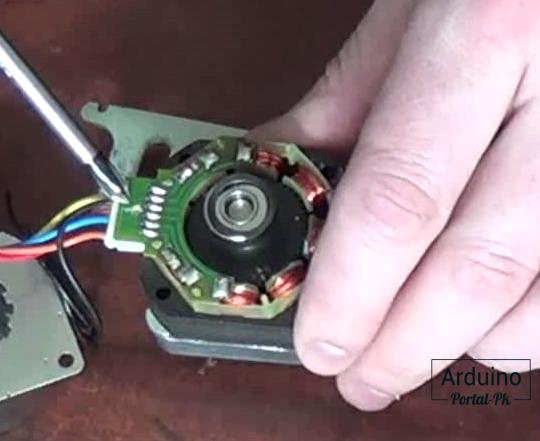
Для эксперимента использовался вот такой шаговый двигатель:
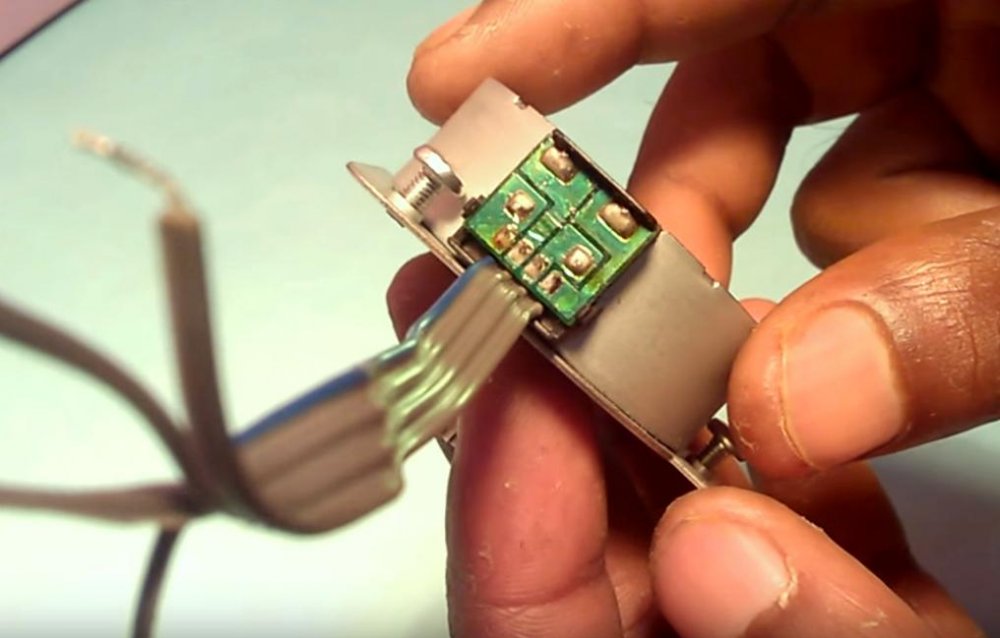
Обычно у них четыре вывода и две обмотки, в большинстве случаев, но есть и другие конечно. В данном случае будет рассмотрен самый ходовой двигатель.
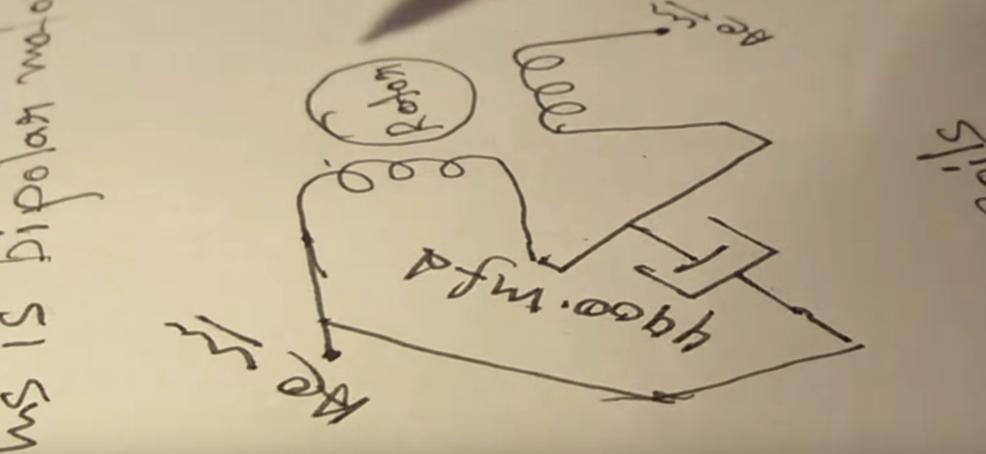
Схема шагового двигателя
Схема обмоток данного двигателя выглядит вот так:
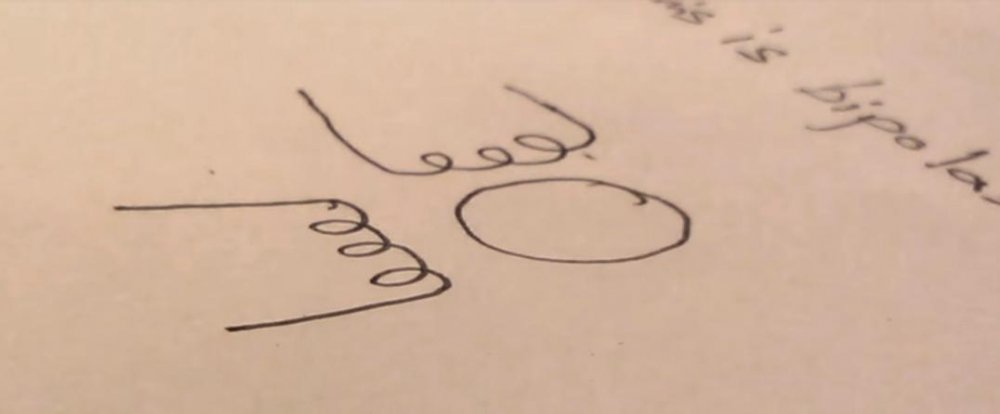
Она очень похожа на схему обычного асинхронного двигателя.
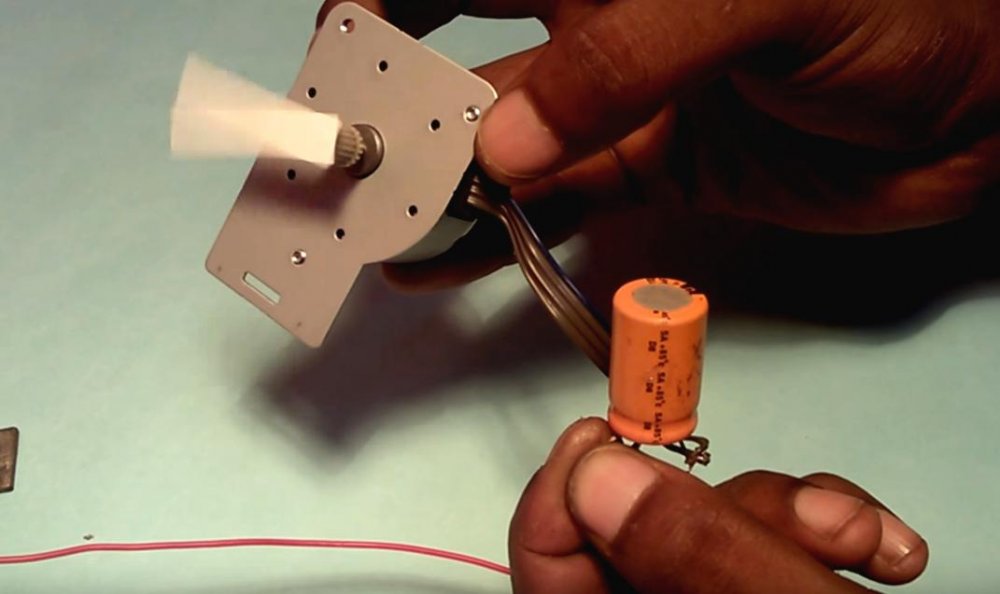
Для запуска двигателя понадобится:
- Электролитический конденсатор 470-3300 мкФ.
- Источник переменного тока 12 Вольт.
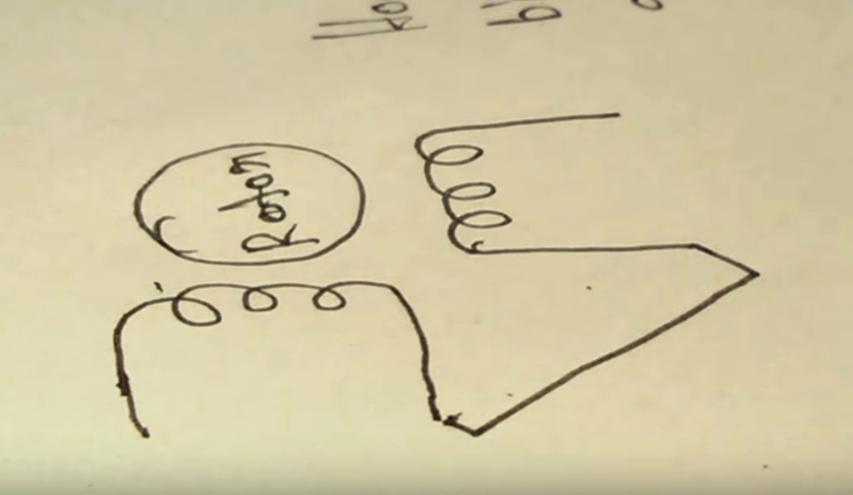
Замыкаем обмотки последовательно, как на схеме ниже.
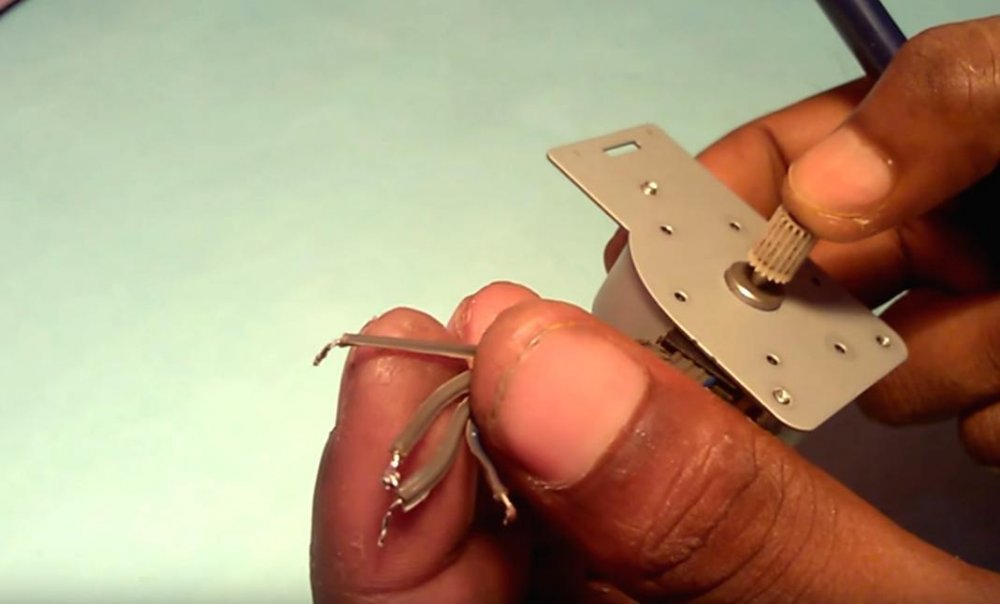
Середину проводов нужно скрутить и спаять.
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом к источнику питания на любой контакт. Фактически электролитический конденсатор будет параллелен одной из обмоток.

Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
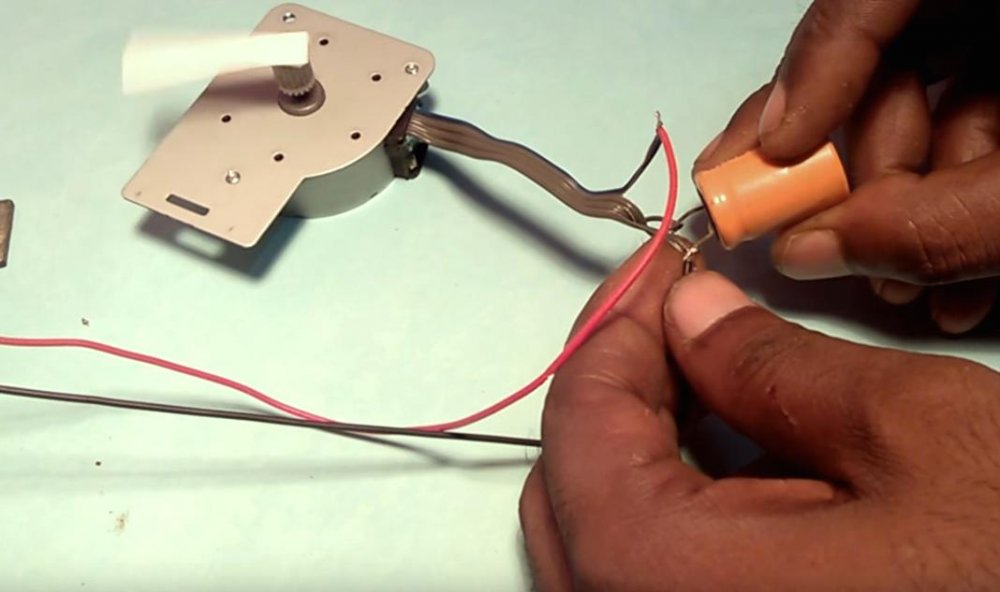
Все достаточно просто. Принцип работы этой схемы очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Единственные минус заключается в том, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Сморите видео
Схемы управления шаговыми двигателями
Схемы управления шаговыми двигателями
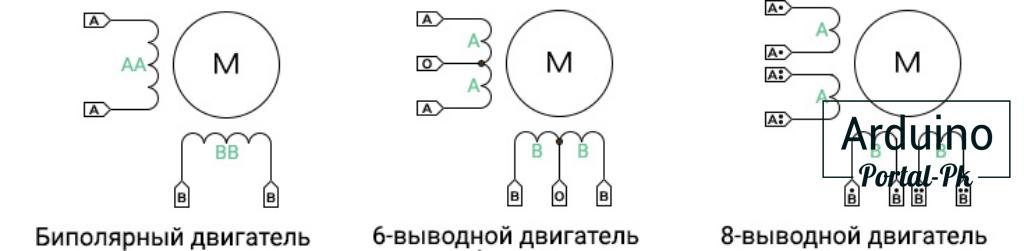
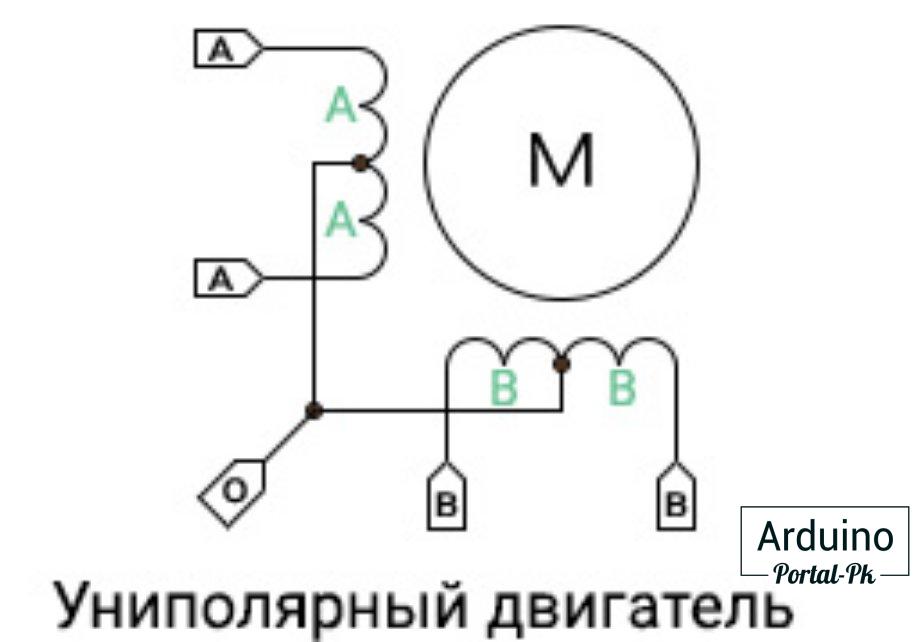
Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками (4 вывода), с двумя обмоткми и центральными отводами (6 либо 5 выводов) и с четырьмя обмотками (8-ми выводные ШД). Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер (т. е. переключать направление магнитного поля, создаваемого обмотками двигателя переполюсовкой половин обмоток двигателя). Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности.
Однако большинство драйверов предназначено для управления биполярными двигателями. При тех же габаритах биполярный шаговый двигатель обеспечивает больший момент по сравнению с униполярным. Поэтому наибольший практический интерес у новичков вызывает именно схема управления биполярным шаговым двигателем.
Постараемся разабраться, каким образом можно подключить 6-ти или 8-ми выводной мотор к биполярной схеме управления и как при этом изменяются электрические характеристики двигателя?
Как подобрать шаговый двигатель для станка ЧПУ. ШД из принтера.

Любая разработка начинается с выбора компонентов. При разработке ЧПУ станка очень важно правильно подобрать шаговые двигателя . Если у вас есть деньги на покупку новых двигателей, в таком случае нужно определить рабочее напряжения и мощность двигателя. Я купил себе для второго ЧПУ станка шаговые двигателя вот такие: Nema17 1.7 А.
Если у вас нет достаточно денег или вы просто пробуете свои силы в данной сфере. То вы скорее всего будите использовать двигателя из принтеров . Это самый недорогой вариант. Но тут Вы столкнетесь с рядом проблем. У двигателя может быть 4, 5, 6, 8 — проводов для подключения. Как их подключить к драйверам L298n и СNC shield.
Давайте разберемся по порядку. Какие шаговые двигателя бывают. Если вы видите четное количество выводов это биполярный шаговый двигатель . Расположение обмотки для данного двигателя вот такое.
Если у двигателя 5 выводов, это униполярный шаговый двигатель . Вот так выгладит его схема.
Наши драйвера рассчитаны на двигателя с 4 выводами . Как быть? Как их подключить?
Биполярные ШД с 6-ю выводами подключаются к драйверу двумя способами:
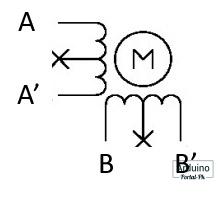
В данном случае ШД имеет момент в 1.4 раза больше. Момент более стабилен на низких частотах.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность ШД — I*2 * R
При последовательном включении обмоток потребляемая мощность становится Iпосл.*2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому I*2 * R = Iпосл.*2 * 2* R, откуда
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
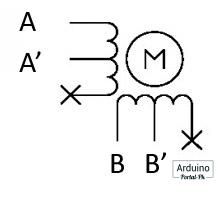
Во втором случае момент более стабилен на высоких частотах. Параметры ШД при таком подключении соответствуют заявленным в datasheet, (момент, ток), момент более стабилен на высоких частотах .
Униполярный шаговый двигатель можно переделать.
Для этого нужно разобрать шаговый двигатель и перерезать провод соединяющий центр обмоток. И при подключении общий провод подключать ни куда не нужно.
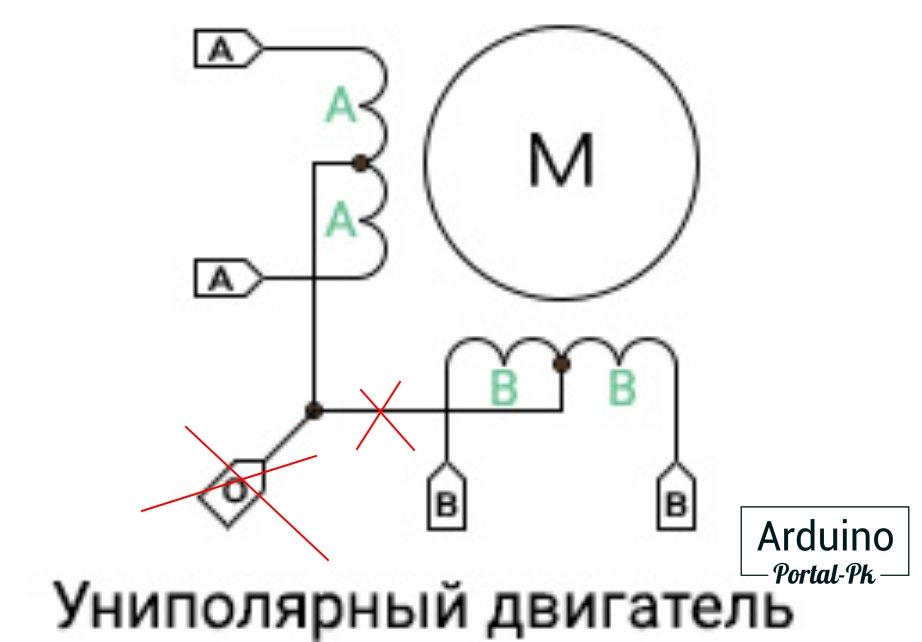
В итоге у нас получается биполярный двигатель с 4 выводами.
Шаговые двигателя с 8-ю выводами можно подключить тремя способами.
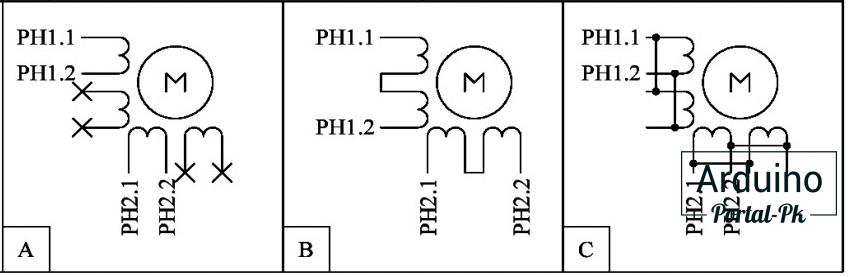
Подключение А — шаговик работает с характеристиками, заявленными в описании (момент, ток), момент более стабилен на высоких частотах.
Подключение B – момент ↑1.4 раза, момент более стабилен на низких частотах (относительно А).
Подключение C – момент ↑1.96 раза, момент более стабилен на высоких частотах (относительно А).
Вот мы и решили проблему подключения шаговых двигателей. Но не все двигателя у нас заработают. Нужно еще определить рабочее напряжение двигателей. Самый правильный способ это найти datasheet. Так все параметры есть. Но не ко все двигателя из принтера можно найти datasheet. В таких случаях я пользуюсь вот такой таблицой .
Сопротивление обмотки, Ом
Рабочее напряжение, В
Не знаю на сколько данная таблица верная но у меня все сходиться и работает как надо.
Двигателя я выбираю чтобы рабочее напряжение было меньше или равно напряжению источника питания. Для двигателей рассчитанных на меньшее напряжения необходимо настроить ток ниже.
Настраивать СNC shield будем в следующей статье. Не пропустите!
Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.
Спасибо за внимание!
Понравилась статья? Поделитесь ею с друзьями:
Цветовая маркировка проводов-выводов обмоток
Цвета проводов шаговых двигателей достаточно вольно стандартизованы.
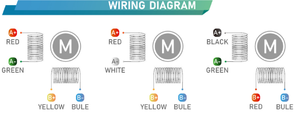
Однако производители «вывешивают» на своих сайтах подобные изображения с целью указания того, какие именно цвета проводов используются в каких случаях. Данная картинка не является полным и законченным пособием ибо требует проверки и в каждом конкретном случае лучше свериться с каталогом производителя.
ЗD-принтер из вторичных комплектующих








Несмотря на вторичные детали мастер хотел сделать хороший аппарат, способный выполнять качественную ЗD печать. Поэтому ему пришлось купить некоторые детали, например подшипники.
Мастер разработал все детали, кроме экструдера Боудена ( от Schlotzz ) и зажима для линейных подшипников ( от Dagoma ).
Как видно на картинке, первый пользователь — сын мастера. На первом фото вы можете увидеть все, что печатает машина, включая неудачные модели. Аппарат может печатать с разрешением 0,15 мм, а длительность печати — 3 часа.
Теперь перейдем к списку материалов, в котором мастер указывает откуда была извлечена та, или иная деталь.
Инструменты и материалы:
-2 шаговых двигателя nema 17 с ремнями и болтами для оси XY из принтера Espon C20;
-1 шаговый двигатель nema 17 с болтами для оси z из принтера Epson C20;
-1 шаговый двигатель nema 17;
— Соединительная муфта 4х6;
— 608zz подшипник;
-623zz подшипники — 16шт (мастер недавно нашел их в охлаждающих вентиляторах сервера);
— LM8uu линейные подшипники 8 шт;
-Пневматический разъем быстросъемный PC4;
—-Зубчатая насадка на вал экструдера;
-Термоблок;
-Комплект Arduino мега для 3D-принтера;
-12V 5A блок питания (мастер использует БП компьютера);
-Штекер 12В;
-USB-кабели;
-2шт DVD привода;
-Концевой выключатель;
-8-миллиметровые линейные валы;
-6 мм резьбовой стержень;
-Винты, болты и гайки (М2, М3, М4 и М6);
-Пружины (встречаются в принтере, машинах);
-МДФ или фанеры;
-Оргстекло;
-12 мм гибкая труба (можно использовать ПВХ);
-Электролобзик;
-Отвертка;
-Циркулярная пила;
-Нож;
-Слесарные ключи;
-Дрель;
-Краска;
-3D-принтер;
-Термоусадочная трубка;
-Паяльные принадлежности;
-Алюминиевая пластина;










Ниже можно скачать PDF-файл с чертежом корпуса.
Greencore templates.pdf
Шаг второй: стержни
Нужно несколько гладких и несколько резьбовых стержней. Валы 6 и 8 мм мастер достал из старого факса. Стержень 3 мм извлек из привода DVD.
Линейный вал диаметром 8 мм:
225 мм (ось X) — 2 шт.
180 мм (ось Z) — 2 шт.
200 мм (ось Y) — 2шт.
Резьбовой стержень диаметром 6 мм:
135 мм (ось Z) — 1 шт.
Линейный стержень диаметром 3 мм:
30 мм (для петель) 2 шт.


Шаг третий: 3D-печать
Для изготовления нескольких деталей нужен доступ к 3D-принтеру. Для печати деталей мастер использовал свой 3D-принтер Discoeasy200 с зелеными и черными PLA- нитями Gracious от ICE и PLA-нитями White Chromatik от Dagoma. Проекту нужно 220 г нити.
Настройки печати:
Поддержки: нет
Разрешение: 0,2 мм
Заполнение: 20%
Накаливания: PLA


Шаг четвертый: шаговые двигатели
Для своего проекта мастер использовал 3 шаговых двигателя, отработавших на старых принтерах Epson C20. Как правило, принтеры выбрасываются в мусорное ведро, поскольку печатающие головки забиты, однако все остальные детали аппарата работают хорошо. Можно снять со старой техники шаговый двигатель, гайки и болты M3, ремень, линейный вал, пружины, кнопки. В старых принтерах Epson стоят шаговые двигатели nema 17, если вам нужны более мощные моторы, обратите внимание на технику Ricoh.
Для подготовки двигателей понадобятся разъемы Dupont, старые USB-кабели и паяльные принадлежности. Для данного проекта нужны два двигателя с приводным шкивом и один без.
Длина провода:
Двигатель передний правый (со шкивом): 73 см
Шаговый двигатель передний левый (со шкивом): 50 см
Двигатель без шкива: 23 см







































Шаг одиннадцатый: Arduino Mega и Ramps 1.4
Мастер выбрал эти два элемента, потому что они дешевы и хорошо известны. Для управления шаговыми двигателями мастер использует драйвер А4988.
После подключения проверяет работу двигателей. Включает принтер и переходит к ручным настройкам.
Проверяет работу двигателей вправо и влево. Если двигатели крутятся неправильно, нужно поменять местами провода. Все должно быть настроено согласно рисункам.
3Д БУМ
3Д принтеры и всё что с ними связано
3d принтер из старых МФУ
Идея ничего не стоит — но стоит её реализация!
Пока кто-то только подает идеи, ниже разработчик с головой молча всё делает! (хотя не совсем молча — просто идеально еще и описывает свои действия!), источник: http://eca3d.blogspot.ru
Ценное содержимое лазерных МФУ
Когда появляется возможность разобрать какой-нибудь старый аппарат, обычно глаза разбегаются. Только потом, с годами начинаешь осознавать, что многое из него никогда не понадобится, и будет вечно пылиться, пока не надоест. Важно знать что на самом деле пригодиться, а что только захламит мастерскую. Мне посчастливилось утилизировать партию лазерных МФУ Xerox 4118 и Xerox M15. Эти аппараты очень хорошо оснащены и довольно избыточны в плане набора деталей.
Перечень всех донорских комплектующих, использованных при изготовлении самодельного 3D принтера:
1) Стальные направляющие — 6 штук.
2) Пластиковые подшипники скольжения — 3 штуки.
3) MXL зубчатая лента — 3 штуки.
4) Железные профили — 13 штук.
5) Шаговые двигатели: — 2 мотора, поддерживающие микрошаг, — 2 мощных мотора без микрошага.
6) Драйвер шагового двигателя A3977 – 1 штука. Драйвер выпилен из печатной платы МФУ, минимальный микрошаг — 1/8. Поскольку применены двигатели с числом полных шагов 96, я предпочел докупить 3 драйвера A4988. A4988 поддерживает дробление на микрошаг 1/16, поэтому лучше подходит по точности позиционирования. Можно еще сэкономить, и выпилить дополнительные 3 штуки A3977.
7) Термистор печки.
8) 3 оптических датчика.
9) Соединительные провода с ферритовыми кольцами.
10) Качественный блок питания 24 в и 5В.
11) Пластиковые детали, применяемые в качестве ножек опоры конструкции.
Итого для сборки 3D принтера понадобилось 7 МФУ Xerox 4118 и Xerox M15.
Позднее добавлю фотографии.
Самодельный 3D принтер из старых аппаратов
У каждого инженера при создании какого-нибудь нового устройства почти наверняка встает вопрос о поиске той или иной оптимальной детали, корпуса, шестеренки и т. д. Соответственно он начинает откладывать и копить на будущее всякую мелочевку, винтики – болтики, коробочки, ну просто все подряд. Часто выкинешь какую-либо штуковинку, а оказывается что именно она наилучшим образом подошла бы в новом творении. А поздно, уже выкинул. Приходится подгонять самоделку под имеющееся.
Окружающее пространство вокруг “изобретателя” представляет собой по сути своеобразную hi-tech помойку. Посмотрите в интернете фон на фотографиях из домашних мастерских – у подавляющего большинства на заднем плане разнообразный хаос. Также и у меня. В конце концов необходимость минимизировать желание откладывать “про запас”, вынудили более серьезно отнестись к возможности изготовления домашнего 3D принтера. Возможность оперативно напечатать нужную деталь, а не хранить её годами, занимая драгоценное место, незаменима. Целый год я лишь присматривался, не предпринимая никаких шагов к изготовлению такого аппарата. В основном останавливала необходимость рутинного поиска специфичных комплектующих, заказа их по почте и связанное с этим долгое ожидание. Но самое главное – в цене. Минимальная стоимость всего набора превышала 350$. С целью минимизировать затраты, при проектировании аппарата постарался по максимуму использовать имеющееся детали из своих запасов, а также части старых принтеров.
Описанное сделано по концепции принтеров Reprap Mendel Prusa. Фактически получилась очередная вариация Repstrap.
Для рамы использовал укрепляющие металлические профили от отслуживших свое Xerox 4118:
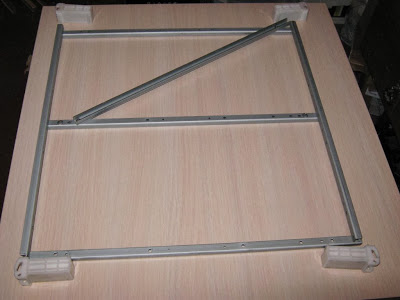
Они очень хорошо подошли по размерам и имеют несколько симметричных штампованных отверстий.
Благодаря заводскому изготовлению крепежных мест, раму получиться сделать ровнее, чем если самому сверлить. Когда сам сверлишь, особенно если торопишься, почти наверняка будут ошибки. А тут уже все готовое. В дальнейшем все размеры принтера подгонял по этим профилям и готовым отверстиям.


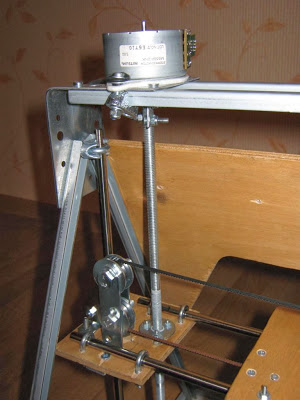
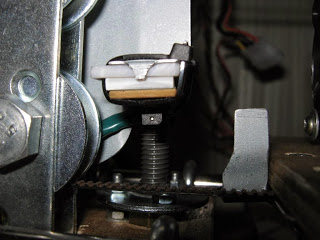
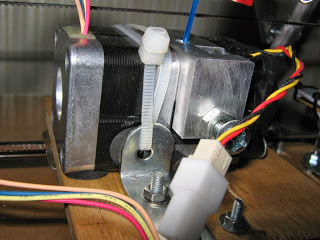
Для фундамента двигателей оси Z приобрел в ближайшем крепежном магазине два увесистых металлических уголка:

Крепление направляющих оси Z. 
В интернете начитался про повышенную шумность 3D принтеров, поэтому сразу решил делать его тихим. Двигатели Z лежат на фетровой прокладке, она очень хорошо изолирует звуковые колебания. На практике оказалось что перемещения по оси Z происходят значительно реже чем по X и Y, поэтому её можно было и не звукоизолировать. В обычных старых 2D принтерах моторы довольно слабые и не поддерживают микрошаг, поэтому довольно долго искал подходящие. Пришлось пойти на компромисс: на ось Z поставил помощнее, но полношаговые, а на X и Y слабые, но поддерживающие микрошаг.


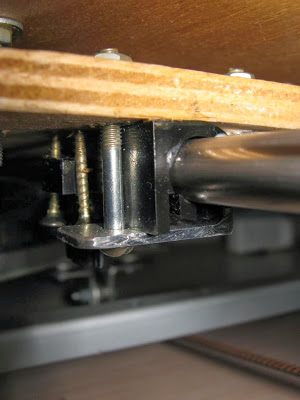
Крепление оси Y:

Фактически эти оси является частью рамы и участвуют в усилении жесткости конструкции. Сильно затягивать крепежные гайки еще рано, т. к. необходимо обеспечить их параллельность, а это лучше проверять, уже имея перемещаемый стол Y.
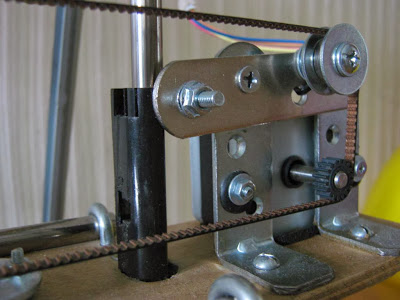
Привод оси Y:


Линейный пластиковый подшипник, применяемый на всех осях: 

С осью X пришлось повозиться дольше чем я ожидал. Придумывание концепции механизмов оказалось соизмеримо с длительностью их реализации, и заняло довольно продолжительное время.

Для уменьшения вибраций и производимого принтером шума, двигатели X и Y также установлены через виброгасящие прокладки. 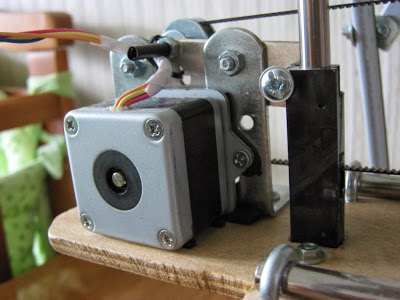

Основа стола, каретка X и пластина поперечной устойчивости — из 6 мм фанеры:

.JPG)

Оптические концевые датчики. На шпильке видна силиконовая смазка. 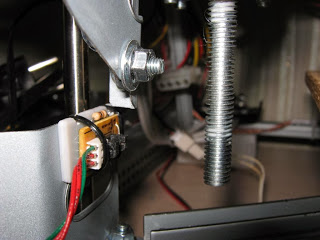
Заказанный экструдер пришел не с тем мотором, который был обещан продавцом, и, вдобавок с кривой головкой. Пришлось его переделывать. Головку выровнял и добавил прижимную пружину на подачу пластика. Заодно вернул себе часть денег за покупку.
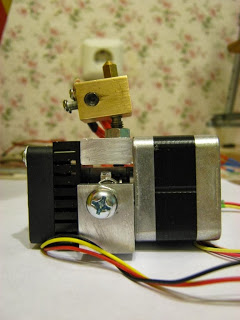
Обычно креплению катушки с пластиком уделяют не много внимания, но мне кажется удачная конструкция уменьшит нагрузку на двигатель экструдера и оси X.

Катушка вращается на подшипниках, и ориентирована продольной плоскостью на печатающую головку. Для исключения самопроизвольного разматывания, подшипники меньшего размера чем отверстие на бобине. Смонтировал и подключил электронику: Arduino, RAMPS, microSD, драйверы шаговиков (a4988), и т. д.
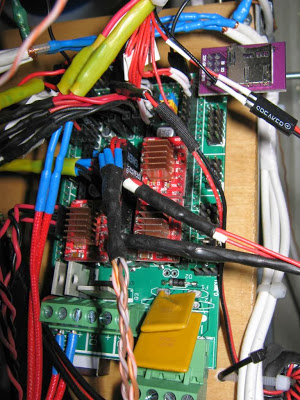
Обратите внимание на драйвер Z двигателей:

Поскольку двигатели довольно слабые, пришлось использовать их на максимуме тока. Для этого просто выпилил из печатной платы разобранного МФУ уже готовый, распаянный более мощный драйвер a3977. 🙂 Очень удобно!
Помучился с графическим LCD, прежде чем понял что прошивка Marlin работает с ним не по параллельному, а по последовательному интерфейсу.

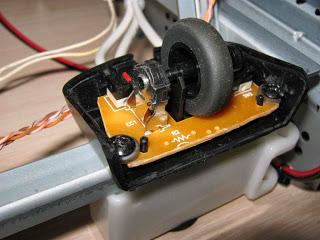
Из старой мышки получился пульт:
Испытания шаговиков показали, что если сопротивление их обмоток от 6 Ом, они значительно лучше, мощнее и тише работают от 24 вольт.
На экструдере наоборот. Там оказался низкоомный мотор 3 Ом, который при 24 вольт стал шуметь и очень сильно греться. Пришлось его, и резистор головки запитать от 12V. Блок питания от XEROX:

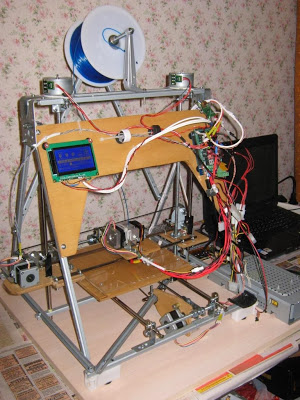
Ну вот и все. Готовый аппарат в первой итерации:
.JPG)
Словами не описать ощущения, которые испытываешь перед первым включением изготовленного аппарата :-). Особенно когда до завершения изготовления остается всего несколько часов.
А вот и печать:
Сразу заметно, что усилия по звукоизоляции принесли свои плоды. Принтер очень тихий. По громкости он заметно тише чем некоторые струйные принтеры. Даже на записи окружающий фон громче работающего принтера. Скорость печати от 30 до 40мм.
Раньше я увлекался разгонами процессоров, а что если разогнать принтер. Скорость 80мм:
При дальнейшем увеличении скорости до 120мм, печать идет, но очень ощущается резонанс. Ограничусь для скоростной печати скоростью 80мм, а для качественной 50мм. Отлично, я доволен результатом разгона.
И напоследок несколько распечатанных предметов (файлы скачаны с http://www. thingiverse. com/):

 Добавка распечатки пассатижей:
Добавка распечатки пассатижей:
 И на обороте, чтоб защелки попробовать увидеть:
И на обороте, чтоб защелки попробовать увидеть:

Т. к. сразу наметились пути модернизации и исправлений, испытания первого варианта принтера завершаю. В дальнейшем обдумаю различные варианты повышения быстродействия с сохранением качества печати, в частности произведу замену экструдера.
30.11.2013г.
Еремин Сергей, г. Владимир.
Автор: Sergey Eremin