Em 141 шаговый двигатель характеристики
17HS4401
Nema 17HS4401 характеристики
- Номинальный ток — 1.7 А;
- Крутящий момент — 5.5 кг x см;
- Момент удержания — 2.8 кг х см;
- Угловой шаг — 1.8° ±5%, 200 шагов;
- Индуктивность фазы — 2.8 мГн;
- Сопротивление фазы — 1.5 Ом;
- Число фаз — 2;
- Разъем — 4 PIN;
- Габариты — 42×42×48 мм;
- Диаметр вала — 5 мм;
- Длина вала — 24 мм;
- Фланец — 42 мм.
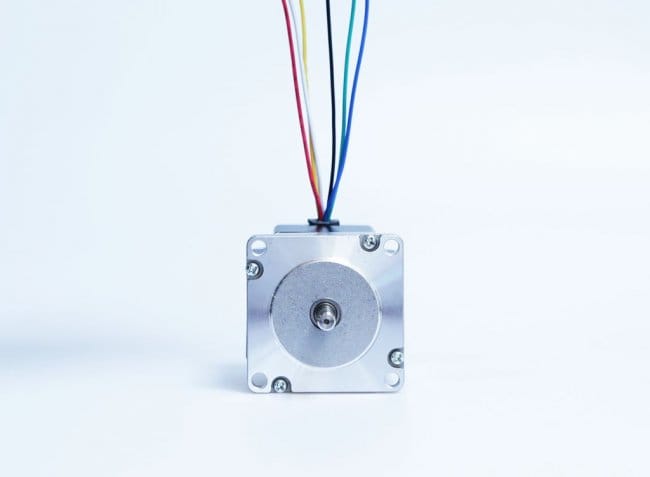
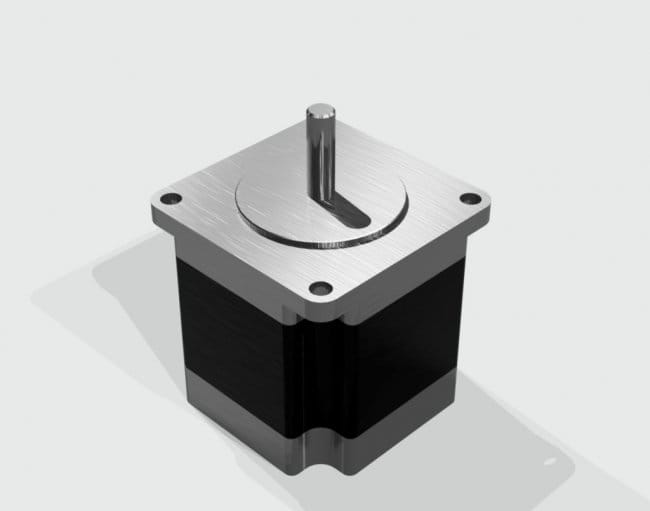
Шаговый двигатель 17HS4401
Шаговые двигатели имеют достаточно широкое применение в сегодняшнее время. В первую очередь, следует заметить, что это электродвигатели. Следовательно, в них электрическая энергия переходит в механическую. Это недорогой способ решения проблем при сборке различных устройств.
Электродвигатель представляет собой подвижный ротор и неподвижный статор. Первый из них содержит постоянный магнит, а второй катушки, на каждой из которых есть обмотка. Говоря простым языком, намагниченный сердечник окружен катушками с обмоткой. Точно контролируя ток можно заставить вал двигаться дискретно. Электричество подается на одну. Туда притягивается намагниченный вал, потом на другую – снова движение вала. При применении технологии микрошагов, у моторов есть возможность подавать ток одновременно на две катушки и тогда вал будет останавливаться в промежуточном этапе между ними.
Способ подключения обмоток и определяет тип подключения шагового электромотора. Данный вид, исходя из названия, не вращается непрерывно, движение происходит пошагово. Важной характеристикой является шаг ротора, то есть угол, на который поворачивается ротор при одном импульсе, он и является частью полного оборота. И размер этого шага зависит от устройства мотора и от способа управления.
Существуют три вида степперов: с постоянным магнитом, с переменным и гибридные. По видам подключения выделяют униполярный и биполярный. По способам управления: полношаговый, полушаговый и волновой.
Гибридные шаговые, к которым относится 17hs4401 появились позже, и, как и понятно из названия, соединили в себе все плюсы предыдущих вариантов. Основным преимуществом стала возможность сделать угол шага меньше. Мотор прекрасно справляется и с динамическими крутящими моментами и с удерживающими и может производить вращение с гораздо большей скоростью, чем его предшественники. Но стоимость такого выше, однако, это компенсируется его возможностями. Чаще всего можно встретить 100 или 200 микрошагов на целый оборот и с шагом, соответственно 3,6 и 1,8 градуса.
Шаговый электродвигатель NEMA 17hs4401 один из самых популярных из этой серии. Что значит NEMA. Многие ошибочно полагают, что это название компании производителя, однако это Национальная Ассоциация производителей электрооборудования. Хоть она и базируется в США, но, фактически, имеет международные стандарты. В 1984 Ассоциация установила несколько стандартов для размеров, которые используются и сегодня: NEMA 17 и NEMA 23. Часто многие описывая процесс создания какого-либо устройства, а чаще всего его используют для 3D – принтеров, указывают NEMA 17, что характеризует только размер, без учета таких важных факторов как напряжение, ток, угол шага, его полярность.
Основные важные характеристики биполярного гибридного. Размер: 40мм*42мм*42мм. Длина вала 24 мм, его диаметр 5 мм. Расстояние между крепежами 31,5 мм. Сам корпус выполнен из алюминия и пластин стали. Номинальный ток 1,7 А, 2 фазы, сопротивление фазы 1,5 Ом, индуктивность фазы 2,8 мГн, момент инерции 54г*см2, момент удержания 4 кг*1 см, крутящий момент 40 Н/см. Вес 280 грамм. Провода обязательно идут в комплекте. Они могут быть отдельными, а не впаяны в него, а могут быть закреплены внутри. Их четыре и длина обычно около 40 см. Угол 1,8 градуса.
Данный электромотор из-за малого угла вращения позволяет произвести настройки таким образом, что вибрация снижается. Точность возможно увеличить в десять, а то и в двадцать раз. Лучше всего не экспериментировать с драйверами и платами, и использовать Arduino при управлении. Подключается к плате степпер с помощью драйвера А4988. Мотор 17hs4401 биполярный, он более эффективный, так как пользуется всей обмоткой. Минус, а точнее, просто сложность, в том, что для него требуется использование более сложного контроллера. Питаться он может от сети 12 V, что очень удобно при сборке приборов. В этой модели возможно работать с микрошагами, что позволяет лучше позиционировать остановку, и это очень полезно для станков с ЧПУ.
Каким образом подключается двухфазный прибор. При покупке к нему должна прилагаться инструкция с картинками, при отсутствии таковой можно найти фазы опытным путем. Следует использовать мультиметр для «прозвона» проводов попарно. Если сигнала нет, значит, они относятся к разным фазам. Попарно делим провода, основываясь на сигналах мультиметра. Берем драйвер. Либо на нем, либо в его описании есть обозначения А плюс, А минус, и В плюс, В минус. Присоединяем провода, если перепутаются местами плюс и минус, то вращение начнется в другую сторону. Следует поменять их местами для правильного направления.
Использование 17hs4401 очень широко. Его ставят в станках с ЧПУ, аналоговых часах, 3D – принтерах, лазерных граверах, квадрокоптерах. Перечислять можно бесконечно. Увидеть в работе такой движок может даже непрофессионал, когда открывает объектив фотоаппарата и фокусируется на изображении. Скорее всего, именно таким степпером приводится в действие объектив.
Использование такого устройства обеспечивает точность, плавность при грамотном использовании драйверов управления и надежность. Их относительно невысокая стоимость делает процесс создания приборов максимально доступным. Купить такой мотор можно как в магазинах у официальных дилеров, так и в известном всем интернет-магазине. Следует внимательно отнестись к приобретению, потому что качество обмотки – это лотерея в китайских магазинах, но от нее зависит качество двигателя. Единственный момент, необходимо иметь знания для подключения и работы с контроллером, но, скорее всего, человек, который не понимает в электронике и конструировании приборов абсолютно ничего не возьмется за его создание.
SamPawno
- Темы без ответов
- Активные темы
- Поиск
- Наша команда
Работа с шаговым мотором 28BYJ-48 и драйвером ULN2003
- Версия для печати
#1 Дим » 14 мая 2019, 19:45
Сегодня вы узнаете о четырехфазном шаговом двигателе 28BYJ-48, работающим от постоянного напряжения 5 Вольт. Также существует его модификация на 12 Вольт. Двигатель потребляет значительный ток, а это значит, что мы не можем подключить его напрямую к выводам Arduino. Воспользуемся для этого драйвером двигателя на микросхеме ULN2003.
Технические параметры двигателя 28BYJ-48
Модель: 28BYJ-48
Тип двигателя: Униполярный
Напряжение питания: 5 Вольт, DC
Количество фаз: 4
Частота: 100 Гц
Сопротивление: 50Ω ± 7% (при 25 ℃)
Общие сведения о движке
4-х фазный шаговый двигатель 28BYJ-48 — это бесколлекторный двигатель, имеющий дискретное перемещение (вращение вала осуществляется шагами). На роторе (валу), расположен магнит, а вокруг него находятся катушки. Подавая поочередно ток на эти катушки, создается магнитное поле, которое отталкивает или притягивает магнитный вал, заставляя двигатель вращаться. Такая конструкция позволяет с большой точностью управлять валом, относительно катушек. Принципиальная схема четырехфазного шагового двигателя 28BYJ-48 приведена ниже.
Двигатель называется четырех фазным, из-за того, что в нем содержится две обмотки, которые, в свою очередь, разделены на четыре. (Это отражено на схеме выше). Центральные отводы катушек подключены вместе и служат для питания двигателя. Так как каждая обмотка подключена к питанию, такие двигатели называют униполярными. На роторе 28BYJ-48 расположено 8 магнитов, с чередующимися полюсами (то есть, четыре магнита с двумя полюсами).
На рисунке видно, что внутри расположен редуктор, с примерным передаточным числом в 1:64, если быть точнее 1:63,68395. Это значит, что двигатель за один оборот осуществляет 4075.7728395 шага. Данный двигатель поддерживает полушаговый режим и за один полный оборот может совершать 4076 шага, а точнее за 1° делает примерно 11,32 шага. (4076 / 360 = 11,32).
Режимы работы двигателя:
Чаще всего, при использовании шагового двигателя 28BYJ 48, используют два режима подключения.
Полушаговый режим — за 1 такт, ротор делает ½ шага.
Полношаговый режим — за 1 такт, ротор делает 1 шаг.
Ниже представлены таблицы последовательности тактов:
Модуль управления шаговым двигателем ULN2003:
Цифровой вывод микроконтроллера выдает ток до
40 мА, а одна обмотка 28BYJ-48 в пике потребляет
320 мА, то есть, если подключить двигатель напрямую, микроконтроллер сгорит. Для защиты был разработан модуль шагового двигателя ULN2003, в котором используется микросхема ULN2003A (состоящая из 7 ключей), которая позволяет управлять нагрузкой до 500 мА (один ключ). Данный модуль может работать с 5 Вольтовым и 12 Вольтовым двигателем 28BYJ-48. Для переключения необходимо установить или убрать перемычку (по умолчанию перемычка установлена на питание 5 Вольт).
С принципиальной схемой модуля ULN2003 можно ознакомиться на рисунке ниже
IN1 . . . IN7: Вход 1 … 7
1 — GND: «-» питание модуля
2 — Vcc: «+» питание модуля (5В или 12В)
3 — Vcc: «+» питание модуля (перемычка, только при 5В)
4 — Vcc: «+» питание модуля (перемычка, только при 5В)
A . . . G: Выход 1 … 7
1 — Питание
2 — A
3 — B
4 — C
5 — D
Подключение шагового двигателя 28BYJ-48
Arduino UNO R3 x 1 шт.
Модуль драйвера шагового двигателя ULN2003 x 1 шт.
Шаговый двигатель 28BYJ-48-5V (5В) x 1 шт.
Провод DuPont, 2,54 мм, 20 см, F-M (Female — Male) x 1 шт.
Кабель USB 2.0 A-B x 1 шт.
В данном примере используется модуль ULN2003, Arduino UNO R3 и двигатель 28BYJ-48-5V. Схема довольно простая, необходимо всего 6 проводов. Вначале подключаем интерфейсные провода, IN1 (ULN2003) в 11 (Arduino UNO), IN2 (ULN2003) в 10 (Arduino UNO), IN3 (ULN2003) в 9 (Arduino UNO) и IN4 (ULN2003) в 8 (Arduino UNO). Остается подключить питание GND к GND и VCC к VIN (не для постоянного использовании). Подключим разъем двигателя в модуль ULN2003. Схема собрана, теперь надо подготовить программную часть.
Для вращения двигателя по часовой и против часовой стрелки, используется библиотека CustomStepper. Данная библиотека не входит в стандартную среду разработки Arduino IDE, поэтому ее надо скачать и добавить. Далее, запускаем среду разработки IDE и копируем скетч. Если все правильно сделать, двигатель начнет вращаться.
Пример программы для работы с двигателем 28BYJ-48
#include // Подключаем библиотеку CustomStepper
CustomStepper stepper ( 2 , 3 , 4 , 5 ); // Указываем пины, к которым подключен драйвер шагового двигателя
boolean rotate1 = false ; // Переменная для смены режимов
boolean rotatedeg = false ; // Переменная для смены режимов
boolean crotate = false ; // Переменная для смены режимов
void setup ()
<
stepper . setRPM ( 10 ); // Устанавливаем количество оборотов в минуту
stepper . setSPR ( 4075.7728395 ); // Устанавливаем колочество шагов на полный оборот. Максимальное значение 4075.7728395
>
Введение в устройство шаговых двигателей

Если вы когда-либо имели удовольствие демонтировать старый принтер, чтобы сохранить электронные компоненты, то можете столкнуться с множеством цилиндрических загадочных моторов с 4 или более проводами, выступающими из сторон. Возможно, вы слышали характерное жужжание настольного 3D-принтера или глючную электромеханическую симфонию дисков в CD приводе? Если так, то вы столкнулись с шаговым двигателем!
Шаговые двигатели заставляют электромеханический мир вращаться ( с более высоким крутящим моментом!), но в отличие от обычного двигателя постоянного тока, управление шаговым двигателем требует чуть больше, чем ток через два провода. В этой статье будет рассказано о теории проектирования и эксплуатации шагового двигателя. Как только рассмотрим основы, автор данного руководства покажет, как построить простые схемы для управления шаговыми двигателями, а затем как использовать специальные микросхемы драйверов.
Шаг 1: Что делает мотор шаговым двигателем?
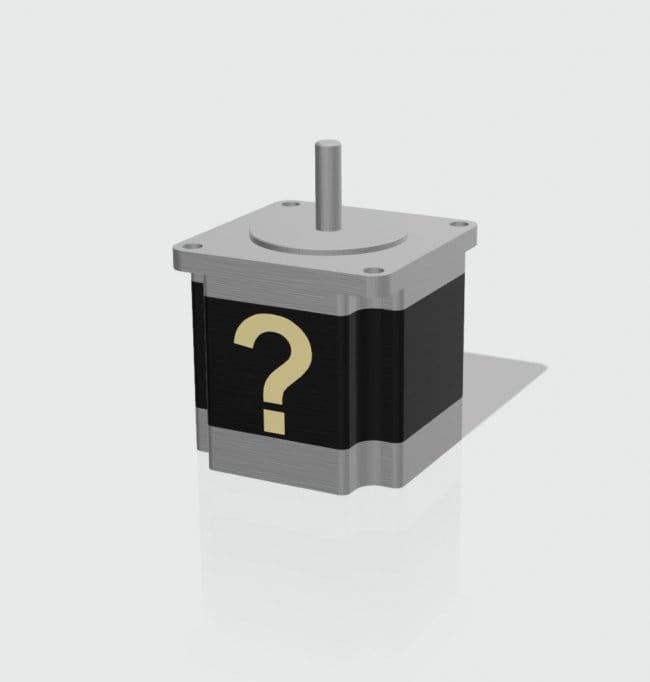
Кому может понадобиться более двух проводов и Н-мост? Зачем? Ну, в отличие от обычных щеточных двигателей постоянного тока, построенных для максимального числа оборотов (или кВ для RC), шаговые двигатели представляют собой бесщеточные двигатели, рассчитанные на высокий крутящий момент (впоследствии меньшую скорость) и более точное вращательное движение. В то время как типичный двигатель постоянного тока отлично подходит для вращения гребного винта на высокой скорости для достижения максимальной тяги, шаговый двигатель лучше подходит для прокатки листа бумаги синхронно со струйным механизмом внутри принтера или для осторожного вращения вала линейного рельса в мельнице с ЧПУ.
Внутри шаговые двигатели являются более сложными, чем простой двигатель постоянного тока, с несколькими катушками вокруг сердечника с постоянными магнитами, но с этой дополнительной сложностью обеспечивается больший контроль. Благодаря тщательному расположению катушек, встроенных в статор, ротор шагового двигателя может вращаться с заданным шагом, изменяя полярность между катушками и переключая их полярность в соответствии с установленной схемой зажигания. Шаговые двигатели не все сделаны одинаковыми, и для их внутреннего исполнения требуются уникальные (но базовые) схемы. Обсудим наиболее распространенные типы шаговых двигателей на следующем шаге.
Шаг 2: Типы шаговых двигателей
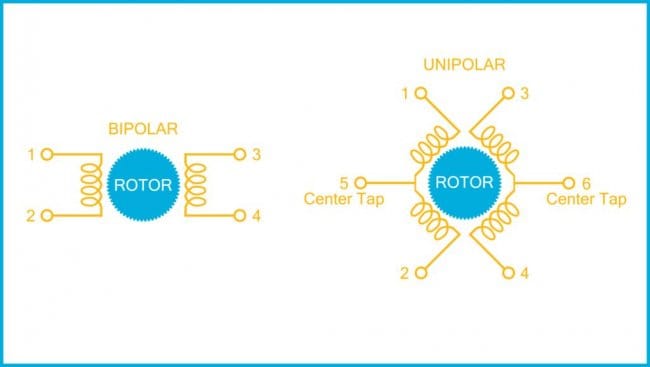

Есть несколько различных конструкций шаговых двигателей. К ним относятся однополярное, биполярное, универсальное и переменное сопротивление. Мы будем обсуждать конструкцию и работу биполярных и однополярных двигателей, так как это наиболее распространенный тип двигателя.
У однополярных двигателей обычно есть пять, шесть или восемь проводных выводов, идущих от основания, и одна катушка на фазу. В случае пятипроводного двигателя пятый провод представляет собой соединенные центральные отводы пар катушек. В шестипроводном двигателе каждая пара катушек имеет собственный центральный отвод. В двигателе с восемью проводами каждая пара катушек полностью отделена от других, что позволяет подключать ее в различных конфигурациях. Эти дополнительные провода позволяют приводить в действие однополярные двигатели непосредственно от внешнего контроллера с простыми транзисторами, чтобы управлять каждой катушкой отдельно. Схема зажигания, в которой приводится в действие каждая катушка, определяет направление вращения вала двигателя. К сожалению, учитывая, что за один раз подается только одна катушка, удерживающий момент однополярного двигателя всегда будет меньше, чем у биполярного двигателя того же размера. Обойдя центральные отводы однополярного двигателя, он теперь может работать как биполярный двигатель, но для этого потребуется более сложная схема управления. На четвертом шаге этой статьи мы приведем в действие однополярный двигатель, который должен прояснить некоторые из представленных выше концепций.
Биполярные двигатели, как правило, имеют четыре провода и являются более прочными, чем однополярный двигатель сравнительного размера, но поскольку у нас есть только одна катушка на фазу, нам нужно повернуть ток через катушки, чтобы перейти на один шаг. Наша потребность изменить ток означает, что мы больше не сможем управлять катушками напрямую с помощью одного транзистора, вместо этого — полная цепь h-моста. Построение правильного h-моста утомительно (не говоря уже о двух!), Поэтому мы будем использовать выделенный драйвер биполярного двигателя (см. Шаг 5).
Шаг 3: Понимание спецификаций шагового двигателя
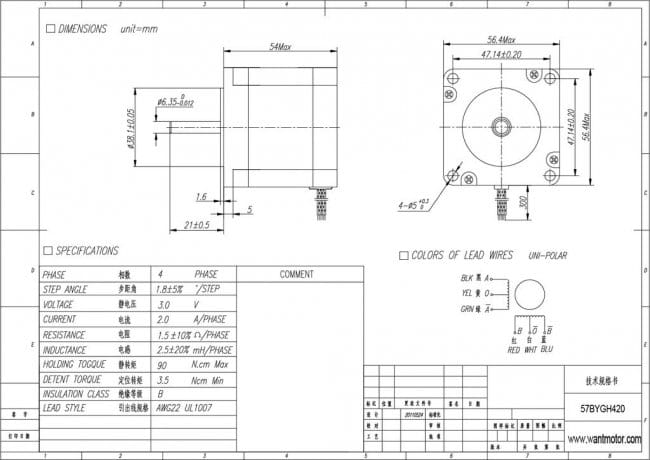
Давайте поговорим о том, как определить технические характеристики двигателя. Если вы встречали двигатель квадратного сечения с определенной сборкой из трех частей (см. Рисунок три), скорее всего, это двигатель NEMA. Национальная ассоциация производителей электрооборудования имеет определенный стандарт для спецификаций двигателя, использующий простой буквенный код для определения диаметра лицевой панели двигателя, типа крепления, длины, фазного тока, рабочей температуры, фазного напряжения, шагов на оборот и проводки.
Чтение паспорта двигателя
Для следующего шага будет использован этот однополярный мотор. Выше приложена таблица данных. И хотя она краткая, она предоставляет нам все, что нам нужно для правильной работы. Давайте разберем, что в списке:
Фаза: это четырехфазный однополярный мотор. Внутренне двигатель может иметь любое количество реальных катушек, но в этом случае они сгруппированы в четыре фазы, которые могут управляться независимо.
Шаг угла: При приблизительном разрешении 1,8 градусов на шаг мы получим 200 шагов на оборот. Хотя это является механическим разрешением, с помощью микроперехода мы можем увеличить это разрешение без каких-либо изменений двигателя (подробнее об этом в шаге 5).
Напряжение: номинальное напряжение этого двигателя составляет 3 вольта. Это функция тока и номинальных сопротивлений двигателя (закон Ома V = IR, следовательно, 3V = 2A * 1,5Ω)
Ток: сколько тока нужно этому двигателю? Два ампера на фазу! Эта цифра будет важна при выборе наших силовых транзисторов для базовой схемы управления.
Сопротивление: 1,5 Ом на фазу ограничит то, какой ток мы можем подать на каждую фазу.
Индуктивность: 2,5 мГн. Индуктивная природа катушек двигателя ограничивает скорость зарядки катушек.
Удерживающий момент: это то, сколько фактической силы мы можем создать, когда на шаговый двигатель подано напряжение.
Момент удержания: это то, какой момент удержания мы можем ожидать от двигателя, когда он не находится под напряжением.
Класс изоляции: класс B является частью стандарта NEMA и дает нам рейтинг в 130 градусов Цельсия. Шаговые двигатели не очень эффективны, и постоянное потребление максимального тока означает, что они будут сильно нагреваться при нормальной работе.
Показатели обмотки: диаметр провода 0,644 мм., количество витков в диаметре 15,5, сечение 0,326 мм2
Определение пар катушек
Хотя сопротивление обмоток катушки может варьироваться от двигателя к двигателю, если у вас есть мультиметр, вы можете измерить сопротивление на любых двух проводах, если сопротивление Шаг 4: Непосредственное управление шаговыми двигателями
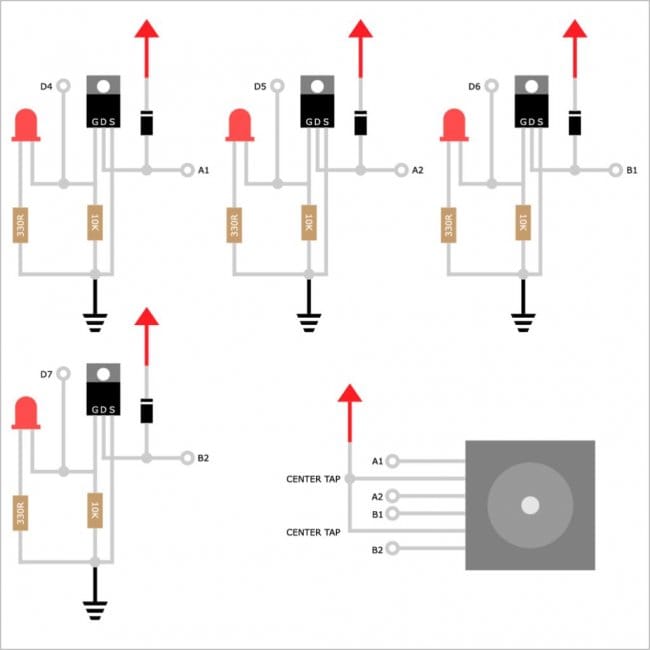
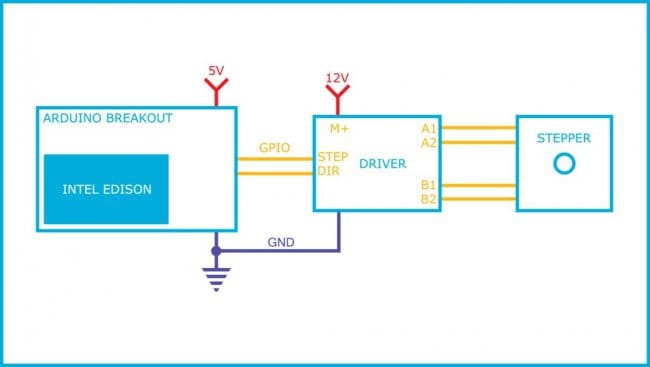
Благодаря расположению проводов в однополярном двигателе мы можем последовательно включать катушки, используя только простые силовые полевые МОП-транзисторы. На рисунке выше показана простая схема с МОП-транзистором. Такое расположение позволяет просто контролировать уровень логики с помощью внешнего микроконтроллера. В этом случае легче всего использовать плату Intel Edison с коммутационной платой в стиле Arduino, чтобы получить легкий доступ к GPIO (однако подойдет любой микро с четырьмя GPIO). Для этой схемы используется транзистор IRF510 N-канальный мощный MOSFET. IRF510, способный потреблять до 5,6 ампер, будет иметь достаточно свободной мощности, чтобы удовлетворить потребности двигателя в 2 амперах. Светодиоды не нужны, но они дадут вам хорошее визуальное подтверждение последовательности работы. Важно отметить, что IRF510 должен иметь логический уровень не менее 5 В, чтобы он мог потреблять достаточный ток для двигателя. Мощность двигателя в этой цепи будет 3 В.
Полное управление однополярным двигателем с помощью этой настройки очень простое. Для того, чтобы вращать двигатель, нам нужно включить фазы в заданном режиме, чтобы он вращался правильно. Чтобы вращать двигатель по часовой стрелке, мы будем управлять фазами следующим образом: A1, B1, A2, B2. Чтобы вращать против часовой стрелки, мы просто изменим направление последовательности на B2, A2, B1, A1. Это хорошо для базового контроля, но что, если вы хотите большей точности и меньше работы? Давайте поговорим об использовании выделенного драйвера, чтобы сделать всё намного проще!
Шаг 5: Платы драйверов шаговых двигателей
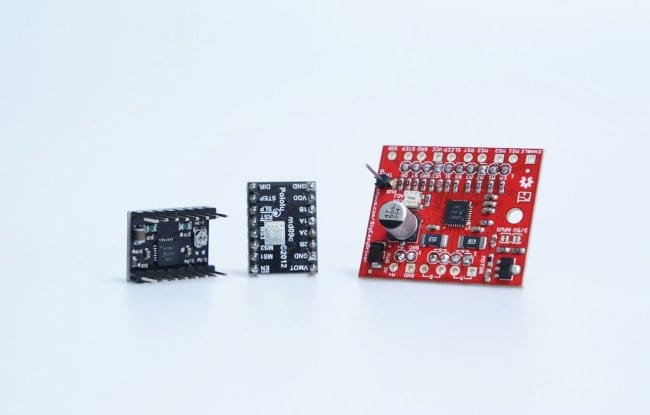
Если вы хотите приступить к управлению биполярными двигателями (или однополярными двигателями в биполярной конфигурации), вам нужно взять специальную плату управления драйвером. На фото выше изображен драйвер Big Easy Driver и плата-носитель драйвера шагового двигателя A4988. Обе эти платы являются печатными платами для микрошагового двухполюсного драйвера шагового двигателя Allegro A4988, который на сегодняшний день является одним из наиболее распространенных чипов для привода небольших шаговых двигателей. Помимо наличия необходимых двойных h-мостов для управления биполярным двигателем, эти платы дают много возможностей для крошечной недорогой упаковки.
Эти универсальные платы имеют удивительно низкое соединение. Вы можете начать управлять двигателем, используя только три соединения (только два GPIO) с вашим главным контроллером: общее заземление, шаг и направление. Ступенчатый шаг и его направление остаются плавающими, так что нужно привязать их к опорному напряжению с нагрузочным резистором. Импульс, посылаемый на вывод STEP, будет перемещать двигатель на один шаг с разрешением в соответствии с эталонными выводами микрошага. Логический уровень на выводе DIR определяет, будет ли двигатель вращаться по часовой стрелке или против часовой стрелки.
В зависимости от того, как установлены выводы M1, M2 и M3, вы можете добиться увеличения разрешения двигателя с помощью микрошагования. Микрошаг включает в себя посылку разнообразных импульсов, чтобы тянуть двигатель между электромагнитным разрешением физических магнитов в роторе, обеспечивая очень точное управление. A4988 может перейти от полного шага до разрешения шестнадцатого шага. С нашим двигателем 1,8 градуса это обеспечит до 3200 шагов за оборот. Поговорим о мелких деталях!
Подключение двигателей может быть легким, но как насчет управления ими? Посмотрите эти готовые библиотеки кода для управления шаговыми двигателями:
Stepper — классика, встроенная в Arduino IDE, позволяет выполнять базовый шаг и управление скоростью вращения.
AccelStepper — гораздо более полнофункциональная библиотека, которая позволяет лучше управлять несколькими двигателями и обеспечивает правильное ускорение и замедление двигателя.
Intel C ++ MRAA Stepper — библиотека более низкого уровня для тех, кто хочет углубиться в управление необработанным шаговым двигателем C ++ с помощью Intel Edison.
Этих знаний должно быть достаточно, чтобы вы поняли как работать с шаговыми двигателями в электромеханическом мире, но это только начало.
Em 141 шаговый двигатель характеристики
- Гибридные шаговые двигатели
- Обзор моторов
- Правила обозначения ШД
- 8H2A
- 11H2A
- 14H2A
- 14H2M
- 14H2K
- 14H2R
- 16H2M
- 16H2A
- 17H2M / 17H2K
- 17H2A
- 17H2E
- 23H2M
- 23H2A
- 23L
- 24H2A
- 23H2B
- 34H2A
- 34H2M
- 34H2B
- 34H2Y
- 43H2A
- 17H3A
- 23H3A
- 24H3A
- 34H3A
- 24H5A
- 34H5B
- Серводвигатели
- Вентильные двигатели
Приводы шаговых двигателей
Мотор-редукторы
Шаговые двигатели
Примеры использования
- Теория
 Контакты
Контакты
 На главную
На главную
- Нові шинні з’єднання для контакторів від LOVATO Electric — 12.09.2021
- Компактні синхронні серводвигуни m850 Lenze для задач позиціонування — 06.09.2021
- Рішення АВР від Socomec — 29.08.2021
- Новий контролер АВР ATL500 Lovato Electric з функцією NFC — 16.08.2021
КОНСТРУКЦИЯ ОБОЗНАЧЕНИЯ
для гибридных шаговых двигателей
Пример заказного номера: 23H2A4425-05A
| 23 | H | 2A | 4 | 4 | 25 | — | 05 | A |
ОБОЗНАЧЕНИЕ ЗАКАЗНОГО НОМЕРА ДЛЯ ГИБРИДНЫХ ШАГОВЫХ МОТОРОВ
| 23 | Габарит корпуса (Nema) 8 = 20 mm 11 = 28 mm 14 = 35 mm 16 = 39 mm 17 = 42 mm 23 = 57 mm 24 = 60 mm 34 = 86 mm 43 = 110 mm |
H | Тип мотора — Гибридный (Hybrid) |
| 2A | Угол шага и форма 2A = 2-х фазный, 1.8 °, квадратный 2B = 2-х фазный, 1.8 °, круглый 2Y = 2-х фазный, 1.8 °, круглый (Высокомоментный) 2M = 2-х фазный, 0.9 °, квадратный 2K = 2-х фазный, 0.9 °, квадратный (новый дизайн) 2R = 2-х фазный, 0.9 °, круглый 2E = 2-х фазный, 3.6 °, квадратный 3A = 3-х фазный, 1.2 °, квадратный 5A = 5-х фазный, 0.72 °, квадратный 5B = 5-х фазный, 0.72 °, круглый 5C = 5-х фазный, 0.36 °, круглый |
4 | Длина корпуса мотора (Детали на странице каждой серии моторов) |
| 4 | Кол-во проводов (Обмоток) 4 = Биполярный (4-х проводный) 6 = Униполярный (6-ти проводный) 8 = Комбинированный Биполярный и Униполярный (8-ми проводный) |
25 | Номинальный ток Пример: 25 = 2.5 A 05 = 0.5 A |
| 05 | Заказной серийный номер Пример: 05 = 5-я версия |
A | Кол-во валов A = Один вал B = Двойной вал |
23H2A4425-05A = Габарит корпуса 57мм, 2-х фазный, 1.8 °, квадратный корпус 45мм, биполярный, 2.5A, 5-я версия, один вал
23H3A5635 = Габарит корпуса 57мм, 3-х фазный, 1.2 °, квадратный корпус 51мм, униполярный, 3.5A, стандарт