Электронная регулировка оборотов асинхронного двигателя
KOMITART — развлекательно-познавательный портал

Разделы сайта
- » На Главную
- » Радиолюбителю
- » APEX AUDIO
- » Блоки питания
- » Гитарные примочки
- » Своими руками
- » Автомобилисту
- » Service-Manual
- » PREAMPLIFIERS
- » Бесплатные программы
- » Компьютер
- » Книги
- » Женские штучки
- Готовим вкусно и быстро
- » Игры на сайте
- » Юмор
- » Разное — интересное
DirectAdvert NEWS
GNEZDO NEWS
Друзья сайта
Статистика
Как подключить трехфазный электродвигатель к сети 220 В. Регулятор оборотов.
Довольно часто для каких-либо хозяйственных нужд требуется использование трехфазного электродвигателя (например, в качестве привода для эл. наждака, циркулярной пилы, бетономешалки и т. д). Известно, что трехфазные электродвигатели рассчитаны и предназначены для работы в трехфазной сети и далеко не всегда в распоряжении домашнего мастера бывает нужное напряжение
380 В, ведь в подавляющем большинстве частные дома и, тем более квартиры подключены к питающей сети
Существуют разные способы включения трехфазного электродвигателя в однофазную сеть
220 В, самым простым и достаточно надежным из которых является применение фазосдвигающего конденсатора в схеме подключения его обмоток. Само название «фазосдвигающий конденсатор» говорит само за себя: он сдвигает ток по фазе на 90°, создавая в нем двухфазный вращающийся магнитный поток, который, собственно и вызывает вращение вала электродвигателя.
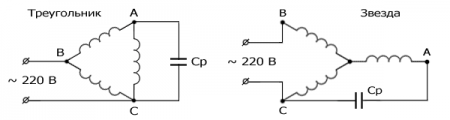
На схеме ниже показано подключение фазосдвигающих конденсаторов к обмоткам, соединенным в «звезду» и «треугольник», однако, следует учесть, что для снижения потерь мощности электродвигателя гораздо целесообразнее использовать соединение обмоток электродвигателя по схеме «треугольник».
Схемы подключения трехфазных электродвигателей с различными соединениями обмоток к однофазной сети
Стоит заметить, что для запуска любого электродвигателя требуется б́ольшая емкость конденсатора, чем для его работы (когда двигатель уже «набрал» обороты). Поэтому, на схеме ниже общая емкость «разбита» на два конденсатора: Сп — конденсатор с дополнительной емкостью для пуска электродвигателя и Ср — основной конденсатор с рабочей емкостью. В случае использования электродвигателя небольшой мощности (до 1 кВт) вполне можно «обойтись» лишь рабочей емкостью Ср, исключив из схемы конденсатор Сп.
Схема подключения трехфазного электродвигателя к однофазной сети:
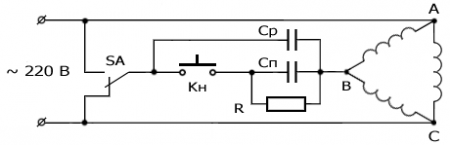
Резистор R включен в схему в качестве сопротивления для разрядки конденсаторов Сп и Ср, для этого подойдет резистор с сопротивлением 300 Ом. Для изменения направления вращения вала электродвигателя, в схеме предусмотрен тумблер переключатель SA.
Для расчета ёмкости рабочего конденсатора можно воспользоваться формулой:
С раб = 4800 • I / U , мкФ – для двигателей с обмотками, соединенными «треугольником»
С раб = 2800 • I / U , мкФ – для двигателей с обмотками, соединенными «звездой»
Это самый точный и наиболее предпочтительный способ расчета ёмкости рабочего конденсатора, но для его использования необходимо знать значение тока I в цепи двигателя, т. е. потребуются дополнительные измерения. Зная номинальную мощность электродвигателя, рассчитать ёмкость рабочего конденсатора можно так-же по формуле:
С раб = 66• Рном , мкФ, где Рном — номинальная мощность электродвигателя.
Говоря проще, для нормальной работы трёхфазного двигателя в сети
220 В рабочий конденсатор должен иметь ёмкость, близкую к 7 мкФ на каждые 0,1 кВт его паспортной мощности.
Определившись с емкостью рабочего конденсатора, можно определить нужное ее значение для пускового конденсатора: она должна быть примерно в 2,5-3 раза больше рабочего емкости рабочего конденсатора.
Конденсаторы рабочей емкости следует использовать следующих типов: МБГЧ, КГБ, БГТ с рабочим напряжением, превышающим сетевое напряжение примерно в 1,5 раза. Чтобы набрать нужную емкость, можно соединить (спаять) конденсаторы параллельно: тогда их общая емкость будет равна суммарной. Пусковую емкость тоже лучше всего набрать из конденсаторов этих типов, но при кратковременном пуске (не более 2-3 сек) можно использовать электролитические, типов КЭ-2, К50-3, ЭГЦ-М с рабочим напряжением не менее 450 в.
В заключение стоит сказать, что при включении трехфазного электродвигателя в однофазную сеть
220 В следует иметь ввиду неминуемую потерю его мощности. Если частота вращения уменьшается совсем незначительно в этом режиме, то потеря мощности может составлять 50% от номинальной. Поэтому, лучше в сеть
220 В включать электродвигатели с обмотками, соединенными «треугольником»- в однофазной сети они способны развить до 75% от своей номинальной мощности.
Как известно можно изменять (регулировать) скорость вращения асинхронного безколлекторного электродвигателя изменяя частоту питающего двигатель переменного напряжения. На этом принципе был разработан, приведенный здесь, электронный регулятор скорости вращения. Регулятор позволяет изменять скорость вращения в довольно широких пределах — от 1000 до 4000 об/мин.
Регулятор состоит из задающего генератора с регулируемой частотой от 50 до 200 Гц, в который входят мультивибратор на микросхеме К561ЛА7 , счетчик К561ИЕ8 формирующий сигналы управления с фиксированным «мертвым временем» для управления силовыми полевиками полумоста регулятора.
Выходной трансформатор Т1 обеспечивает развязку верхнего и нижнего транзисторов полумоста. Выпрямитель, удвоитель напряжения питающей сети состоит из диодного моста VD9, включенного по нестандартной схеме и конденсаторов фильтра на которых и удваивается напряжение питания полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4.
Для трансформатора управления ключами, использовался каркас трансформатора от БП телевизора KORFUNG Ч/Б. Можно применить любой другой с аналогичным сечением железа — тип магнитопровода не имеет значения. Первичная обмотка содержит 120 витков провода диаметром 0,7мм, с отводом от середины, вторичная — две отдельные обмотки по 60 витков тем же проводом. Данные по вольтажу обмоток: первичка 2х12 вольт, вторички 12 вольт каждая, если сечение железа отличается от заданного, расчитать можно по формулам для трансформаторов на 50Гц. Марка провода роли не играет (медный).
Обе вторичные обмотки нужно хорошо изолировать друг от друга, так как потенциал между ними достигает 640 вольт. Подключать выходные обмотки к затворам ключей необходимо в противофазе.
Регулятор может работать с двигателями мощностью до 500Вт. Для применения регулятора с более мощными двигателями необходимо применить в схеме большее число силовых ключей в параллельном включении и увеличить емкость конденсаторов фильтра питания С3 и С4.
Конструктивно регулятор выполнен на печатной плате размрами 110 х 80мм, трансформатор управления ключами ставится отдельно.
Чтобы не применять дорогой и сложный коллекторный двигатель в механизмах требующих изменения оборотов двигателя, можно обойтись асинхронным трёхфазным двигателем, введя в фазовый провод реостат или простейший регулятор мощности.
Переделка двигателя заключается в изменении якоря двигателя.
По образцу якоря, установленного в двигателе изготавливается «массивный якорь» из магнитомягкой малоуглеродистой стали или из серого чугуна (СЧ). (Чугунный работает лучше.) Из старого якоря можно выпрессовать вал и насадить на него массивный якорь.
Схема устройства запуска приведена на рисунке ниже.
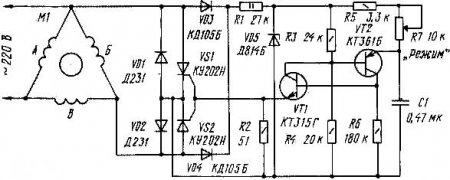
Двунаправленный электронный ключ выполнен на диодах VD1, VD2 и три-нисторах VS1, VS2. Диоды VD3 и VD4 образуют двухполупериодный выпрямитель сетевого напряжения, а резистор R1 и стабилитрон VD5 — стабилизатор выпрямленного напряжения. Управление тринисторами электронного ключа осуществляется транзисторами VT1, VT2. Момент включения электронного ключа устанавливают резистором R7 «Режим». При минимальном сопротивлении резистора ключ открывается в момент максимального напряжения на обмотке Б электродвигателя (см. рис. 2,6), при максимальном — ключ закрыт. Перед запуском двигателя движок резистора R7 переводят в крайнее нижнее (по схеме) положение, соответствующее максимальному фазовому сдвигу токов и, следовательно, наибольшему пусковому моменту на валу двигателя. После запуска тем же резистором устанавливают оптимальный режим работы двигателя в зависимости от его мощности и нагрузки. Как показала практика, устройство запуска эффективно работает с электродвигателями, частота вращения якоря которых не превышает 1500 об/мин и их обмотки соединены треугольником.
Устройство испытано на работе с двумя двигателями: мощностью 370 Вт (типа АААМ63В4СУ1) 1360 об/мин и мощностью 2000 Вт 1380 об/мин. В обоих случаях оно обеспечивало более уверенный запуск двигателя в сравнении с конденсаторной системой и мощность на валу двигателя после запуска была примерно одинаковой.
Детали устройства монтируют на печатной плате, которую размещают в корпусе из изоляционного материала. Тринисто-ры VS1, VS2 и диоды VD1, VD2 устанавливают на плате без теплоотводов. Резисторы — МЛТ, С2-33, конденсатор — К73-17. Транзисторы VT1 и VT2 могут быть любыми из тех же серий. Вместо диодов Д231, тринисторов КУ202Н можно использовать аналогичные другие с допустимым прямым током не менее 10 А и обратным напряжением не менее 300 В. При работе с устройством запуска следует иметь в виду, что все его элементы находятся под напряжением сети 220 В, поэтому необходимо соблюдать меры предосторожности.
Уважаемый Пользователь! О том, как получить нужный материал, прочитайте информацию по кнопке ниже:
Электронная регулировка оборотов асинхронного двигателя
Добавлено (26.08.2013, 13:34)
———————————————
а знаешь что будет если частота питающей сети отличается от номинала?
Насколько я знаю, для регулировки оборотов асинхронного двигателя нужно менять частоту тока. Вот скопировал с одного сайта  . Сам я это устройство не повторял.
. Сам я это устройство не повторял.

Как известно можно изменять (регулировать) скорость вращения асинхронного безколлекторного электродвигателя изменяя частоту питающего двигатель переменного напряжения. На этом принципе был разработан, приведенный здесь, электронный регулятор скорости вращения. Регулятор позволяет изменять скорость вращения в довольно широких пределах — от 1000 до 4000 об/мин.
Регулятор состоит из задающего генератора с регулируемой частотой от 50 до 200 Гц, в который входят мультивибратор на микросхеме К561ЛА7 , счетчик К561ИЕ8 формирующий сигналы управления с фиксированным «мертвым временем» для управления силовыми полевиками полумоста регулятора.
Выходной трансформатор Т1 обеспечивает развязку верхнего и нижнего транзисторов полумоста. Выпрямитель, удвоитель напряжения питающей сети состоит из диодного моста VD9, включенного по нестандартной схеме и конденсаторов фильтра на которых и удваивается напряжение питания полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4.
Для трансформатора управления ключами, использовался каркас трансформатора от БП телевизора KORFUNG Ч/Б. Можно применить любой другой с аналогичным сечением железа — тип магнитопровода не имеет значения. Первичная обмотка содержит 120 витков провода диаметром 0,7мм, с отводом от середины, вторичная — две отдельные обмотки по 60 витков тем же проводом. Данные по вольтажу обмоток: первичка 2х12 вольт, вторички 12 вольт каждая, если сечение железа отличается от заданного, расчитать можно по формулам для трансформаторов на 50Гц. Марка провода роли не играет (медный).
Обе вторичные обмотки нужно хорошо изолировать друг от друга, так как потенциал между ними достигает 640 вольт. Подключать выходные обмотки к затворам ключей необходимо в противофазе.
Регулятор может работать с двигателями мощностью до 500Вт. Для применения регулятора с более мощными двигателями необходимо применить в схеме большее число силовых ключей в параллельном включении и увеличить емкость конденсаторов фильтра питания С3 и С4.
Конструктивно регулятор выполнен на печатной плате размрами 110 х 80мм, трансформатор управления ключами ставится отдельно.
Добавлено (26.08.2013, 19:50)
———————————————
Он там регулирует от 50гц до 200гц. Но думаю, если изменить емкость С1 можно добиться частоты пониже. Тем самым и уменьшить обороты.
6 способов регулировки скорости двигателя с помощью ПЧ
Любой преобразователь частоты имеет несколько каналов управления частотой выходного напряжения и, соответственно, скоростью вращения электродвигателя. Рассмотрим основные каналы на примере преобразователя VT Drive Fit.
Итак, скорость двигателя можно регулировать следующими способами.
1. Настройка параметра F0-08 в меню устройства. Заданное значение частоты программируется и запоминается. В процессе работы частоту можно оперативно менять при помощи клавиш «Вверх» и «Вниз». Этот канал управления выбирается установкой функции F0-03 = 0. Измененное значение частоты после выключения питания не сохраняется и при повторном включении вновь возвращается к значению, установленному в F0-08. Задать запоминание измененной в процессе работы частоты можно установкой параметра F0-03 = 1.
2. Использование аналоговых входов Ai1, Ai2, Ai3. Все три входа могут быть входами по напряжению, с диапазоном от 0 до 10 В. Вход Ai2 может использоваться как токовый — на плате имеется специальный джампер для переключения. Если необходимо наличие входа Ai3 (диапазон напряжения – от -10 до +10 В), применяется дополнительная плата расширения, которая заказывается отдельно. Для выбора этих каналов нужно задать F0-03 = 2, 3, 4.
3. Использование импульсного высокочастотного входа Di5. На этот вход могут быть поданы импульсы с напряжением от 9 до 30 В и частотой до 100 кГц. Соответствие между частотой на входе Di5 и выходной частотой преобразователя частоты VT Drive Fit определяется в параметрах F4-28…F4-31. Импульсы для работы на этом канале могут быть получены с вращающегося энкодера, с индуктивного или оптического датчика, а также с дискретного выхода другого ПЧ или контроллера. Для выбора данного канала устанавливается F0-03 = 5.
4. Если в работе требуется несколько значений частоты, их можно предварительно задать, используя многоскоростной (многоступенчатый) режим. Для этого необходимо установить F0-03 = 6. Код выбора частоты задается подачей сигналов на четыре дискретных входа Di.
5. Использование датчика ПИД-регулятора. Датчиком может быть любой преобразователь давления, температуры, напряжения в сигнал напряжения или тока. При этом реализуется обратная связь, позволяющая регулировать и поддерживать постоянными различные параметры технологических процессов. Для выбора этого канала устанавливается F0-03 = 8.
6. Выходную частоту можно менять путем подачи сигналов Up / Down на соответствующие дискретные входы. Для этого нужно функцию (F00…F4-10) этих входов установить на значения 6 и 7.
Выбор между источниками частоты
В общем случае можно выбрать 3 источника частоты, каждый из которых имеет каналы управления, перечисленные выше.
- Главный источник частоты Х. Выбор канала производится в параметре Х0-03.
- Вспомогательный источник частоты Y. Выбор канала производится в параметре Х0-04.
- Сочетание (суперпозиция) главного и вспомогательного источников, X и Y.
Примеры установки канала управления скоростью приведены для главного источника частоты Х. Для вспомогательного канала Y параметры задаются аналогичным образом. Максимальная выходная частота, независимо от канала и источника, ограничена параметром, заданным в параметре F0-10 (50…320 Гц).
Возможность регулировки частоты при помощи переменного резистора (потенциометра) отсутствует. Плавная регулировка возможна только путем применения внешнего потенциометра, подключенного на аналоговый вход Ai1…Ai3.
Скорость вращения двигателя регулирование

Как мы уже знаем из курса ТОЭ, частота вращения ротора определяется по формуле:
Синхронная частота вращения зависит от частоты приложенного напряжения и количества пар полюсов
Исходя из этого, можно сделать вывод, что изменять скорость асинхронных ЭД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Способы регулирования бывают разные, например механические муфты, редукторы, различные шестерёнчатые трансмиссии или есть способ изменения количества полюсов обмоток ЭД. Но в рамках данной статьи поговорим о методах регулировки ЭД с помощью изменения электрических параметров: регулировки напряжения питания ЭД и настройки частоты питающего напряжения и с помощью изменения активного сопротивления в роторной цепи.
Данный метод регулирования скорости асинхронного ЭД широко используется в машинах с фазным ротором. При этом в роторную цепь подсоединяется дополнительный реостат, которым можно достаточно плавно увеличивать номинал сопротивления. С ростом сопротивления, скольжение ЭД увеличивается, а скорость вращения снижается. Т.е, происходит регулировка скорости вниз от естественной характеристики.
Огромным минусом этого метода является его экономическая неэффективность, т.к с ростом скольжения, потери в роторной цепи существенно увеличиваются, т.е, КПД двигателя стремительно падает.
Плюс к этому, механическая характеристика двигателя становится более мягкой и пологой, поэтому незначительное изменение момента нагрузки на валу ЭД, вызывает резкое изменение частоты вращения.

Регулирование скорости ЭД этим способом крайне не эффективно, но, несмотря на это факт, все еще используется в ЭД с фазным ротором.
Этот способ подразумевает включения в питающую цепь автотрансформатора (АТР), перед статорной обмоткой, после питающих проводов. При этом, если понизить уровень напряжения на выходе АТР, то ЭД будет работать на пониженном напряжении.

Это в свою очередь снизит частоты вращения, при постоянном моменте нагрузки, а также к снижению перегрузочной способности ЭД. Так как с снижением уровня питания, максимальный момент асинхронного ЭД снижается в квадрат раз. Кроме этого момент снижается быстрее, чем ток в рроторной цепи, а поэтому, увеличиваются и потери, с последующим нагревом ЭД.
Способ регулировки напряжения, возможен только по направлению вниз от естественной характеристики, так как повышать напряжение выше номинального уровня категорически не приветствуется, ведь это приведет к огромным потерям в двигателе, перегреву и неисправности.
Кроме АТР, можно использовать тиристорный регулятор напряжения и аналогичные схемотехнические решения, в том числе и с использованием микроконтроллеров.
При таком методе, к ЭД подсоединяют преобразователь частоты (ПЧ). Например Omron, Hitachi и т.п ,(например в флюорографе ФМЦ). В простых вариантах это тиристорный ПЧ. Регулировка скорости происходит с помощью регулировки частоты питающего напряжения f, потому, что она оказывает влияние на синхронную скорость вращения ЭД.

С снижением частоты , перегрузочная способность ЭД также снижается, чтобы этого не допустить, необходимо повысить величину напряжения U1. Номинал на который требуется повысить, зависит от типа привода. Если регулирование осуществляется с постоянным моментом нагрузки на валу, то напряжение требуется изменять пропорционально регулировки частоты (при снижении скорости). В случае увеличения скорости этого делать не стоит, напряжение должно быть на номинальных значениях, иначе это может причинить вред ЭД.
Если регулировка скорости осуществляется с постоянной мощностью электродвигателя, то изменение U1 требуется осуществлять пропорционально корню квадратному изменения f1.
При настройки установок с вентиляторной характеристикой, требуется регулировать U1 пропорционально квадрату изменения f1.
Регулирование способом изменения частоты, является наиболее лучшим вариантом для асинхронных двигателей на текущий момент, т.к при нем осуществляется регулирование скорости в достаточно широком диапазоне, без существенных потерь и падения перегрузочных способностей ЭД.
Обычно регулирование оборотов для двигателей на 220 вольт осуществляют с помощью тиристоров. Типовой схемой считается подсоединение электродвигателя в разрыв анодной цепи тиристора. Но во всех подобных схемах должен быть надежный контакт. И поэтому их нельзя применить в регулировании частоты вращения коллекторных двигателей, так как механизм щеток искусственно создает небольшие обрывы цепи.
Такой метод возможен только в многоскоростных асинхронных ЭД с короткозамкнутым ротором, т.к число полюсов этого ротора, всегда совпадает с полюсами статора.
В соответствии с формулой в начале страницы, скорость ЭД можно настраивать и изменением числа пар полюсов. Причём, в данном случае изменение скорости будет ступенчато, т.к как количество полюсов бывает только – 1,2,3,4,5.
Изменение их числа достигается с помощью переключения катушечных групп обмотки статора. При этом катушки коммутируются различными схемами, например “звезда — звезда” или “звезда – двойная звезда”. При соединении “звезда — звезда” получается изменение количества полюсов в соотношении 2:1. При этом будет постоянная мощность двигателя при переключении. При схеме “звезда – двойная звезда” изменяется количество полюсов в таком же соотношении, но еще обеспечивается постоянный момент двигателя.
Применение этого метода регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Серьезным недостатком способа является более сложная конструкция ЭД, а также увеличение его стоимости.