Что такое clock в шаговом двигателе
990x.top
Простой компьютерный блог для души)
Memory Clock в MSI Afterburner — что это? (сколько ставить)
 Разгон комплектующих персонального компьютера позволяет увеличить производительность без покупки новых устройств. Однако при несоблюдении условий разгона — из-за повышения температуры можете уменьшить срок службы разогнанных устройств.
Разгон комплектующих персонального компьютера позволяет увеличить производительность без покупки новых устройств. Однако при несоблюдении условий разгона — из-за повышения температуры можете уменьшить срок службы разогнанных устройств.
Memory Clock в MSI Afterburner — что это такое?
Отвечает за изменение частоты видеопамяти (VRAM) при разгоне видеокарты (GPU).
Является опцией, позволяющая регулировать частоту видеопамяти графического адаптера. Значение частоты можно указать вручную (цифрами) или использовать ползунок (данная особенность возможно зависит от модели GPU).
Опция присутствует также и в другом похожем софте, например ASUS GPU Tweak, Gigabute OC Guru.
Core Clock — изменение частоты видеочипа.
MSI Afterburner — фирменная утилита для разгона видеокарт, позволяющая изменять частоту памяти, видеоядра, скорость вращения вентиляторов, лимит потребляемой мощности, напряжение ядра.

Данный параметр, а также другие стоит изменять только при наличии соответствующего опыта — настройки изменяют работу устройства на аппаратном уровне.
Memory Clock можно изменить двумя вариантами:
- Двигая ползунок мышкой.
- Кликнуть по цифре в конце, задав вручную значение.
После изменения — необходимо нажать кнопку Применить (в виде галочки), находится внизу:

При разгоне изменять ползунок Memory Clock нужно плавно, с шагом например 50 МГц. Разгон осуществляется примерно так:
- Запускаем FurMark (специальный тест видеокарты), указываем настройки > кликам GPU Stress Test.
- Появится окно с движущимся обьектом.
- Левый верхний угол будет содержать показатель ФПС (количество кадров в секунду).
- Оставляем работающую программу на несколько минут.
- После — заново запускаем тест, постепенно увеличивая значение Memory Clock с шагом 50 МГц каждые 5 минут.
- Анализируем движение обьекта в окне программы. При появлении помех, артефактов, фризов, когда тест FurMark закрылся — означает достигнут предельный максимум. Тогда — снижаем текущее значение частоты на 50 Мгц, после — дополнительно тестируем 20 минут. При отсутствии лагов/глюков — оставляем данные настройки (сохраняем). При проблемах — повторно снижаем еще на 50 Мгц, далее тестируем. Задача — найти оптимальное значение.
Примерно таким же образом разгоняется видеочип (настройка Core Clock). Значение увеличивать необходимо на 20 Мгц. Тестируем, пока не получим стабильную картину. Однако рекомендовано от стабильных значение еще отнять 50-80 Мгц для страховки.
Заключение
- Memory Clock в MSI Afterburner — настройка, позволяющая изменить частоту видеопамяти видеокарты.
Представленная информация — базовая. Разгон подразумевает наличие некоторых знаний/опыта или штудированию специализированных форумов (например Overclockers).
Что такое шаговый двигатель, зачем он нужен и как работает
Шаговые двигатели постоянного тока получили широкое распространение в станках с числовым программным управлением и робототехнике. Основным отличием данного электромотора является принцип его работы. Вал шагового электродвигателя не вращается длительное время, а лишь поворачивается на определенный угол. Этим обеспечивается точное позиционирование рабочего элемента в пространстве. Электропитание такого двигателя дискретное, то есть осуществляются импульсами. Эти импульсы и поворачивают вал на определенный угол, каждый такой поворот называется шагом, отсюда и пошло название. Зачастую данные электромоторы работают в тандеме с редуктором для повышения точности установки и момента на валу, и с энкодером для отслеживания положения вала в текущий момент. Эти элементы необходимы для передачи и преобразования угла вращения. В этой статье мы расскажем читателям сайта Сам Электрик об устройстве, принципе работы и назначении шаговых двигателей.
- Как устроен шаговый двигатель
- Принцип действия
- Виды и типы по полярности или типу обмоток
- Типы двигателей по конструкции ротора
- Управление ШД
- Достоинства и недостатки шаговых электродвигателей
Как устроен шаговый двигатель
По своему типу это бесколлекторный синхронный электродвигатель. Состоит из статора и ротора. На роторе обычно расположены секции, набранные из листов электротехнической стали (на фотографии это «зубчатая» часть), а те, в свою очередь, разделены постоянными магнитами. На статоре расположены обмотки, в виде отдельных катушек.

Принцип действия
Как работает шаговый электродвигатель можно рассмотреть на условной модели. В положении 1 на обмотки А и В подается напряжение определенной полярности. В результате в статоре образуется электромагнитное поле. Так как разные магнитные полюса притягиваются, ротор займет свое положения по оси магнитного поля. Более того, магнитное поле мотора будет препятствовать попыткам изменения положения ротора извне. Если говорить простыми словами, то магнитное поле статора будет работать на то, чтобы удержать ротор от изменения заданного положения (например, при механических нагрузках на вал).
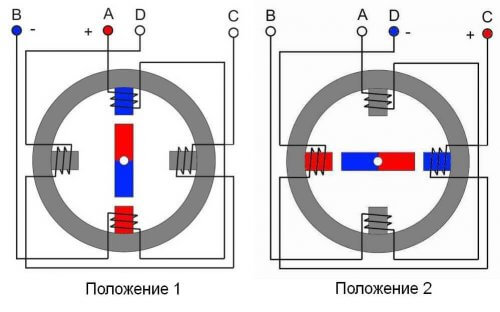
Если напряжение той же полярности подается на обмотки D и C, электромагнитное поле сместится. Это заставит повернуться ротор с постоянным магнитом в положение 2. В этом случае угол поворота равен 90°. Этот угол и будет шагом поворота ротора.
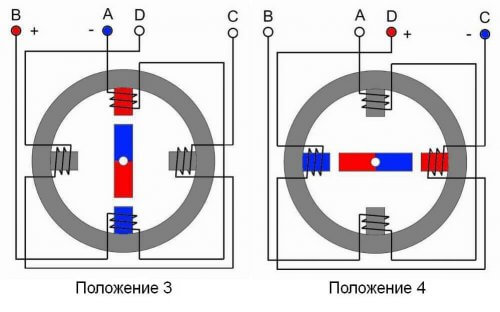
Положение 3 достигается подачей напряжения обратной полярности на обмотки А и В. В этом случае электромагнитное поле станет противоположным положению 1, ротор двигатели сместится, и общий угол будет 180°.
При подаче напряжения обратной полярности на обмотки D и C, ротор повернется на угол до 270° относительно начальной позиции. При подключении положительного напряжения на обмотки А и В ротор займет первоначальное положение — закончит оборот на 360°. Следует учитывать, что передвижение ротора происходит по наименьшему пути, то есть из положения 1 в положение 4 по часовой стрелке ротор повернется только после прохождения промежуточных 2 и 3 положения. При подключении обмоток после 1 положения сразу в 4 положение ротор повернется против часовой стрелки.
Виды и типы по полярности или типу обмоток
В шаговых двигателях применяются биполярные и униполярные обмотки. Принцип работы был рассмотрен на базе биполярной машины. Такая конструкция предусматривает использование разных фаз для питания обмоток. Схема очень сложна и требует дорогостоящих и мощных плат управления.
Более простая схема управления в униполярных машинах. В такой схеме начало обмоток подключены к общему «плюсу». На вторые выводы обмоток поочередно подается «минус». Тем самым обеспечивается вращение ротора.
Биполярные шаговые двигатели более мощные, крутящий момент у них на 40% больше чем в униполярных. Униполярные электромоторы гораздо более удобны в управлении.

Типы двигателей по конструкции ротора
По типу исполнения ротора шаговые электродвигатели подразделяются на машины:
- с постоянным магнитом;
- с переменным магнитным сопротивлением;
- гибридные.
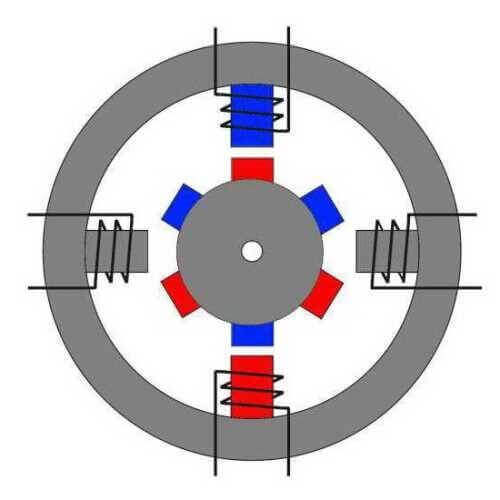
ШД с постоянными магнитами на роторе устроен также, как и в рассмотренных выше примерах. Единственным отличием является то, что в реальных машинах количество магнитов гораздо больше. Распределены они обычно на общем диске. Количество полюсов в современных моторах доходит до 48. Один шаг в таких электромоторах составляет 7,5°.
Электромоторы с переменным магнитным сопротивлением. Ротор данных машин изготавливается из магнитомягких сплавов, их также называют «реактивный шаговый двигатель». Ротор собирается из отдельных пластин и в разрезе выглядит как зубчатое колесо. Такая конструкция необходима для того, чтобы через зубцы замыкался магнитный поток. Основным достоинством такой конструкции является отсутствие стопорящего момента. Дело в том, что ротор с постоянными магнитами притягивается к металлическим деталям электромотора. И провернуть вал при отсутствии напряжения на статоре достаточно тяжело. В шаговом двигателе с переменным магнитным сопротивлением такой проблемы нет. Однако существенным минусом является небольшой крутящий момент. Шаг подобных машин обычно составляет от 5° до 15°.

Гибридный ШД был разработан для объединения лучших характеристик двух предыдущих типов. Такие двигатели имеют маленький шаг в пределах от 0,9 до 5°, обладают высоким моментом и удерживающей способностью. Самым важным плюсом является высокая точность работы устройства. Такие электромоторы применяются в самом современном высокоточном оборудовании. К минусам можно отнести только их высокую стоимость. Конструктивно ротор данного устройства представляет собой намагниченный цилиндр, на котором расположены магнитомягкие зубцы.
Для примера в ШД на 200 шагов используются два зубчатых диска с числом зубцов 50 штук на каждом. Диски смещены относительно друг друга на ползуба так, что впадина положительного полюса совпадает с выступом отрицательного и наоборот. Благодаря этому у ротора есть 100 полюсов с обратной полярностью.
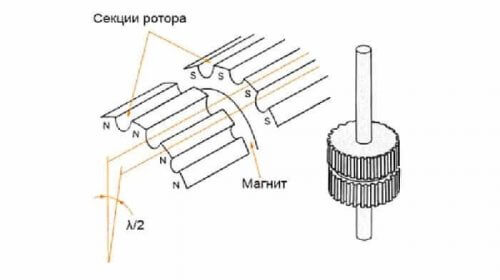
То есть и южный, и северный полюс может сместиться относительно статора в 50 различных положений, а в сумме 100. А смещение фаз на четверть дает еще 100 позиций, производится это за счет последовательного возбуждения.

Управление ШД
Управление производится следующими методами:
- Волновой. В данном методе напряжение подается только на одну катушку, к которой и притягивается ротор. Так как задействована только одна обмотка крутящий момент ротора небольшой, и не подходит для передачи больших мощностей.
- Полношаговый. В данном варианте возбуждаются сразу две обмотки, благодаря чему обеспечивается максимальный момент.
- Полушаговый. Объединяет первые два метода. В данном варианте напряжение подается сначала на одну из обмоток, а затем на две. Таким образом реализуется большее количество шагов, и максимальная удерживающая сила, которая останавливает ротор при больших скоростях.
- Микрошаговое регулирование производится подачей микроступенчатых импульсов. Такой метод обеспечивает плавное вращение ротора и снижает рывки при работе.
Достоинства и недостатки шаговых электродвигателей
К достоинствам данного типа электрических машин можно отнести:
- высокие скорости пуска, остановки, реверса;
- вал поворачивается в соответствии с командой управляющего устройства на заданный угол;
- четкая фиксация положения после остановки;
- высокая точность позиционирования, без жестких требований к наличию обратной связи;
- высокая надежность за счет отсутствия коллектора;
- поддержание максимального крутящего момента на низких скоростях.
- возможно нарушение позиционирования при механической нагрузке на вал выше допустимой для конкретной модели двигателя;
- вероятность резонанса;
- сложная схема управления;
- невысокая скорость вращения, но это нельзя отнести к весомым недостаткам, поскольку шаговые двигатели не используются для простого вращения чего-либо, как бесколлекторные, например, а для позиционирования механизмов.
Шаговый двигатель также называют «электродвигатель с конечным числом положений ротора». Это и есть наиболее ёмкое и в то же время краткое определение таких электромашин. Они активно применяются в ЧПУ-станках, 3D-принтерах и роботах. Главным конкурентом шагового двигателя является сервопривод, но у каждого из них есть свои преимущества и недостатки, которые определяют уместность использования одного или другого в каждом конкретном случае.
Шаговый двигатель и принцип его работы

Что такое шаговый двигатель?
На сегодняшнее время шаговые двигатели широко используются в различной оргтехнике, автоматическом электроинструменте, в машиностроении и т. д., там, где требуется достаточно высокая точность позиционирования. Не меньшей популярностью пользуются шаговые двигатели и для изготовления самодельных ветрогенераторов.
О том, что такое шаговый двигатель и зачем он нужен, будет рассказано в данной статье строительного журнала samastroyka.ru .
Что такое шаговый двигатель?
Шаговый двигатель — это электромеханическое устройство способное преобразовывать электрический ток в дискретные (состоящие из отдельных частей) угловые перемещения ротора. Благодаря наличию в конструкции шаговых двигателей постоянного магнита, обмотка последнего способна к самовозбуждению, что позволяет использовать шаговый двигатель в качестве основного элемента ветрогенератора, который производит постоянный электрический ток от вращения лопастей под воздействием силы ветра.

Однако основное применение шаговые двигатели получили в машиностроении и в различной оргтехнике. Благодаря высокой точности и простой интеграции с посторонними приложениями цифрового управления, шаговые электродвигатели позволяют легко автоматизировать работу отдельных систем и узлов сложного устройства. Ну а отсутствие таких элементов в конструкции шагового двигателя как щетки, для передачи электроэнергии, сказывается в первую очередь на длительном сроке службы и его довольно продолжительном ресурсе.
Принцип работы шаговых двигателей
Конструкция шаговых двигателей устроена таким образом, что на статоре устройства расположено определенное количество обмоток управления, на которые последовательно подаётся напряжение. Такой подход в работе шаговых электродвигателей позволяет обеспечить дискретное изменение электрического поля внутри шагового электродвигателя и задать нужный угол перемещения оси ротора.

Существуют различные виды шаговых двигателей: однофазные, многофазные и двухфазные, с пассивным либо активным ротором. Для управления шаговым двигателем используется специальный электронный блок управления, который обеспечивает поступление на обмотки электродвигателя определенную последовательность импульсов в зависимости от фазности электродвигателя.
Преимущества и недостатки шаговых электродвигателей
Главным преимуществом шаговых двигателей, является высокая точность поворота ротора на заданный угол. Достичь такого показателя при использовании обычных щёточных электродвигателей попросту невозможно. Как следствие этому, шаговый двигатель — хорошая альтернатива сервоприводу, стоимость которого в разы выше.

Кроме того, неоспоримым преимуществом шаговых двигателей, является и их довольно продолжительный ресурс работы. Целесообразно заметить, что даже за внушительный срок эксплуатации, точность шагового двигателя падает совсем незначительно.
Что же касается недостатков шаговых двигателей, то связаны они, прежде всего с так называемым «проскальзыванием ротора» вследствие значительных нагрузок на вал электродвигателя. В большинстве случаев, избежать подобной проблемы помогает увеличение мощности шагового двигателя или установка специального датчика на своевременное обнаружение подобной проблемы.
Выбор замкнутого контура шагового привода
Большинство систем перемещения на основе шаговых двигателей работают в разомкнутом контуре и поэтому большей частью недороги. По сути, шаговые системы предлагают единственно возможную технологию движения, которая способна осуществлять управление положением без обратной связи. Однако, когда шаговые двигатели работают на нагрузку в разомкнутом контуре, может произойти потеря синхронности заданных и реальных шагов.
Управление по замкнутому контуру – это разновидность традиционного шагового перемещения. Оно является экономичной альтернативой в тех случаях, когда требуется большая надежность, безопасность или гарантия качества. Контур этих шаговых систем замыкается с помощью устройства обратной связи или одного из разнообразных непрямых методов считывания параметров, что дает возможность проверять/контролировать „пропущенные шаги“, определять потерю скорости двигателя и позволяет добиться большей величины вращающего момента. В последнее время управление по замкнутому контуру (CLC) шаговых приводов помогает реализовывать архитектуры распределенного интеллектуального перемещения.
Доступные методы, выгода
В настоящее время есть несколько технологий для осуществления управления по замкнутому контуру положением, скоростью и/или вращающим моментом шагового двигателя. По возрастанию степени управляемости эти технологии располагаются в следующем порядке: подсчет шагов, регистрация обратной электродвижущей силы и полный сервопривод (подробности – на рисунке „Методы CLC“).
Рауль Кулкарни (Rahul Kulkarni), менеджер по продукции и управлению производством в компании National Instruments (NI), говорит о нескольких причинах и сценариях применения управления по замкнутому контуру:
Последнее из перечисленных действий относится к заданию нужных размеров шагового двигателя в соответствии с требованиями нагрузки и инерции системы, на что не всегда обращают внимание.Кулкарни отмечает: „На практике вы можете немного снизить скорость двигателя, чтобы сократить издержки, при условии, что ваше приложение не требует перемещения по определенной траектории. Именно здесь может помочь управление шагом по замкнутому контуру».
Он также поясняет, что все контроллеры перемещения компании NI: NI 733x (только шаговый двигатель), NI 734x и высокопроизводительная модель NI 735x (шаговый двигатель/серводвигатель) можно сконфигурировать для управления шаговым двигателем в замкнутом контуре. В режиме CLC на осях шагового двигателя для обеспечения обратной связи по скорости и положению используются квадратурные кодовые датчики или аналоговые входы.
Джон Мазуркевич (John Mazurkiewicz), менеджер по производству двигателей в Baldor Electric Co. отмечает, что компания рассматривает шаговые двигатели как простые, недорогие механизмы, идеальные для позиционирования нагрузки. Причины, по которым используются шаговые двигатели, включают упрощенную работу (обычно используются в разомкнутом контуре), более легкое согласование вследствие работы с цифровыми входами и более низкую цену, так как обычно они не оснащены устройствами обратной связи.

Intelligent Motion Systems устанавливает дополнительный энкодер на задней части двигателей серии MDrive, это объединяет контроллер перемещения и микрошаговый привод с шаговым двигателями 14, 17 и 34 стандарта NEMA. На рисунке представлено устройство MDrive17
И все же при операциях в разомкнутом контуре существует риск потери шагов, что влечет за собой неправильное позиционирование. „Это может привести к большому объему брака прежде, чем будет обнаружена ошибка, – отмечает Мазуркевич. – Кроме того, при работе шагового двигателя в режиме с максимальным вращающим моментом или с более высоким ускорением в целях повышения производительности, существует риск самопроизвольной остановки двигателя“. Эти традиционные ограничения шагового двигателя можно обойти, если добавить обратную связь.
Шаговые двигатели в замкнутом контуре могут работать с недорогими энкодерами в отличие от тех, что используются в сервосистемах. Это дополнительное преимущество. „Обычно с шаговыми двигателями могут использоваться энкодеры с несимметричным выходом. Не требуется также электронная коммутация сигналов обратной связи“, – отмечает Мазуркевич.
Как показывает опыт компании Baldor, шаговые двигатели CLC особенно полезны при легких нагрузках и очень коротких перемещениях. Типичные промышленные приложения включают двухкоординатные и поворотные устройства позиционирования в системах числового программного управления (ЧПУ), средствах управления процессами, в полиграфии и упаковке.
Компании Parker Hannifin Corp./ Compumotor рекомендуют шаговые электродвигатели с замкнутым контуром для применения там, где требуется стабильность двигателя при нулевой скорости и подтверждение позиции. Джон Вейлвендер (John Walewander), менеджер по проектированию, утверждает: „С этими регулярно возникающими задачами, которые можно назвать первостепенными, хорошо справляются шаговые двигатели“. Вместо использования устройств обратной связи компания Parker сделала большие инвестиции в технологии „без датчиков“ и разработала патентованные цифровые методы, которые выполняют эти задачи без внешних дополнительных устройств.
Эти методы – активное демпфирование и обнаружение самопроизвольной остановки двигателя без помощи энкодера – использованы в микрошаговых электродвигателях семейства Gemini компании Parker. Вейлвендер считает, что дальнейшее развитие этих сложных алгоритмов сделает их более эффективными, так что меньшие по размеру и более дешевые устройства также будут обладать этими преимуществами. Вейлвендер делает следующий вывод: „Поскольку постоянное совершенствование этих возможностей характерно для всего поколения, то обнаружение самопроизвольной остановки двигателя и методы подавления резонанса станут такими же привычными, как и микрошаговые двигатели сегодня“.
Методы управления шаговым перемещением в замкнутом контуре
Согласно мнению представителей компании Incremotion Associates, для управления шаговыми двигателями в замкнутом контуре используются разнообразные методы, среди них: подсчет шагов (или верификация шагов), определение обратной электродвижущей силы без датчиков, полный сервопривод с датчиками обратной связи.
При верификации шагов, самом простом виде контроля позиции, для «подсчета» произведенных шагов используется оптический энкодер с низкими показателями. Простой контур сравнивает число шагов, которое должно было быть произведено с измеренным числом шагов, подтверждая, что шаговый двигатель переместился в нужную позицию.
Как утверждает Дэн Джоунс, президент компании Incremotion, обратная электродвижущая сила (противоЭДС), метод определения без датчиков, использует сигналы противоЭДС двигателя для измерения и управления скоростью. Когда напряжение противоЭДС падает ниже определенного уровня, регулятор «замкнутого контура» переключается на разомкнутый контур для перемещения к окончательной позиции.
Полный сервопривод предполагает постоянное использование энкодера, датчика углового положения или других устройств обратной связи с целью более точного управления положением и вращающим моментом шагового двигателя. Эти устройства поставляются рядом производителей по всему миру.
Компания Parker Hannifin включает активное демпфирование и определение самопроизвольной остановки двигателя без энкодера как варианты управления с помощью противоЭДС. Привод шагового двигателя контролирует и измеряет обороты двигателя и использует информацию о напряжении и токе для совершенствования управления работой двигателя. Активное демпфирование использует эту информацию для ослабления колебаний скорости и позволяет добиться оптимальных показателей вращающего момента. Таким образом, вращающий момент не будет расходоваться на механические колебания (см. рисунок «Вращающий момент – скорость»). При определении самопроизвольной остановки двигателя без энкодера эта информация используется для того, чтобы определить потерю синхронной скорости. Это серьезная проблема при управлении двигателями в разомкнутом контуре.
Боб Пеарент (Bob Parente), технический руководитель прикладных программ в компании Intelligent Motion Systems Inc., говорит: „Шаговые двигатели с замкнутым контуром используются в ответственных приложениях, когда необходимо подтверждение положения“. В качестве примера он приводит автоматический лабораторный химический анализатор/анализатор крови, в котором многочисленные оси перемещаются, чтобы установить тестируемый образец под соответствующий раздаточный автомат реактивов. В это время другие двигатели откатываются назад, загружая точное количество химического реагента, затем продвигаются вперед, чтобы распределить реагенты в определенной последовательности и нужном количестве. Этот процесс аналогичен использованию нескольких шприцев. Пеарент утверждает, что „любая ошибка в позиции любой из осей может привести к потере данных или неточности результатов“.
Оправдывая добавленную стоимость
Дополнительный узел или достижение в разработке означают превышение первоначальной стоимости. Это тот случай, когда небольшое превышение стоимости оправдывается значительным экономическим эффектом.
„Даже при добавленной стоимости устройств обратной связи шаговые двигатели остаются экономически эффективными по сравнению с другими технологиями управления движением в замкнутом контуре, – поясняет Пеарент. – Дополнительная стоимость устройства обратной связи оправдывается гарантией точных результатов. Одна ошибка в важном приложении может стоить столько же, сколько все устройство обратной связи“. Энкодер или датчик углового положения представляют собой честное „страхование“, которое дает уверенность в том, что шаговые двигатели находятся в нужной позиции.
По мнению Baldor, замыкание контура ведет к увеличению точности деталей и повышению качества, так как позволяет сравнивать измеренную позицию с требуемой позицией автомата или системы перемещения. „Если обнаруживается расхождение, принимаются определенные меры, чтобы компенсировать пропущенные шаги двигателя“, – говорит Мазуркевич. Цена и польза, получаемая от устройства обратной связи и использования замкнутого контура, были бы оправданы применением. Далее он отмечает: „Дополнительная стоимость находится в зависимости от требуемых характеристик механизма, его производительности, точности позиционирования и требуемого качества деталей“.
Стоимость материалов в управляемом процессе также влияет на определение цены. Вейлвендер из компании Parker поясняет: „Шаговые двигатели часто используются с очень дорогими материалами – от электронных узлов до образцов ДНК. Возможность неудачи оправдывает дополнительную стоимость обратной связи“. В Parker считают, что для совершенствования управления шаговыми двигателями при снижении затрат выгоды от внедрения технологий „без датчиков“ можно сравнить с технологиями применения обратной связи на основе датчиков. Вейлвендер также отмечает, что „развивается новое поколение цифрового управления шаговыми двигателями, где будет меньше использоваться обратная связь на основе внешних датчиков, что послужит дополнительной экономии в машиностроении“.
Рыночный взгляд
Incremotion Associates, консалтинговая фирма, специализирующаяся в вопросах управления движением, считает, что управление с проверкой шага используется в 8-10% комбинированных шаговых двигателей. Дэн Джоунс (Dan Jones), президент компании Incremotion, предполагает еще меньшее применение других подходов управления по замкнутому контуру в шаговых двигателях: меньше 1% для методов обратной электродвижущей силы и только около 1% рынка – для полного сервоуправления. Однако Джоунс предполагает, что полное сервоуправление будет развиваться быстрее, чем другие стратегии.
Intelligent Motion Systems разделяет это мнение, отмечая, что доля продаж приложений для систем составляет примерно 10%. Чтобы помочь покупателям определиться с выбором систем с замкнутым контуром, Пеарент задает встречные вопросы: „Что происходит с «изделием», если двигатель находится в неверной позиции?“, „Какова стоимость бракованных деталей, которые были произведены из-за неполадок в работе?“. Если издержки приемлемы, систему с разомкнутым контуром можно оставить. Он также отмечает: „Нужно иметь в виду, что в настоящее время 90% всех систем шаговых двигателей работают с разомкнутым контуром“.
Зависимость вращающего момента шагового двигателя от скорости

Источник: Control Engineering на базе данных предоставленных
Parker Hannifin Corp., 2004
Parker Hannifin/Compumotor применяет Active Damping, вид управления «без датчиков» в замкнутом контуре, для оптимального использования вращающего момента шаговых двигателей. Традиционные шаговые системы не могут работать безопаснрго в зоне ограничения вращающего момента
Кулкарни (National Instruments) считает, что рост использования шаговых двигателей с замкнутым контуром управления в производстве полупроводников и биохимической отрасли в 90-е годы прошлого века связан с повышением требований к управлению движением в среде чистых комнат. В те годы бесще точные сервомеханизмы были еще слишком дорогими. „Поэтому инженеры обратились к разработке конфигураций шаговых двигателей в замкнутом контуре в надежде получить результаты, разрабатывая оба направления“, – отмечает он. С тех пор стоимость бесщеточных сервомеханизмов и двигателей значительно снизилась. Кулкарни считает: „На сегодняшний день приложения шаговых двигателей в замкнутом контуре можно охарактеризовать как стабильные или находящиеся на спаде“.
Для компании Baldor это новая сфера деятельности. Компания планирует, что примерно 20% шаговых двигателей стандартов NEMA (Национальной ассоциации электротехнической промышленности) формата 17, 23 и 34 будет использоваться с энкодерами для дальнейшего применения в замкнутом контуре.
Компания Parker Hannifin оценивает, что 10-15% „приложений точных шаговых двигателей“ используют энкодеры. Если же, по мнению Вейлвендера, учесть все промышленные шаговые двигатели, то процент будет значительно ниже. Он также отмечает, что приложения, использующие аппаратуру для замыкания контура, находятся на спаде, а технологии „без датчиков“ – на подъеме.
В Parker полагают, что технологии „без датчиков“ ждет большое будущее. По мере развития этих методов будут совершенствоваться как двигатели с большим числом полюсов (шаговые), так и двигатели с малым числом полюсов (серводвигатели), причем и те и другие будут использоваться как с обратной связью, так и без нее. „Двигатели «без датчиков» найдут применение в скоростных приложениях, где сегодня используются серводвигатели, а двигатели с датчиками будут применяться для позиционирования“, – делает заключение Вейлвендер.