Mosfet управление двигателями постоянного тока схема
Управление возбуждением двигателей постоянного тока
Управление двигателями постоянного тока
По способу возбуждения двигатели постоянного тока подразделяются аналогично генераторам на двигатели независимого (рис.1), параллельного (рис.2), последовательного (рис.3) и смешанного (рис.4) возбуждения. При параллельном, последовательном и смешанном возбуждении напряжение на обмотке возбуждения зависит от напряжения на обмотке якоря, при независимой системе возбуждения, обмотка возбуждения питается от дополнительного источника постоянного тока и не зависит от режима работы и нагрузки двигателя.
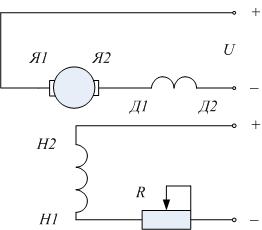 Рис.1 Схема независимого возбуждения
Рис.1 Схема независимого возбуждения
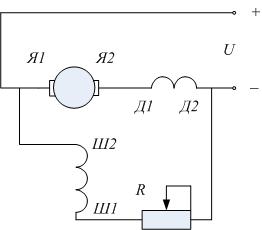 Рис.2 Схема параллельного возбуждения
Рис.2 Схема параллельного возбуждения
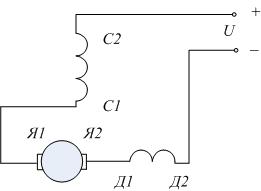 Рис.3 Схема последовательного возбуждения
Рис.3 Схема последовательного возбуждения
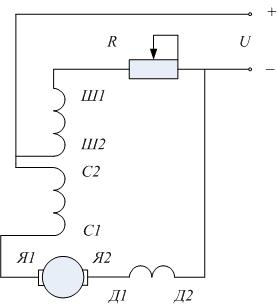 Рис.4 Схема смешанного возбуждения
Рис.4 Схема смешанного возбуждения
Для регулирования скорости двигателей постоянного тока применяют различные способы.
В общем случае скорость двигателя определяется выражением:

Как видно из выражения (1.1), регулировать скорость двигателя постоянного тока возможно двумя способами:
— Изменением питающего напряжения U
— Изменением магнитного потока машины Ф (изменением тока возбуждения)
Раньше регулирование питающего напряжения встречало трудности связанные с преобразованием напряжения постоянного тока, изменение скорости вращения двигателя осуществлялось с помощью включения в цепь якоря дополнительного регулировочного реостата. Основными недостатками этого метода являются потери в реостате, через который протекает ток полной нагрузки двигателя, неудобство управления.
Наиболее удобным, распространенным и экономичным способом регулирования скорости вращения двигателя постоянного тока, является изменение магнитного потока машины (изменение тока возбуждения). Экономия связана с тем, что в данном случае управлять можно не большим током якоря, а малым током возбуждения, что уменьшает потери и удешевляет систему управления. Однако этот способ позволяет лишь увеличивать скорость вращения двигателя.
Согласно выражению (1.1), с уменьшением Ф скорость возрастает (рис.5). Двигатели рассчитываются для работы при номинальном режиме с наибольшим значением Ф, т. е. с наименьшей величиной n. При таком регулировании к. п. д. двигателя остается высоким, так как мощность возбуждения мала, и потери при регулировании минимальны. Максимальная скорость вращения в данном случае ограничивается механической прочностью машины и условиями ее коммутации.
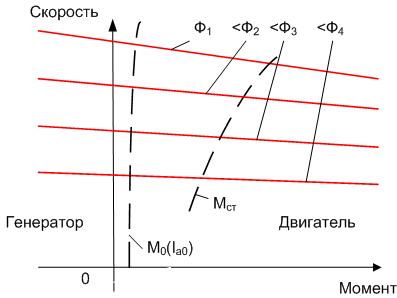
Рис.5 Характеристики ДПТ при регулировании тока возбуждения
Современные способы регулирования скорости двигателей постоянного тока
Сегодня основным средством управления двигателями постоянного тока становятся современные тиристорные регуляторы (назовем их “приводы постоянного тока”), их производят множество фирм, специализирующихся на приводной технике (например, Control Techniques, Siemens, Sprint-Electric и т.д.). Современные приводы постоянного тока позволяют управлять не только скоростью вращения двигателя, но и его моментом (например, на линиях намотки). За счет различных интерфейсов обмена сигналами с автоматизированной системой управления, изменять параметры работы двигателя достаточно просто и удобно.
Приводы постоянного тока могут работать как в одном квадранте, так и во всех четырех, при этом изменяя не только ток обмотки якоря, но и ток обмотки возбуждения — многие приводы имеют встроенные “контроллеры поля”, что дает возможность регулировать скорость двигателя в самом широком диапазоне.
Следует отметить, что “ослабление” поля при задании скорости двигателя выше номинальной, привод производит автоматически, контроллер поля представляет собой тот же тиристорный регулятор. Встроенные контроллеры поля имеют приводы Mentor, Mentor MP (Control Techniques), PL, PLX (Sprint-Electric). Остальные модели приводов постоянного тока этих брендов для питания обмотки возбуждения двигателей имеют неуправляемые выпрямители.
Номинальный ток контроллеров возбуждения приводов постоянного тока имеют следующие значения:
Sprint-Electric PL, PLX — 8A (для приводов с номинальным током якоря 12-123A), 16A (для приводов с номинальным током якоря 155-330A), 32A (для приводов с номинальным током якоря 430-630A).
Control Techniques Mentor — M25(R) — M210(R) — 8 А, остальные габариты с неуправляемым выпрямителем.
Control Techniques Mentor MP —
MP25Ax(R), MP45Ax(R), MP75Ax(R), MP105Ax(R), MP155Ax(R), MP210Ax(R) — 8А
MP350Ax(R), MP420Ax(R), MP550Ax(R), MP700Ax(R), MP825Ax(R), MP900Ax(R) — 10A
MP1200Ax(R), MP1850Ax(R) — 20А.
Для токов обмотки возбуждения имеющих значение свыше 8А, Control Techniques предлагает внешние контроллеры поля, которые связываются с приводом постоянного тока по цифровой шине — это контроллеры FXM-5 (до 90А) и FXMP-25 (до 25А).
На практике часто встречаются двигатели с низковольтными обмотками возбуждения с большими токами. В данном случае, для изменения тока можно применить приводы постоянного тока, при этом вместо обмотки якоря подключить обмотку возбуждения. Это может быть любой аналоговый или цифровой привод постоянного тока. При использовании в качестве регуляторов поля простых аналоговых преобразователей Sprint-Electric (модели 340, 680, 1220, 340i, 680i, 1220i, 370, 370E, 400E, 800E, 1200E, 400, 800, 1200, 400i, 1600i, 3200i, SL, SLE), производитель рекомендует настраивать их в режим управления моментом.
Привод Mentor MP (Control Techniques) имеет для этого специальный режим.
Mosfet управление двигателями постоянного тока схема
В связи с развитием полупроводниковой техники все шире применяется импульсное управление исполнительным двигателем. Суть его заключается в том, что частоту вращения двигателя регулируют не величиной постоянно подводимого напряжения, а длительностью питания двигателя номинальным напряжением. Одна из возможных схем импульсного управления приведена на рис. 2.7,а. Там же (рис. 2.7,б) показаны графики скорости при различных t.
В период, когда электронный ключ открыт, питающее напряжение полностью подается на двигатель, ток якоря увеличивается, двигатель развивает положительный момент и частота вращения возрастает; когда электронный ключ закрыт, ток под действием запаса электромагнитной энергии продолжает протекать в том же направлении но через обратный диод. При этом он уменьшается, момент двигателя уменьшается, угловая скорость вращения падает.

Рис. 2.7. Схема импульсного управления (а), графики скорости вращения (б) при разных τ. (τ2 > τ1)
Работа двигателя состоит из чередующихся периодов разгона и торможения. И, если эти периоды малы по сравнению с электромагнитной постоянной времени якорной цепи Тэм.а, устанавливается некая средняя скорость, однозначно определяемая относительной продолжительностью включения (скважностью) t = tи/T, где tи — длительность импульса напряжения; T — период.
Частота управляющих импульсов составляет 200-400 Гц, в результате период  управления Т оказывается на 2 порядка меньше электромагнитной постоянной времени обмотки якоря
управления Т оказывается на 2 порядка меньше электромагнитной постоянной времени обмотки якоря
Управление, при котором изменяется соотношение длительности импульса tи и паузы tп при постоянном периоде Т, называется широтно-импульсным.
Если параметры схемы подобраны так, что колебания тока, момента и угловой скорости вращения небольшие, работа двигателя практически не отличается от работы при постоянном напряжении, за которое можно принять среднее напряжение за период управления Т: Uср = Uномtи/T = tUном.
 Оперируя средними значениями, получим уравнение, аналогичное (2.4), поскольку в данном случае мы имеем якорное управление
Оперируя средними значениями, получим уравнение, аналогичное (2.4), поскольку в данном случае мы имеем якорное управление
На рис. 2.8,а показаны графики тока сети (Ic) и тока якоря (Ia) при относительно больших нагрузках. При малых нагрузках ток двигателя становится небольшим и появляются периоды, когда при закрытом электронном ключе ток якоря уменьшается до нуля. Говорят, наступил режим прерывистых токов (рис.2.8,б). Механические характеристики приобретают перелом и становятся похожими на характеристики двигателя при регулировании реостатом в цепи якоря. В общем случае они имеют вид, представленный на рис. 2.9. Зона, соответствующая прерывистым токам, ограничена пунктирной линией. Критическая относительная частота вращения, при которой наступает перелом, равна


Рис. 2.8. Графики тока сети Ic и тока якоря Ia при больших нагрузках (а) и тока якоря при малых нагрузках (б)
Основное преимущество импульсного управления заключается в уменьшении средней потребляемой мощности за счет уменьшения среднего тока.
§ 2.4. Динамические характеристики исполнительных двигателей постоянного тока
Механические характеристики исполнительных двигателей постоянного тока линейные, поэтому для них выражение электромеханической постоянной времени будет иметь известный вид (1.11).
При якорном управлении характеристики параллельные, т.е. пусковой момент и угловая скорость холостого хода изменяются пропорционально коэффициенту сигнала: Мп = aМб, w = awб. В этом случае постоянная времени, а следовательно и быстродействие, не зависят от коэффициента сигнала.
При полюсном управлении пусковой момент прямо- а угловая частота вращения холостого хода обратно пропорциональны коэффициенту сигнала: Мп = aМб, w= wб/a. Постоянная времени будет Тм = Jwб/Мбa 2 . Видно, что при полюсном управлении быстродействие в сильной степени зависит от коэффициента сигнала, ухудшаясь с его уменьшением.
§ 2.5. Конструкции исполнительных двигателей постоянного тока
По конструкции исполнительные двигатели можно разделить на двигатели с ферромагнитным якорем и малоинерционные, не имеющие ферромагнитного сердечника якоря.
Двигатели с ферромагнитным якорем и обмоткой возбуждения отличаются от обычных машин лишь тем, что имеют полностью шихтованную магнитную систему (якорь, полюса, станину), что продиктовано стремлением уменьшить потери в стали и увеличить быстродействие в переходных режимах. Это двигатели серий СЛ, МИ, ПБС и др. Есть двигатели (серии ДП и ДПМ), в которых роль обмотки возбуждения выполняют постоянные магниты. В остальном они ничем не отличаются от названных выше.
Существуют двигатели, например серии МИГ, в которых обмотка якоря располагается не в пазах (их нет), а непосредственно на поверхности якоря, закрепляясь на ней с помощью специального клея и бандажей. «Беспазовое» исполнение обмотки значительно уменьшает ее индуктивность, улучшает коммутацию и увеличивает быстродействие. Недостатком гладкого якоря является большой немагнитный промежуток между ним и полюсом, что увеличивает размеры обмотки возбуждения.
Малоинерционные двигатели выпускаются двух типов: 1) с дисковым якорем и печатной обмоткой; 2) с полым немагнитным якорем и обычной обмоткой. Один из вариантов двигателя первого типа показан на рис. 2.14. В его состав входят: дисковый якорь 1, выполненный из тонкого изоляционного материала, на обеих сторонах которого фотохимическим методом нанесена обмотка якоря; кольца 2 и 3 из магнитомягкой стали, по которым замыкается магнитный поток, созданный постоянными магнитами 4, и щетки 5, непосредственно касающиеся оголенных проводников якоря. Как видно, здесь отсутствует отдельный коллектор.
Двигатель второго типа показан на рис. 2.15.
Якорь малоинерционных двигателей примерно в 8 раз легче, а момент инерции в 5¸10 раз меньше, чем у обычного двигателя. В результате их постоянные времени в 2¸ 2,5 раза меньше. К тому же они имеют практически безыскровую коммутацию, поскольку их секции обладают меньшей индуктивностью. К недостаткам таких двигателей можно отнести большой воздушный зазор, а, следовательно, большие габариты по сравнению с обычными машинами.
Управление mosfet’ом с помощью шим.
В одной из прошлых статей мы рассматривали как выбрать mosfet, работающий в ключевом режиме, но в ней ни слова не было сказано про потери мощности, возникающие в результате переключения ключа, или так называемые динамические потери.
А теперь то же самое на понятном языке, представим что у нас есть моторчик и мы хотим его включить, для этого надо подать на него напряжение. Если мы хотим включать моторчик в определённые моменты времени на 10 секунд, то удобно будет последовательно с ним поставить кнопку и нажимать её, когда хотим включить моторчик. Микроконтроллер кнопки нажимать не умеет, поэтому для управления двигателем с помощью микроконтроллера мы заменим кнопку mosfet’ом, в таком случае говорят, что mosfet работает в ключевом режиме, то есть как кнопка или ключ. Как выбрать mosfet для работы в таком режиме мы рассмотрели в этой статье.
Давайте немного изменим задачу, теперь мы хотим управлять скоростью вращения моторчика, используя всё тот же mosfet(моторчик у нас мощный и напрямую подать на него ШИМ нельзя). Самый простой способ сделать это, подать ШИМ на затвор mosfet’а, теперь изменяя коэффициент заполнения ШИМ мы, будем изменять среднее значение напряжения на затворе, таким образом сможем регулировать скорость вращения моторчика. Отличие этого примера от предыдущего в том, что переключение происходит часто, поэтому необходимо учитывать потери мощности на переключение, другими словами, динамические потери.
В таком случае формула для N-mosfet’а будет выглядеть следующим образом:

Начнём с первого слагаемого, которое отвечает за потери мощности на проводимость. Думаю у кого-то мог возникнуть вопрос, откуда там взялась буква D и что она значит?
Буквой D обозначают коэффициент заполнения(Duty Cycle), которая рассчитывается как отношение длительности сигнала к периоду следования импульсов.
Интуитивно понятно, что так, как ключ открыт не постоянно, а открывается на определённое время каждый период, то это надо учитывать, но почему надо умножать именно на коэффициент заполнения?
Для того чтобы разобраться в этом вопросе, давайте посмотрим на картинку ниже.
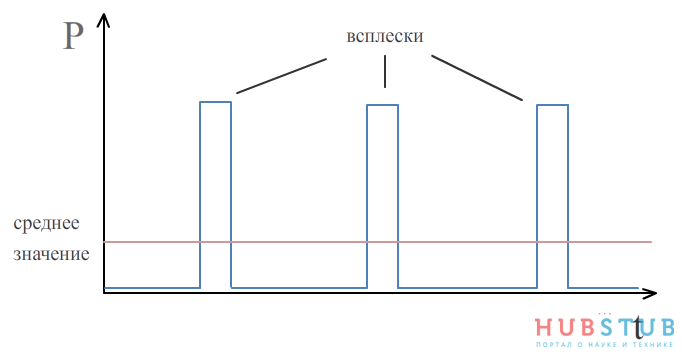
На картинке видно, что мощность во временной области проявляется всплесками, но при расчётах удобнее будет если мощность будет величиной постоянной во времени, для этого необходимо найти её среднее значение.
Как это сделать?
Мы можем мощность, выделяющуюся во время всплеска равномерно размазать по всему периоду, таким образом получим среднее значение мощности, которое будет выделяться на протяжении всего периода. А так как периоды повторяются то и мощность во временной области станет величиной постоянной. Размазать мощность по периоду очень просто, для этого надо мощность, которая выделяется во время всплеска разделить на период и умножить на время всплеска, что мы и делаем в первом слагаемом.
Всё с первым слагаемым разобрались, перейдём ко второму, которое как раз и отвечает за динамические потери, на рисунке они обозначены жёлтыми треугольниками с надписью Psw.
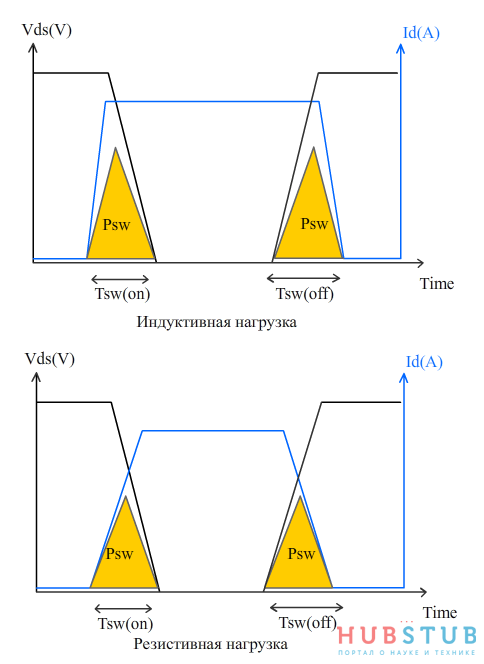
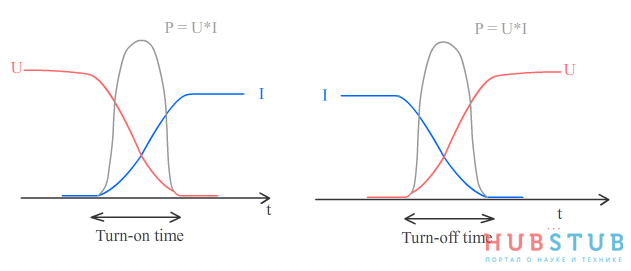
Причём вершина графика мощности, будет находиться в точке Id/2 и Uds/2, предлагаю запомнить эти значения, дальше мы ими воспользуемся.
Для теоретического расчёта потерь мощности на переключение, необходимо найти площадь «колокольчика», нарисованного серым цветом, а это значит вычислить интеграл, но, мне кажется, многим читателям это не будет интересным, по этому просто советую запомнить, что потери мощности при переключении примерно равны:
А теперь словами: «СРЕДНЕЕ значение ЗА ВРЕМЯ АКТИВНОГО РЕЖИМА примерно равно половине пиковой мощности.»
Почему примерно?
Потому что на самом деле они чуть меньше и мы берём с небольшим запасом. Как видно, значения, которые предлагал запомнить, необходимы для нахождения пиковой мощности.
Теперь надо сделать то же самое, что мы сделали выше, размажем полученную мощность по всему периоду, для этого умножим её на время переключения и разделим на время одного периода, таким образом получим среднее значение мощности за период. А как мы помним периоды повторяются, поэтому мощность можно считать постоянной во времени.

В формуле операция деление на период заменена, умножением на частоту.
Что касается времени переключения, проще всего для его нахождения воспользоваться полным зарядом затвора Qg (который нормируется при заданных Vds, Id и Vgs), взятым из даташита. Тогда ток затвора можно будет найти по формуле Ig = Qg/t, где t — требуемое время переключения.
Почему написал, что это самый простой способ, ведь можно воспользоваться значением ёмкостей? Потому что ёмкости сильно нелинейны и зависят от напряжений и ещё необходимо учитывать эффект Миллера. А полный заряд затвора(Qg) разработчики ввели специально для того, чтобы облегчить нам жизнь.
В принципе на этом можно было бы закончить, но ещё кое-чем хотелось бы поделиться. Если первую формулу переписать через скважность(S) и скважность активного режима(Sa).
Обзор драйвера с парой MOSFET на AOD4184
Автор: Сергей · Опубликовано 02.01.2021 · Обновлено 30.12.2020

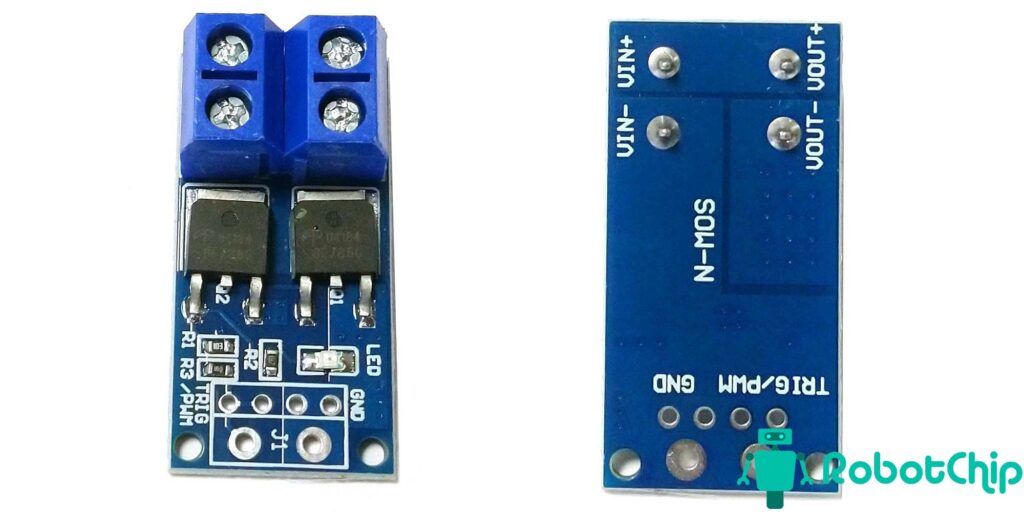
Сегодня расскажу модуле управления нагрузкой с парой MOSFET транзисторов с N-канальной логикой (AOD4184). С помощью данного модуля и контроллера Arduino, можно управлять нагрузкой постоянного тока до 15 А.
Технические параметры:
► Транзисторе: AOD4184;
► Управляющее напряжение: 3.3 – 20 В;
► Напряжение для управляемых устройств: 36 В;
► Максимальный ток для управляемых устройств: 15 А;
► Размеры: 34 x 17 x 12 мм;
► Вес: 6 г.
Описание драйвера с парой MOSFET на AOD4184
В модуле используется два N-канальных полевых MOSFET транзистора AOD4184, это позволило увеличить пропускной ток, без использования громоздких радиаторов. Управление осуществляется с помощью напряжения от 3.3 до 20 В (обычно используют 5 В), управляемый ток при этом около 15 А. Так-же надо учитывать, что на модуле нету защитного диода и при управлении индуктивной нагрузкой необходимо установить его отдельно, чтобы защитить контроллер и модуль от обратного скачка напряжения.
Подключение драйвера на AOD4184:
Для подключения модуля используется три вывода (разъема). Логический сигнал для включения / выключения MOSFET транзисторов, источник питания постоянного тока для питания управляемого устройства (нагрузки) и, наконец, самой нагрузки. Логический сигнал подключается к разъему J1, с двумя отверстиями на 0.5 мм, для установки винтового разъема и четырьмя на 0.25 мм, для установки штыревого разъема. Контакты обозначены TRIG / PWM и GND. Источник питания нагрузки постоянного тока подключается к винтовым клеммам с маркировкой VIN + / VIN-. Положительный вывод источника питания подключается к VIN +, а заземление — к VIN-.
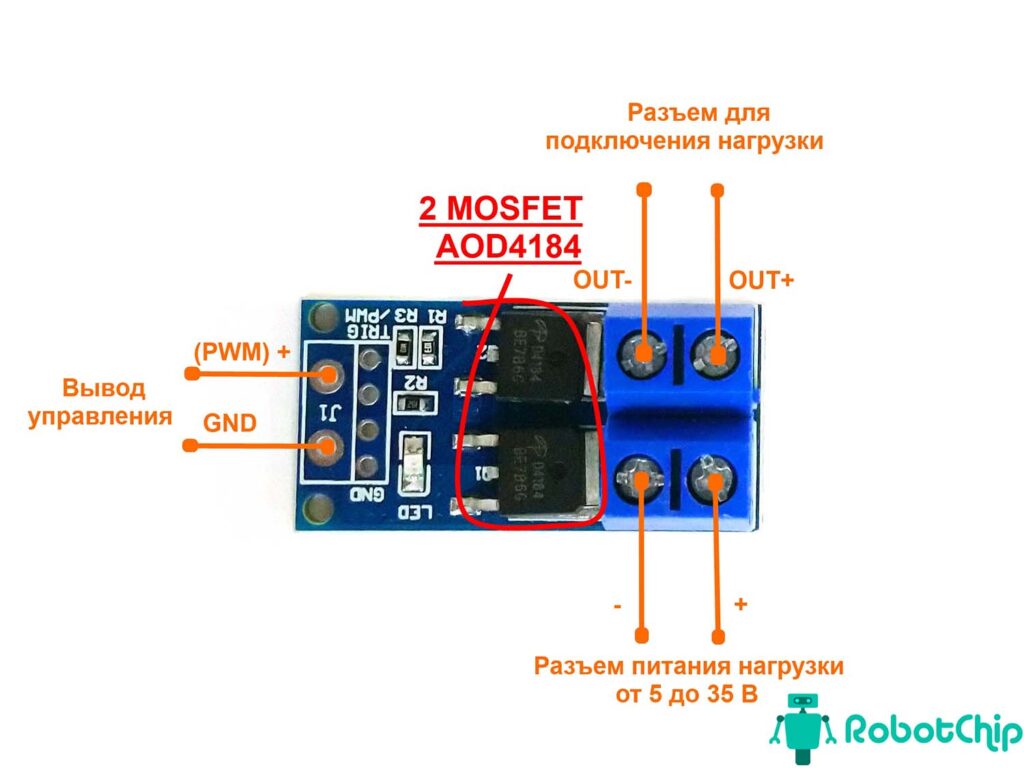
Управляемая нагрузка подключается к винтовым клеммам с маркировкой OUT + / OUT- на задней стороне модуля. Положительный вывод подключается к OUT +, а отрицательный вывод подключается к OUT-
Назначение контактов:
► TRIG / PWM — вход логического сигнала, активен высокий
► GND — сигнальная земля
► VIN + — подключение к источнику питания (5-36 В), используемому для питания нагрузки
► VIN — — подключение к заземлению источника питания
► VOUT + — подключение к плюсовому проводу нагрузки (двигатель, светодиоды, вентилятор и т. Д.)
► VOUT — — подключение к отрицательному проводу нагрузки
Подключение драйвера с парой MOSFET на AOD4184 к Arduino
Необходимые детали:
► Arduino UNO R3 x 1 шт.
► Драйвера с парой MOSFET на AOD4184 x 1 шт.
► Провод DuPont, 2,54 мм, 20 см, F-M (Female — Male) x 1 шт.
► Мотор-колесо, диаметр 66 мм x 1 шт.
► Кабель USB 2.0 A-B x 1 шт.
Описание примера:
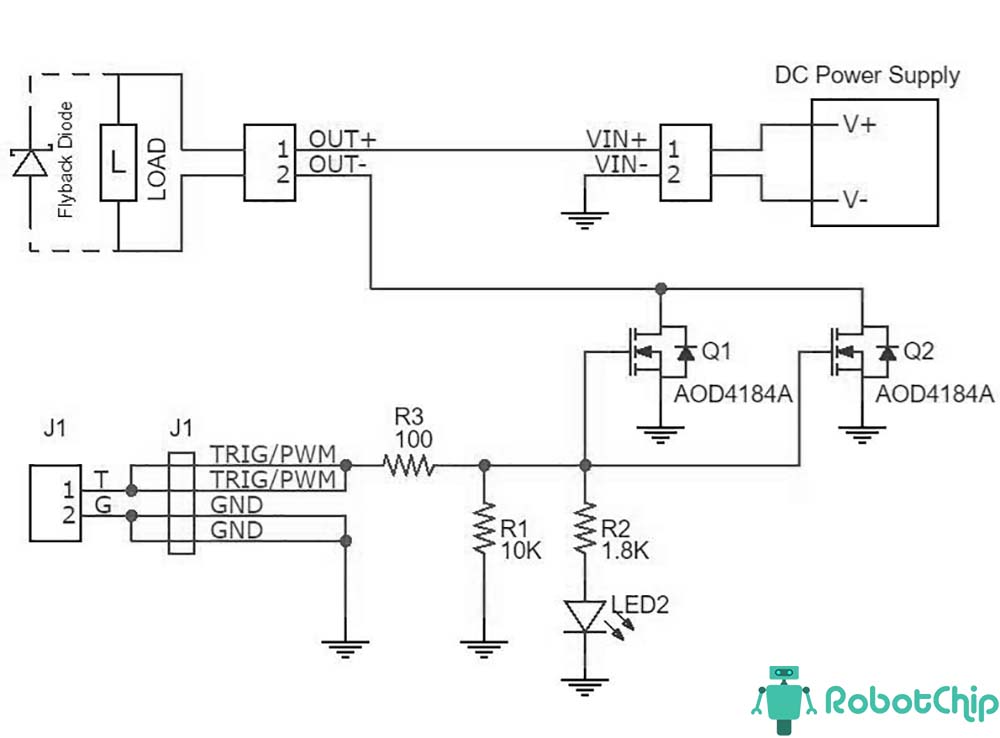
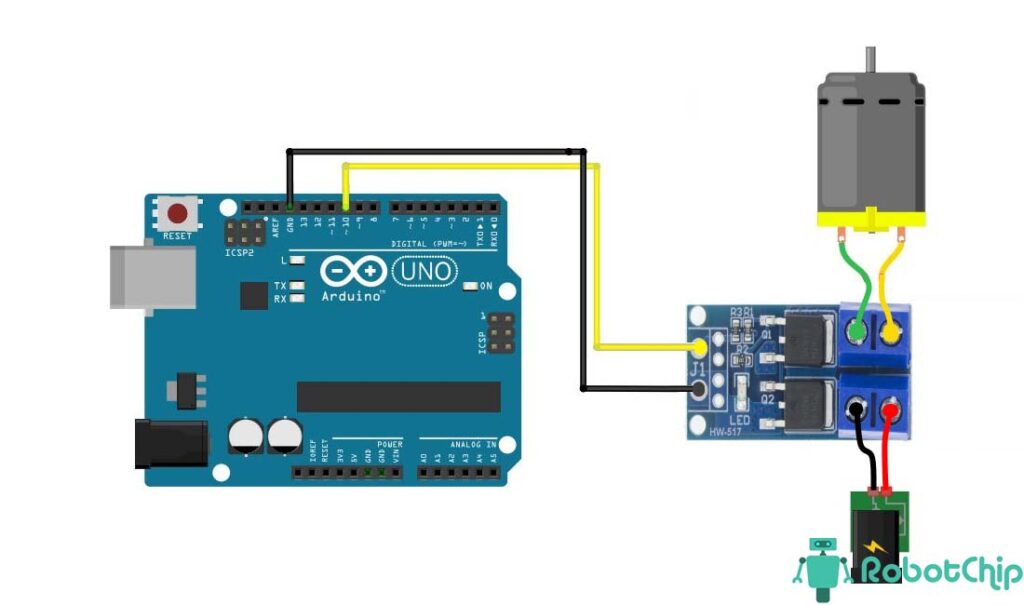
В данном примере подключим драйвер с парой MOSFET на AOD4184 к Arduino UNO R3, с помощью них будем управлять обычный щёточным двигателем постойного тока, в качестве источника питания используем блок питания на 12В. Так как, нагрузка у нас индуктивная необходимо поставить защитный диод в цепи питания двигателя, так же желательно подключить три конденсаторы на двигатель, параллельно питанию и два между выводом питания и корпусом.
Подключение:
Теперь приступим к сборке схемы, подключим вывод 10 Arduino UNO к выводу TRIG / PWM на драйвере, затем подключим GND — GND. Теперь необходимо подключить модуль к источнику питания на 12 В, вывод VIN + подключим к + 12В, а вывод VIN — — GND. Осталось подключить двигатель, вывод VOUT + и VOUT+ подключаем к выводам двигателя (двигатель будет крутится в одном направлении, реверс не возможен). Так-же не забываем о диоде и конденсаторов, конечно при тестировании можно пренебречь ими, но в готовом устройстве лучше установить.
Программа:
Скопируйте приведенный ниже скетч и загрузите его на свою плату Arduino.