Электромеханическая характеристика асинхронного двигателя формула
Электромеханические свойства асинхронных двигателей Текст научной статьи по специальности « Электротехника, электронная техника, информационные технологии»
Аннотация научной статьи по электротехнике, электронной технике, информационным технологиям, автор научной работы — Селиванов Игорь Андреевич, Омельченко Евгений Яковлевич
Проанализировано совместное влияние многофазной питающей сети и асинхронного двигателя , выполнен анализ переходных процессов активной и реактивной мощности , потребляемой в многофазной L-R цепи при различных входных напряжениях и частотах, проанализировано влияние коэффициента мощности на качество электромеханических переходных процессов в различных системах электропривода. Ил. 2. Табл. 2. Библиогр. 8 назв.
Похожие темы научных работ по электротехнике, электронной технике, информационным технологиям , автор научной работы — Селиванов Игорь Андреевич, Омельченко Евгений Яковлевич
Текст научной работы на тему «Электромеханические свойства асинхронных двигателей»
Технические решения по ограничению влияния электромагнитных полей. Дружинин Н.Н., Ануфриев А.В., Сарлыбаев А.А.
1. ЖуравлевА.Н., ПоповГВ. Технология телловизионного контроля в диагностике силовых трансформаторов // Энергетик. 2000. № 2. С. 34-35.
2. КирееваЭ.А. Диагностика силовых трансформаторов // Электрооборудование. 2008. № 9. С. 59-64.
3. Алексеев Б. А. Контроль состояния (диагностика) крупных силовых трансформаторов. М.: Изд-во НЦ ЭНАС, 2002. 216 с.
1. Zhuravlev A.N., Popov G.V. Thermal control technology in diagnostic of mains transformers // Power engineerings. 2000. № 2. with. 34-35.
2. Kireeva E.A. Diagnostic of mains transformers // the Electric equipment 2008. № 9. With. 59-64.
3. Alexeys B.A. Control states (diagnostic) of large mains transformers. M: Publishers NTS ENAS, 2002. 216 with.
Селиванов И.А., Омельченко Е.Я.
ЭЛЕКТРОМЕХАНИЧЕСКИЕ СВОЙСТВА АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Асинхронные электродвигатели занимают главенствующее положение в промышленных электроприводах, интенсивно внедряется система «преобразователь частоты — асинхронный двигатель» [1]. Переходные процессы в электроприводах переменного тока более колебательные и значительно сложнее в математическом описании по сравнению с электроприводами по -стоянным током, поэтому вопросы изучения электромеханических свойств асинхронных двигателей при питании отмногофазныхцепей остаются актуальными.
В статье сделана попытка анализа совместного влияния многофазной питающей сети и асинхронного двигателя, выполнен анализ переходных процессов активной и реактивной мощности, потребляемой в многофазной Ь-К цепи при различных вждных напряжениях и частотах, проанализировано влияние коэффициента мощности на качество электромеханических пережд-ных процессов в различныхсистемахэлектропривода.
Учебная литература [2] расчет активной и реактивной мощности для трехфазных цепей дает для установившихся режимов при неизменных напряжении и частоте. В специальной литературе [3] дается расширенное понятие реактивной мощности, но только в установившемся режиме и для нужд электроснабжения. Понятия активной и реактивной мощности связываются с интегральной оценкой за период питающего напряжения. В статье все выводы сделаны для суммарных мгновенных значений активной и реактивной мощности в многофазных цепях [4].
1. Питающее напряжение является симметричным трехфазным напряжением прямой последовательности.
2. Нагрузка в виде последовательных Ь-К цепей соединена в звезду без нулевого провода.
3. Параметры нагрузки по фазам равны и постоянны.
Фазное напряжение в ]-фазе трехфазной цепи
где 01=2я/1 — круговая частота питающего напряжения, рад/е; щ — начальный угол фазы, рад (%=Да, % =Да-2я/3, фс=Ла+2я/3); Да- угол включения нагрузки, рад; ит — амплитуда входного напряжения, В.
Уравнение переходного процесса фазного тока на Ь-К нагрузку
I- () = !тфт(Ц? + (р> — )- япф, — ) • е
где Im=UJZ — амплитуда установившегося значения
тока, A; Z =-JR2 + (Q.1L)2 — полное сопротивление
фазы, Ом; ^=arctg(Q 1L/R — угол сдвига между фазами напряжения и тока в установившемся режиме, рад; T=L/R — постоянная времени цепи нагрузки, с.
Картина переходного процесса тока (1) при различных частотах входного напряжения претерпевает значительные изменения, так как параметры Z и ^1 зависят от частоты. Существенные изменения в картину переходного процесса вносит начальный угол включения нагрузки Да. Остается неизменным время затухания переходного процесса, зависящее только от постоянной времени Т.
Мгновенная активная мощность фазы определяется как произведение мгновенных значений напряжения и тока:
Pj (t) = Uj (t) • i. (t) =
= 0,5 um/Z • (cos^1 -cos(2Q1t + 2^. -^1) — (2)
l/T sin(Q1t + (pj) • sm(^. — q)),
включает в себя постоянную составляющую, переменную составляющую с двойной частотой сети и затухающую переходную составляющую с частотой сети. В общем случае Pj(t) имеет сложный гармонический рисунок и зависит от вждной частоты и напряжения, параметров нагрузки, начальной фазы и угла включения.
Мгновенная активная мощность, потребляемая из трехфазной сети, определяется как сумма мгновенных активных мощностей трех фаз (скалярное произведение трехмерного вектора фазного напряжения на трехмерный вектор тока [5]):
PE(t) = ]T(Uj (t) • ij (t)) =
= Ua (t)ia (t) + Ub (t)4 (t) + uc (t)ic (t) = (3)
= 3/2-U2m/Z • (cos q — cos(Q1t + ^)• e
l/T) = = 3 • U■ I • cos q • (1 — e t/T • cos(Q1t + ^)/cos q),
где U=Um/ -Jl — действующее значение напряжения,
В; I=Um/Z/ -J2 — действующее значение тока в установившемся режиме, A; cos^1=R/Z = 1/^Д+ (TQ1)2 — коэффициент активной мощности.
Особенность поведения активной мощности в трехфазной цепи заключается во взаимной компенсации по трем фазам переменных составляющих двойной частоты, что объясняет отсутствие установившейся переменной составляющей. В переходном процессе затухающая составляющая активной мощности определяется частотой питающей сети, а степень затухания зависит от Т. Используя уравнение прямого преобразования Лапласа, для уравнения (3) рассчитывается передаточная функция в операторном виде
(T2s2 + 24T0 s + 1)
+ 2£T0 s +1) • (0,5Ts +1)
Уравнение (6) отличается от уравнения (4) дополнительным апериодическим звеном с постоянной времени 0,5Г, что говорит о меньшей колебательности РК(/). Большая переменная составляющая в переходном процессе Р^(/) объясняется тем, что она дополнительно расходуется на формирование электромагнитного поля в индуктивности [2].
Мгновенное значение реактивной мощности одной фазы [6] прямо пропорционально мгновенному значению тока, первой производной напряжения и обратно пропорционально частоте питающего напряжения:
= 0,5 • U2m/ Z • (sin^1 — sin(2Q1t + 2^. -^1) —2e
t/T cos(Q1t + (p.) • sin(^. — (pj),
где s — символ операторного изображения Лапласа; T02 = T2 / (1 + (TQ1)2)- постоянная времени колебательного звена; £= 1/^/i + (TQ1)2 — коэффициент колебательности.
Уравнение (4) описывает поведение входной суммарной активной мощности на L-R нагрузке в операторном виде при скачке питающего напряжения и частоты. Характерно, что P^(t), WPs(s) не зависят от начальных углов фаз и момента включения нагрузки А а, т.е. уравнения (3) и (4) описывают общие свойства активной мощности в функции вждного напряжения, частоты и параметров нагрузки. Уравнение (4) включает в себя реальное дифференцирующее звено с постоянной времени Т и колебательное звено второго порядка. По коэффициенту затухания £ = 1 / (T Q1)2 = cos^
видно, что переходный процесс активной мощности при скачке напряжения всегда носит колебательный характер (£ j) — первая
производная питающего напряжения по времени, В/с.
Мгновенное значение суммарной реактивной мощности трехфазной цепи равно сумме реактивных мощностей фаз:
Qe (t) = -7- X (uj (t) • ij (t)) =
= —1 u(t) • ia(t) + ub(t) • ib(t) + Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
Проведем несложные преобразования над уравнениями (3) и (8):
р(/) = 3-и ■ I• 008?! • Нр(/) = 3 ■и1т • 1А(/) /2; | д(/) = з-и, • I • • нв(/) = з-иХт • 1Х(0/ 2,|
где Йр(/), кд(г) — переходные функции активной и реактивной мощности; /А(/), /Х(Г) — значения активной и реактивной составляющих тока.
IA(t) = 2 • PE(t)/Um/3 =лЯ• I • cos(fl ■ hp(t);’ Ix (t) = 2 • Qe(t)/ Um /3 = л/1• I • sin (fl ■ hQ(t).|
торной обмотки, рад/с.
Эквивалентные активные и индуктивные сопротивления, последовательно подключенные к ЭДС главного магнитного потока, равны:
R32 = (R2l + (L^)1 + RuR )R (Lm Ц)1/D4; X32 = (R2i + (LЦ)1 + LmLlQ12)R1 LmQl /D4;
D4 = (R11 RC _ L2Lm^2 )2 + (RCLm + RCL2 + R1Lm^
cos ф — R32 / м +X — ,1 .
Эквивалентные активные и индуктивные сопротивления, последовательно подключенные к напряжению статорной обмотки, равны:
Полный ток нагрузки 1т(/) = ■у//А^)Т/Х(?) является модулем вектора тока в трехфазной вращающейся системе координат с угловой частотой сети. Несложно доказать, что полный ток 1т(/) является уравнением огибающей фазных токов /■(/).
Со стороны питающей сети асинхронный двигатель представляется симметричной трехфазной Ь-К нагрузкой с переменными параметрами, зависящими от механической нагрузки или просадки скорости и от частоты питающего напряжения. В основу анализа электромеханических свойств асинхронных двигателей положена Т-образная схема замещения с параллельным подключением сопротивлений потерь в стали [7]. Комплексные сопротивления элементов схемы замещения:
^(Ц) = к + /Хх =7 к;2 + (О, Ь,)2;
2 2(^^ ^ 2) = К2; + /Х 2 =Ц/ ^ 2>/ К2 + ( ^2 Ь2)2 ,
где 0;=2я/1 — угловая частота питающего напряжения, рад/с; R2;=R2/s=R2Q.;/Q.2 — эквивалентное активное сопротивление роторной обмотки, Ом; ,?=(&;-рп®)/^;= =02Ю; — скольжение асинхронного двигателя; ю — угловая скорость вращения, рад/с; _рп — число пар полюсов статорной обмотки; 0.2=2ж[2 — угловая частота ЭДС ро-
1 — R31 / >/ R31 + ХЭ1 .
По уравнениям (11) и (12) для двигателя 4А180М8У3 (Pn=15 кВт, 5^=2.6%, s^=13%) в формате 3D на рис. 1 построена зависимость коэффициента активной мощности cos^1 в функции отчастоты питающей сетиf и частотыроторнойЭДС/2. На рисунке выделены зоны: Г — генераторный режим работы; Дв — двигательный режим; Пр — режим противовключения; 1 — первая зона регулирования fi 50 Гц).Зависимость cos^1 от выделенных частот представляется сложной, изогнутой поверхностью. Максимальные значения функция принимает в диапазоне частот f2 от 0.26 до 6.5 Гц (двигательный режим работы — рабочий участок характеристики). Минимальные значения функция принимает в генераторном режиме в диапазоне частотf от -0.26 до -6.5 Гц. Пунктирной линией выделено поведение cosщ при прямом пуске от сети (/1=50 Гц; 0/ Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
Статические и динамические коэффициенты передачи
Но- мер урав- нения Обоз- наче ние Выходная переменная Статический коэффициент Передаточная функция динамического звена
4 Wpz(s) Px(s) 3R/(2Z2) (7S+1)/(Tg2s2+2^Tg+1)
б Wpr(s) Pr(s) 3R/(2Z2) (7s+1)/(TG2s2+2^TG+1)/(G,57s+1)
9 Qy. (s) 3Q L/(2Z2) 1/(Tg2 s2+2^To+1)
Рис. 1. Зависимость соэ^1 в функции от частоты питающей сети/ и частоты роторной ЭДС/
Таблица 2 Значения cos^1 от скольжения
s, % 100 50 13 2.б 0.52 0
cos^i 0.3 0.39 0.75 0.82 0.б8 0.084
Момент Ми мк Mn 0.2Mn 0
Полное подтверждение вышесказанному можно найти, анализируя переходные процессы прямого пуска на жшостом ходу двигателя 4А180М8У3 от сети (рис. 2)
[8]. Броски момента при пуске (рис. 2, а) дождят до 4М^, колебательность момента и угловой скорости существенно снижается в диапазоне угловых скоростей от 60 до 80 1/с (рис. 2, б) и колебательность снова возрастает при малых моментахдвигателя.
Снизить колебательность момента при пуске возможно двумя способами:
1. Формирование начальных условий для напряжения и мощности, исключающих переменную составляющую момента.
2. Применение тиристорного устройства плавного пуска, формирующего линейное нарастание напряжения на статорной обмотке при пуске.
Первый способ связан с формированием моментов подключения статорных обмоток к фазам питающего напряжения [8]. На рис. 2, в приведены переходные процессы прямого пуска двигателя 4А180М8У3 при последовательном подключении обмоток статора к фазам А, В, С с задержками 1.66, 6.66, 1.66 мс. Пуск с 0 до номинальной скорости происходит практически без дополнительных колебаний (рис. 2, г).
Второй способ ограничивает скорость нарастания питающего напряжения во время пуска, тем самым снижает колебательность в начале переходного процесса. Первый способ может быть легко реализован на основе устройств плавного пуска.
Система электропривода «преобразователь частоты — асинхронный двигатель» формирует на статорной обмотке частоту от 0 до 2-3при частоте роторной ЭДС, изменяющейся от 2.5 до -2.5 Гц (см. рис. 1, заштрижванная область). В этом случае при аЬ$(М)>0.7М^ со$^>0.7, т.е. в разомкнутой системе ПЧ-АД со скалярным управлением следует ожидать повышенную колебательность электропривода, вызванную свойствами многофазной питаю -щей сети, только при работе электродвигателя на холостом ходу.
1. Ильинский Н.Ф. Электропривод в современном мире // АЭП 2007:
Труды V Международной(XVI Всероссийской) конференции по автоматизированному электроприводу. СПб., 2007.
Рис. 2. Переходные процессы пуска на холостом ходу (а, в) и динамические механические характеристики (б, г) двигателя 4А180М8У3
2. НейманЛ.Р., ДемирчанК.С. Теоретические основы электротехники. Л.: Энергия, 1987.
3. Мельников Н.А. Реактивная мощность в электрических сетях. М.: Энергия, 1975.
4. Омельченко Е.Я. Мощностьпри переходных процессах втре Надоели баннеры? Вы всегда можете отключить рекламу.
Основные теоретические положения
Важное свойство ДПТ с независимым возбуждением от постоянных магнитов состоит в том, что результирующий момент сил от всех проводников якоря, называемый электромагнитным моментом двигателя M, пропорционален току якоря Iя, потребляемому двигателем от источника питания:
 ,
,
где k m — коэффициент пропорциональности, называемый постоянной момента двигателя. Его размерность [Нм/А]. По законам электромагнитной индукции в проводнике, движущемся в магнитном поле, возникает электродвижущая сила. Суммарная ЭДС катушек якоря E через коллектор и щетки прикладывается к внешним выводам двигателя. В двигательном режиме работы эта ЭДС направлена против внешнего напряжения U я, подведенного к якорю от источника питания. Поэтому ЭДС двигателя часто называется противоЭДС. Она прямо пропорциональна угловой скорости вращения вала двигателя w дв[рад/с]:
 ,
,
где k ω — коэффициент пропорциональности, называемый постоянной ЭДС двигателя. Его размерность [Вс/рад].
Природа электромагнитных явлений в ДПТ такова, что если используется система единиц СИ, то значения коэффициентов k ω и km численно равны.
Уравнения, описывающие электрические процессы в ДПТ
В электрической якорной цепи двигателя протекает ток I я под действием напряжения постоянного тока Ua источника питания и противоЭДС двигателя.
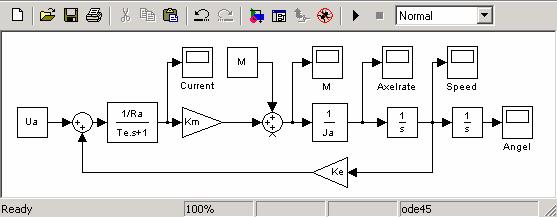
 Рис. 1
Рис. 1
Эта цепь характеризуется параметрами: активным сопротивлением R я [Ом] и индуктивностью L я [Гн] якорной обмотки. Вращающийся ротор, обладающий моментом инерции Ja [Нм с 2 /рад] , приводится в движение одновременным действием электромагнитного момента двигателя M дв и момента внешних сил M вн, приложенного к валу двигателя.
Исходные дифференциальные уравнения ДПТ составляются на основании законов физики. Для электрической цепи используется второй закон Кирхгофа, согласно которому можно записать уравнение
 ,
,
где член R я I я характеризует падение напряжения на активном сопротивлении якорной цепи в соответствии с законом Ома, а член L я ( dI я/ dt ) отражает наличие ЭДС самоиндукции, возникающей в обмотке при изменении тока якоря. В представленном уравнении не учитывается падение напряжения на щетках, зависящее нелинейно от тока якоря, но имеющее, как правило, относительно небольшое значение по сравнению с напряжением U я .
Дифференциальное уравнение, характеризующее процессы в механической части двигателя, составляется на основании второго закона Ньютона:
 ,
,
где M вн — момент внешних сил, действующий относительно оси вращения вала двигателя. В этом уравнении не учитывается действие сил трения, возникающих при вращении ротора, но оказывающих относительно слабое действие на ускорение вала ДПТ.
Используя вышеприведенные формулы и приводя дифференциальные уравнения к нормальной форме Коши, получим описание ДПТ в форме:
Для исследования процессов с помощью ЭВМ удобно использовать структурное представление математической модели ДПТ. Для этого преобразуем полученную систему линейных дифференциальных уравнений по Лапласу при нулевых начальных условиях. В результате получим систему алгебраических уравнений:
в которых s — переменная Лапласа, а величины I я( s ), w дв( s ), U я( s ), M вн( s ) — изображения по Лапласу переменных I я , w дв, U я, M вн соответственно. После эквивалентных преобразований эти уравнения могут быть представлены в форме:
где Тэ = L я / R я — электромагнитная постоянная времени якорной цепи двигателя.
По уравнениям с помощью системы SIMULINK может быть сформирована структурная схема ДПТ для его математического моделирования (рис.1).
Важным параметром ДПТ, определяющим его динамические свойства, является электромеханическая постоянная времени двигателя:
 .
.
Зависимость между электромагнитным моментом двигателя и частотой вращения ротора в установившемся режиме при постоянных U я и M вн называется механической характеристикой двигателя. Уравнение механической характеристики имеет вид:
 .
.
При пуске двигателя, когда скорость равна нулю, развивается пусковой момент
 .
.
Частота вращения вала двигателя при отсутствии сопротивления называется частотой вращения холостого хода
 .
.
Асинхронный двигатель
Среди устройств, преобразующих электрическую энергию в механическую, несомненным лидером является трехфазный асинхронный двигатель – простой и надежный в эксплуатации агрегат. Благодаря своим качествам, он получил широкое применение в промышленности и других областях, где используются механизмы. Название двигателя связано с основным принципом его работы. У этих устройств магнитное поле статора вращается с частотой, превышающей частоту вращения ротора. Работа агрегата осуществляется от сети переменного тока.
- Где применяются
- Устройство асинхронного двигателя
- Принцип работы
- Что такое скольжение
Где применяются
Асинхронные двигатели активно используются во многих отраслях промышленности и сельского хозяйства. Они потребляют примерно 70% всей энергии, предназначенной для преобразования электричества во вращательное или поступательное движение. Асинхронные двигатели зарекомендовали себя наиболее эффективными в качестве электрической тяги, без которой не обходятся многие технологические операции.
Асинхронные двигатели обладают множеством положительных качеств. Простая конструкция позволяет изготавливать наиболее дешевые и надежные устройства. Минимальные расходы по эксплуатации обеспечиваются отсутствием скользящего узла токосъема, что одновременно повышает и надежность агрегата.
Данный тип электродвигателей может быть трехфазным или однофазным, в зависимости от количества питающих фаз. В случае необходимости и при соблюдении определенных условий, трехфазный агрегат может питаться и работать от однофазной сети. Эти устройства применяются не только в промышленности, но и в бытовых условиях, а также на садовых участках или домашних мастерских. Однофазные двигатели обеспечивают работу и вращение вентиляторов, стиральных машин, небольших станков, водяных насосов и электроинструмента.
Для нормального действия асинхронного агрегата необходимо выбирать наиболее рациональную схему управления. Трехфазный двигатель будет работать в однофазном режиме при условии правильного расчета конденсаторов, выбора типа и сечения проводов, аппаратуры защиты и управления.
Устройство асинхронного двигателя
Понятие асинхронный означает не совпадающий по времени, неодновременный. В связи с этим, ротор такого двигателя вращается с частотой, меньшей чем частота вращения электромагнитного поля статора.
Подобное отставание называется скольжением и обозначается символом S в формуле, применяемой для расчетов:
- S = (n1 – n2)/n1 – 100%, где n1 является синхронной частотой магнитного поля статора, а n2 – частотой вращения вала.
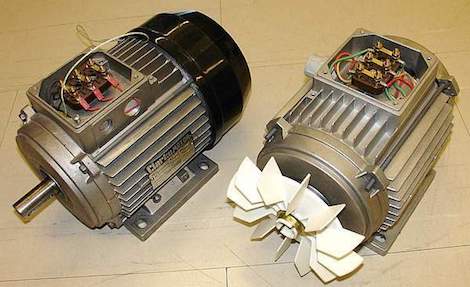
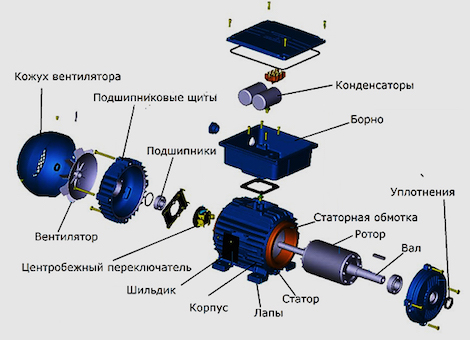
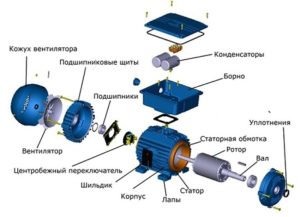
Конструктивно, стандартный асинхронный электродвигатель включает в себя следующие элементы и детали:
- Статор с обмотками. Эту функцию также может выполнять станина, внутри которой помещается статор с обмотками.
- Короткозамкнутый ротор. Если используется фазный – он может называться якорем или коллектором.
- Подшипники различного типа – качения или скольжения. На двигателях повышенной мощности в передней части установлены крышки для подшипников с уплотнениями.
- Металлический или пластмассовый охлаждающий вентилятор, помещенный в кожух с прорезями для подачи воздуха.
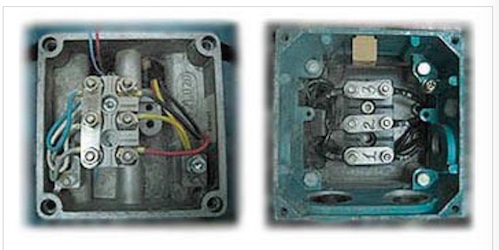
- Подключение кабелей осуществляется с помощью клеммной коробки.
Данные конструктивные элементы могут незначительно изменяться, в зависимости от модификации электродвигателя.
Как уже отмечалось, асинхронные двигатели бывают трехфазными или однофазными. Первый вариант, в свою очередь, выпускается с короткозамкнутым или фазным ротором. Наибольшее распространение получили трехфазные асинхронные электродвигатели с короткозамкнутым ротором, поэтому их следует рассмотреть более подробно.
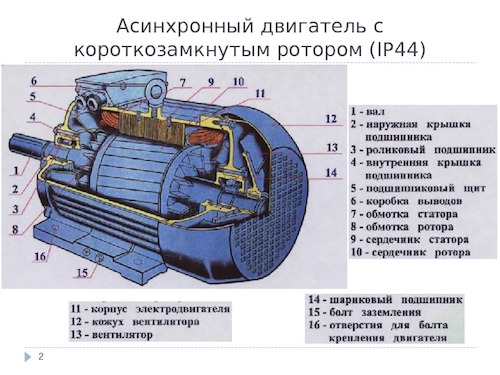
Статор обладает круглой формой и собирается из специальных стальных листов, изолированных между собой. В результате, конструктивно образуется сердечник с пазами, в которые укладываются обмотки. Для этих целей используется обмоточный медный провод, изолированный лаком. В мощных агрегатах обмотки делаются в виде шины. При укладке они сдвигаются между собой на 120 градусов. Соединение осуществляется по схеме звезды или треугольника.
Конструкция самого короткозамкнутого ротора изготавливается в виде вала с надетыми на него стальными листами. Этот набор листов образует сердечник с пазами, заливаемые расплавленным алюминием. Равномерно растекаясь по пазам, алюминий образует стержни, края которых замыкают алюминиевые кольца.
Фазный ротор состоит из вала с сердечником и трех обмоток. С одного конца они соединяются звездой, а с другого – соединяются с токосъемными кольцами, на которые с помощью щеток подается электрический ток. Во время запуска образуется большой пусковой ток асинхронного двигателя. Его можно уменьшить путем добавления к фазным обмоткам нагрузочного реостата.
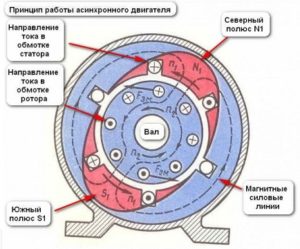
Принцип работы
Устройство и конструктивные особенности асинхронного двигателя определяют и принцип действия данного агрегата. Когда на обмотку статора подается напряжение, в ней образуется магнитное поле. Такая подача напряжения приводит к изменениям магнитного потока и всего магнитного поля статора. Измененные магнитные потоки поступают к ротору, приводят его в действие, после чего он начинает вращаться. Для того чтобы статор и ротор работали асинхронно, требуется, чтобы значения напряжения и магнитного потока были равны переменному току, используемому в качестве источника питания.
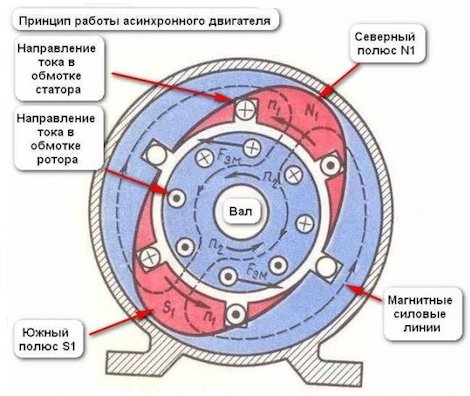
Сам двигатель работает следующим образом:
- Вращающееся магнитное поле воздействует на короткозамкнутую обмотку, специально приспособленную для вращения.
- Поле пересекает проводники роторной обмотки, индуктируя в них электродвижущую силу.
- Под воздействием силы в проводниках ротора начнется течение электрического тока, взаимодействующего с вращающимся магнитным полем. Это приводит к появлению электромагнитных сил, воздействующих на обмотку ротора.
- В сумме, действия приложенных сил вызывают появление вращающего момента, приводящего во вращение ротор в направлении магнитного поля.
Величина индуктированной ЭДС зависит от частоты пересечения проводников вращающимся магнитным полем. То есть, чем выше разница между n1 и n2, тем больше будет величина ЭДС. Ротор будет вращаться с частотой n2, которая всегда будет отставать от синхронной частоты поля статора n1. Эта разница между обеими частотами и будет частотой скольжения ∆n= n1- n2. Данное неравенство является необходимым условием появления электромагнитного вращающегося момента в асинхронном двигателе. Поэтому агрегат так и называется, поскольку вращение ротора происходит несинхронно с полем статора.
Что такое скольжение
Понятие скольжения представляет собой отношение частоты вращения к частоте поля. Данная величина S берется в процентном отношении от частоты вращения магнитного поля. В соответствии с формулой, рассмотренной ранее, частота вращения ротора, определяемая с помощью скольжения составит: n2 = n1 x (1 – S).
Ротор асинхронного двигателя вращается в том же направлении, что и его магнитное поле. В свою очередь, направление вращения поля зависит от последовательности фаз трехфазной сети. Изменить направление вращения ротора возможно за счет изменения направления вращения поля, создаваемого статором. В этом случае изменяется порядок поступления импульсов тока к отдельным обмоткам. В случае необходимости может быть задано вращение по часовой или против часовой стрелки.
Важным моментом считается пуск асинхронного двигателя, при котором происходит пересечение обмотки ротора вращающимся магнитным полем. В результате, индуктируется большая ЭДС, создающая высокий пусковой ток. Подобное состояние компенсируется специальной нагрузкой, снижающей скорость вращения ротора.

Синхронный и асинхронный двигатель
Работа асинхронного двигателя в генераторном режиме
Асинхронный двигатель с короткозамкнутым ротором схема
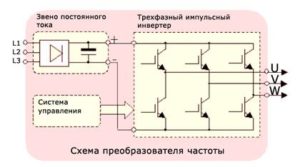
Принцип работы частотного преобразователя для асинхронного двигателя
Трехфазный асинхронный двигатель
 Электрические двигатели — устройства, преобразовывающие электроэнергию, получаемую из распределительных сетей, в механическую энергию вращения. В состав любого двигателя входят следующие элементы: корпус для защиты от попадания пыли и влаги, неподвижная часть (статор), жестко прикрепленная к корпусу, неподвижные обмотки и магнитопроводы, часть, которая вращается (ротор). Ротор насаживается на вал, вращаемый в двух подшипниковых узлах. Конец выходит наружу, имеет канавку, где закрепляются шкивы или шестерные привода.
Электрические двигатели — устройства, преобразовывающие электроэнергию, получаемую из распределительных сетей, в механическую энергию вращения. В состав любого двигателя входят следующие элементы: корпус для защиты от попадания пыли и влаги, неподвижная часть (статор), жестко прикрепленная к корпусу, неподвижные обмотки и магнитопроводы, часть, которая вращается (ротор). Ротор насаживается на вал, вращаемый в двух подшипниковых узлах. Конец выходит наружу, имеет канавку, где закрепляются шкивы или шестерные привода.
- Работа трехфазных электродвигателей
- Асинхронные двигатели
- Особенности трехфазных асинхронных двигателей
Узлы подшипников располагаются в пределах двух съемных крышек, закрывающих корпус с торцов, стягиваются между собой с помощью длинных шпилек (трех-четырех). В задней части вала размещена крыльчатка вентилятора, который обдувает и охлаждает обмотки.
Конструкция таких устройств отличается удобством обслуживания и проведения ремонта — их легко разобрать и собрать.
Асинхронные двигатели бывают однофазными и трехфазными. Первые применяются преимущественно до мощности 2,2 кВт. Ограничение действует из-за большого пускового и рабочего тока. Принцип действия одинаковый, но у однофазных более низкий пусковой момент.
Работа трехфазных электродвигателей
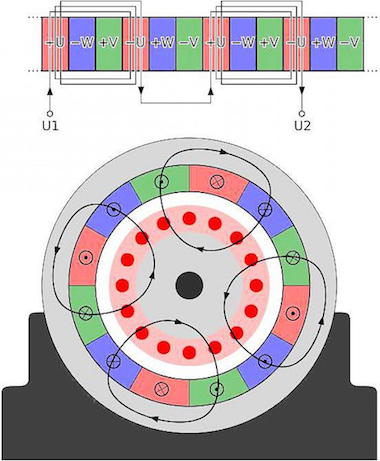
 Самое главное достоинство трехфазной системы электроснабжения состоит в том, что создается электрическое поле, имеющее способность вращаться. Если на неподвижном статоре располагаются три обмотки с магнитомягкими (материалы, способны с легкостью перемагничиваться) сердечниками, а в дальнейшем происходит подача напряжения последовательно от каждой из фаз, то сердечники постепенно намагничиваются от поступающего тока и создают магнитное поле, перемещающееся в пределах окружности.
Самое главное достоинство трехфазной системы электроснабжения состоит в том, что создается электрическое поле, имеющее способность вращаться. Если на неподвижном статоре располагаются три обмотки с магнитомягкими (материалы, способны с легкостью перемагничиваться) сердечниками, а в дальнейшем происходит подача напряжения последовательно от каждой из фаз, то сердечники постепенно намагничиваются от поступающего тока и создают магнитное поле, перемещающееся в пределах окружности.
Асинхронный трехфазный электродвигатель применяется в разных отраслях промышленности и в сельском хозяйстве.
Скорость вращения магнитного поля в статоре можно легко снизить, используя чисто конструктивные методы, к примеру, увеличив число обмоток на окружности вдвое (из трех до шести).
Асинхронные двигатели
Изобретатель М. О. Доливо-Добровольский придумал, как можно усовершенствовать двигатель избавившись от коллекторов, имеющих ряд недостатков. Так, он предложил обмотку ротора выполнять в виде короткозамкнутых витков, ток в которых будет заводить переменное магнитное поле статора. Внешне такое решение представляет собой два кольца, соединенных между собой поперечными проводниками, — «бельчье колесо». Такой устройство еще называется двигателем с короткозамкнутым ротором.
Принцип действия примерно следующий: при запуске переменное поле статора возбудит в проводниках сильный ток, что приведет к намагничиванию сердечника ротора, он будет притянут статорными магнитами и начнет вращение. Чтобы ток стабильно появлялся в замкнутых витках, необходимы постоянные колебания магнитного поля, поэтому ротор вращается медленнее магнитного поля. Именно от такого «запаздывания» двигатели начали называть асинхронными, а разница вращений — скольжение.
Скольжение является переменной величиной. При запуске оно достигает максимальных значений, постепенно уменьшаясь и достигая минимальных значений на холостом ходу (примерно 3%). Если есть нагрузка на вал, скольжение пропорционально увеличивается и возрастает вместе с нагрузками (около 7%).
Особенности трехфазных асинхронных двигателей
Конструкция этого типа оказалась настолько удачной, что большинство электроприводов всего мира производятся на базе трехфазных асинхронных устройств, имеющих короткозамкнутый ротор. Они имеют ряд преимуществ, в частности, обладают:
-

 Исключительной простотой, надежностью и долговечностью;
Исключительной простотой, надежностью и долговечностью;
- Удобством обслуживания и ремонта;
- Возможностью изменять направление вращения ротора. Для это нужно всего лишь переключить два любые фазные провода;
- Возможностью работы в качестве генератора: при применении электромагнитного торможения мотор начнет отдавать энергию в сеть.
Простота переключения фазных проводов может быть как преимуществом, так и недостатком. Производя замену силового кабеля, нужно особое внимание уделять оборудованию, запомнить, как оно ранее было подключено. Делая монтаж, следует обязательно перепроверить на запасном двигателе фазировку проводов, ведь оборудование может запросто выйти из строя, если сделана неверная фазировка.
Слабые стороны асинхронного трехфазного двигателя:
- Значительный пусковой ток, превышающий номинальный примерно в 5 раз. Это значит, что нужно устанавливать защитные автоматы двигателей только класса D.
- Малый момент на валу при запуске. При значительной инерции понадобится двигатель большей мощности.