Асинхронный двигатель работает устойчиво если
Электростанции

- Главная
- карта сайта
- статьи
Навигация
- Меню сайта
- Организация эксплуатации
- Электрические схемы
- Турбогенераторы
- Трансформаторы и автотрансформаторы
- Распределительные устройства
- Электродвигатели
- Автоматика
Устойчивость асинхронных и синхронных двигателей
Из предыдущего раздела следует, что нарушение устойчивости (опрокидывание) двигателей может произойти либо при увеличении скольжения, либо при снижении напряжения на шинах, к которым они приключены. Приведенные механические характеристики (см. рис. 6-9) построены при условии поддержания неизменным напряжения на выводах двигателей. Из них можно было бы сделать вывод, что асинхронные двигатели работают с большими запасами устойчивости, так как их рабочее скольжение значительно меньше критического K, а максимальный вращающий момент в 1,7—2,5 раза выше рабочего вращающего момента.
В реальных условиях напряжение на шинах, к которым подключены двигатели, поскольку с изменением их загрузки меняется величина падения напряжения в питающих линиях, трансформаторах или реакторах. Поэтому значения рабочих скольжений и максимального вращающего момента в некоторых режимах работы двигателей могут оказаться близкими к критическим, в результате чего возможно нарушение их устойчивости.
Рассмотрим способы оценки устойчивости двигателей и влияющие на нее факторы.
Упрощенный анализ устойчивости двигателя можно производить построением статических характеристик. Величина тс представляет собой избыток вращающего момента двигателя над моментом сопротивления приводимого механизма, представляет собой небаланс реактивной мощности в точке подключения двигателей и сводится к определению критического напряжения, при котором наступает опрокидывание двигателей. Изменение знака производной происходит при снижении максимального вращающего момента до величины момента сопротивления приводимого механизма. Изменение знака производной происходит при снижении напряжения до критического значения, при котором незначительное увеличение потребляемой двигателями реактивной мощности не может быть покрыто реактивной мощностью генераторов системы, вследствие чего двигатели опрокидываются.
Поскольку процесс нарушения статической устойчивости является длительным, использование статических характеристик не вносит большой погрешности.
Построение расчетных статических характеристик для группы двигателей, приключенных к одним шинам, производится в следующей последовательности.
1. Составляется расчетная схема конкретной сети без учета активных сопротивлений. Асинхронные двигатели вводятся в расчетную схему индуктивными сопротивлениями синхронные двигатели — индуктивными сопротивлениями ПО продольной ОСИ.
2. Расчетная схема приводится к результирующему индуктивному сопротивлению эквивалентного двигателя. Внешние сопротивления (трансформаторы, реакторы, линии) между шинами, куда приключены двигатели, и шинами, можно ввести в сопротивление рассеяния статора двигателя (рис. 6-24). Тогда результирующее сопротивление эквивалентного двигателя в случае подключения одних асинхронных двигателей определяется по формуле а в случае подключений асинхронных и синхронных двигателей — по формуле.
3. Определяются значения критического скольжения и кратности максимального момента эквивалентного двигателя, после чего критическое напряжение, при котором происходит опрокидывание двигателей, подсчитывается по формулам.
При расчетах напряжение в исходном режиме полагаем неизменным, а эквивалентное напряжение сети вычисляем с учетом падения напряжения в сопротивлении внешней сети только от реактивной составляющей тока нагрузки.
Для случая подключения одних асинхронных двигателей а для случая подключения асинхронных и синхронных двигателей (при этом форсировка возбуждения синхронных двигателей не учитывается).
Основными факторами, влияющими на устойчивость асинхронных двигателей, являются их загрузка и наличие внешнего сопротивления сети до шин с = пост.
С увеличением внешнего сопротивления в цепи статора эквивалентного двигателя уменьшаются значения 5К. Несмотря на то что напряжение на генераторах поддерживается на уровне, обеспечивающем номинальное напряжение на шинах, к которым приключены двигатели, запасы устойчивости эквивалентного двигателя снижаются и при некоторых эксплуатационных режимах возможно его опрокидывание.
С увеличением загрузки повышаются значения критического напряжения и нарушение устойчивости работы двигателей происходит при меньших отклонениях напряжения от номинального значения.
Построение статических характеристик Q = QV—QH производится графическим сложением расчетных характеристик реактивной мощности, посылаемой генераторами к двигателям, и реактивной мощности, потребляемой двигателями.
Реактивную мощность, посылаемую генераторами к шинам, где приключены двигатели, без учета регуляторов возбуждения можно определить по приближенной формуле. Формулы для построения расчетных характеристик даны в предыдущем параграфе.Статическая устойчивость асинхронных двигателей
Схема замещения асинхронного двигателя приведена на рис. 2.9,а. Для определения потребляемой асинхронным двигателем активной и реактивной мощности воспользуемся упрощенной схемой замещения (рис. 2.9,б), в которой ветвь намагничивания, потребляющая относительно небольшой ток, вынесена на вход двигателя.

Рис. 2.9. Схемы замещение асинхронного двигателя, питающегося от мощной системы: а – исходная; б – упрощенная
На упрощенной схеме замещения двигателя приняты следующие обозначения:
хк – сумма индуктивного сопротивления обмотки статора х1 и приведенного к статору индуктивного сопротивления обмотки ротора х’2;
хμ – сопротивление ветви намагничивания;
r’2 – активное сопротивление ротора, приведенное к обмотке статора, при стоящем двигателе;
s =
 – скольжение ротора относительно поля статора;
– скольжение ротора относительно поля статора;w и w – синхронная частота вращения (частота вращения поля статора) и реальная частота вращения ротора, 1/c;
n и n – механическая номинальная и реальная скорости вращения, об/мин.
Для схемы замещения рис. 2.9,б активная мощность, потребляемая двигателем, определяется выражением
 (2.9)
(2.9)Определим максимум этой характеристики, для чего приравняем к нулю производную от мощности по скольжению
 =0. Проведя необходимые преобразования, получим
=0. Проведя необходимые преобразования, получим при
при  , (2.9a)
, (2.9a)где sкр – скольжение, соответствующее максимальной мощности (критическое скольжение).
Подставляя выражения для Pmaxи sкр в (2.9), получим известную из теории электрических машин формулу Клосса:
 (2.10)
(2.10)К сожалению, эта формула, полученная в первой половине ХХ века, справедлива для двигателей с однослойной обмоткой, которые сейчас практически не выпускаются. Для современных двигателей более экономичной и, следовательно, более сложной конструкции в эту формулу необходимо вводить ряд поправочных коэффициентов.
Реактивная мощность, потребляемая двигателем, определяется выражением
 (2.11)
(2.11)Таким образом, суммарная реактивная мощность, потребляемая двигателем из сети, состоит из двух составляющих: первая Qs отражает зависимость реактивной мощности рассеяния от напряжения и скольжения, вторая Qμ – зависимость реактивной мощности намагничивания от напряжения.
Мощность Qs при уменьшении напряжения увеличивается за счет более заметного увеличения скольжения. При скольжении больше критического (s > sкр » 0,2), что имеет место при напряжении (0,6-0,7)Uном, двигатель интенсивно затормаживается и останавливается (опрокидывается). Мощность Qμ при изменении напряжения изменяется по квадратичной зависимости (см. рис. 2.10).
Рис. 2.10. Характеристикиреактивной мощности асинхронногодвигателя
На основании (2.9) или (2.10) построим характеристику мощности (момента) асинхронного двигателя (рис. 2.11).
Рассмотрим случай, когда момент сопротивления механизма не зависит от скорости вращения двигателя. В этом случае характеристика механизма будет изображаться прямой, параллельной оси абсцисс.
Способность двигателя самостоятельно возвращаться к исходному режиму работы после малых возмущений называют статической устойчивостью двигателя. Определим практические критерии статической устойчивости двигательной нагрузки.
Рассмотрим сначала характеристики системы асинхронный двигатель- механизм. В этой системе вращающий электромагнитный момент создаётся двигателем, а механический момент сопротивления – приводимым в движение механизмом.
Точки пересечения характеристик двигателя и механизма являются точками, где возможен установившийся режим, так как действующие на валу агрегата моменты уравновешены. Однако только в одной из этих точек режим системы будет устойчив.

Рис. 2.11. Режимы работы асинхронного двигателя:
а – устойчивый; б – неустойчивый
Предположим, что при работе системы в точке а двигатель по какой-либо причине притормозился, то есть произошло небольшое увеличение скольжения. Тогда электромагнитная мощность возрастёт, двигатель ускорится, скольжение уменьшится, и система вернется к режиму в точке а.
Иное положение создаётся при работе в точке б. Здесь любое малое возмущение вызовет либо торможение вплоть до остановки, либо переход в режим, соответствующий точке а.
Из всех режимов, лежащих левее и ниже точки а и левее и выше точки б, двигатель будет стремиться перейти в точку устойчивого равновесия а. Из режимов, лежащих правее и ниже точки б, двигатель будет стремиться в сторону увеличения скольжения (уменьшения скорости) вплоть до полной остановки. Отсюда можно сделать вывод, как и в случае синхронного двигателя, что все режимы, соответствующие точкам, лежащим на восходящей части характеристики двигателя, могут быть реализованы, все режимы на нисходящей части неустойчивы.
Условие устойчивой работы можно записать в виде
 .
.При
 имеем граничный режим, при
имеем граничный режим, при  режим работы будет неустойчивым.
режим работы будет неустойчивым.Таким образом, режим работы асинхронного двигателя устойчив, если производная от мощности двигателя по скольжению больше нуля. Этот критерий удобно применять для анализа режимов, связанных с увеличением нагрузки двигателя.
Однако нарушение статической устойчивости может произойти и при снижении напряжения питания.
Характеристики асинхронного двигателя при разных величинах напряжения на его зажимах показаны на рис. 2.12. Приводимый во вращение механизм имеет не зависящую от скорости вращения характеристику.
Рис. 2.12. Характеристики мощности асинхронного двигателя и механизма
При снижении напряжения на зажимах двигателя увеличивается скольжение,двигатель начинает тормозиться, но мощность, развиваемая двигателем, остается неизменной до тех пор, пока максимальная электромагнитная мощность не станет равной мощности механизма (напряжение, соответствующее такому режиму, называют критическим Uкp). Как только это случится, двигатель будет тормозиться до полной остановки (опрокинется), поскольку мощность двигателя окажется меньше мощности механизма.
Условие нарушения устойчивой работы можно в этом случае записать в виде (см. рис. 2.10)

В соответствии с (2.9) зависимость P(U) имеет квадратичный характер, поэтому снижение максимума активной мощности двигателя при снижении напряжения превосходит в относительных единицах снижение напряжения.
Изменения активной и реактивной мощностей асинхронного двигателя при снижении напряжения на его зажимах хорошо видны на рис. 2.13. Активная мощность не изменяетсявплоть до момента опрокидывания (при этом незначительно возрастает скольжение). Реактивная мощность в процессе опрокидывания двигателя резко увеличивается. После остановки двигателя суммарная реактивная мощность при снижении напряжения уменьшается.
Рис. 2.13. Изменения активной и реактивной мощностей асинхронного двигателя при изменении напряжения
Рассмотрим режимы работы двигателя на границе устойчивости. При равенстве максимальной мощности двигателя Pмах и мощности механизма Ро происходит опрокидывание двигателей, т. е. нарушение их устойчивой работы. Этот процесс начинается при равенстве нулю производной
.Как было показано выше,
 .
.При критическом напряжении Рmax=Р. Тогда
 , откуда
, откуда  .
.Что такое асинхронный двигатель и как он работает
Асинхронный двигатель простой и надежный и от этого очень часто используется на производстве и в бытовой технике, от привода задвижек до вращения барабана в стиральной машине. В этой статье мы простыми словами расскажем о том какие бывают асинхронные электродвигатели, что это такое и как работает данный тип электрических машин.
- Виды
- Устройство
- Принцип работы
- Скольжение и скорость вращения
- Сфера применения
Асинхронные двигатели (АД) делятся на две основные группы:
- с короткозамкнутым ротором (КЗ);
- с фазным ротором.
Если опустить нюансы, то отличие заключается в том, что у АД с короткозамкнутым ротором нет щеток и выраженных обмоток, он менее требователен в обслуживании. Тогда как в асинхронных двигателях с фазным ротором есть три обмотки, соединенные с контактными кольцами, ток с которых снимается щетками. В отличие от предыдущего лучше поддаётся регулированию момента на валу и проще реализуется плавный запуск для снижения пусковых токов.
В остальном двигатели классифицируют:
- по количеству питающих фаз — однофазные и двухфазные (используются в быту при питании от сети 220В), и трёхфазные (получили наибольшее распространение на производстве и в мастерских).
- по способу крепления — фланцевое или на лапах.
- по режиму работы — для длительного, кратковременного или повторно-кратковременного режима.
И ряду других факторов, которые влияют выбор конкретного изделия для использования в конкретных условиях.
Об однофазных электродвигателях можно сказать много: некоторые из них запускаются через конденсатор, а некоторым требуется и пусковая и рабочая ёмкость. Есть и варианты с короткозамкнутым витком, которые работают без конденсатора и применяются, например, в вытяжках. Если вам интересно — пишите в комментариях и мы напишем об этом статью.
Устройство
По определению «асинхронным» называют двигатель переменного тока, у которого ротор вращается медленнее чем магнитное поле статора, то есть несинхронно. Но это определение не слишком информативно. Чтобы его понять нужно разобраться как устроен этот двигатель.
Асинхронный двигатель, как и любой другой состоит из двух основных частей — ротор и статор. «Для чайников» в электрике расшифруем:
- Статором называют неподвижную часть любого генератора или электродвигателя.
- Ротором называют вращающуюся часть двигателя, которая и приводит в движение механизмы.

Статор состоит из корпуса, торцы которого закрываются подшипниковыми щитами, в которых установлены подшипники. В зависимости от назначения и мощности двигателя используют подшипники скольжения или качения. В корпусе расположен сердечник, на нём установлена обмотка. Её называют обмоткой статора.

Так как ток переменный, чтобы снизить потери из-за блуждающих токов (токи Фуко) сердечник статора набирают из тонких стальных пластин, изолированных друг от друга окалиной и скрепленных лаком. На обмотки статора подают питающее напряжение, ток протекающий в них называют током статора.
Количество обмоток зависит от числа питающих фаз и конструкции двигателя. Так у трёхфазного двигателя минимум три обмотки, соединённых по схеме звезды или треугольника. Их количество может быть больше, и оно влияет на скорость вращения вала, но об этом мы поговорим далее.
А вот с ротором дела обстоят интереснее, как уже было сказано он может быть или короткозамкнутым, или фазным.

Короткозамкнутый ротор — это набор металлических стержней (обычно алюминиевых или медных), на рисунке выше обозначены цифрой 2, впаянных или залитых в сердечник (1) замкнутых между собой кольцами (3). Такая конструкция напоминает колесо, в котором бегают одомашненные грызуны, отчего её часто называют «беличьей клеткой» или «беличьим колесом» и такое название не жаргонное, а вполне литературное. Для уменьшения высших гармоник ЭДС и пульсации магнитного поля, стержни укладывают не вдоль вала, а под определенным углом относительно оси вращения.
Фазный ротор отличается от предыдущего тем, что на нем уже есть три обмотки, как на статоре. Начала обмоток подключаются к кольцам, обычно медным, они напрессованы на вал двигателя. Позже мы кратко объясним зачем они нужны.

В обоих случаях, один из концов вала соединяют с приводимым в движение механизмом, он выполняется конической или цилиндрической формы с проточками или без, для установки фланца, шкива и других механических приводных деталей.
На «задней» части вала закрепляют крыльчатку, которая необходима для обдува и охлаждения, поверх крыльчатки на корпус надевается кожух. Таким образом холодный воздух направляется вдоль ребер асинхронного двигателя, если эта крыльчатка по какой-то причине не будет вращаться — он перегреется.

Конструкция первого асинхронного двигателя была разработана М.О. Доливо-Добровольским и запатентовал он её в 1889 г. Без особых изменений дожила до настоящего времени.
Принцип работы
Асинхронные электрические машины часто называют индукционными, это связано с их принципом действия. Любой электродвигатель приводится во вращение в результате взаимодействия магнитных полей ротора и статора, а также благодаря силе Ампера. Магнитное поле, в свою очередь, может существовать либо вокруг постоянного магнита, либо вокруг проводника, через который протекает ток. Но как работает именно асинхронная машина?
В асинхронном двигателе в отличие от других нет как таковой обмотки возбуждения, тогда как у него появляется магнитное поле? Ответ прост: асинхронный электродвигатель – это трансформатор.
Рассмотрим принцип его работы на примере трёхфазной машины, так как именно они встречаются чаще остальных.
На рисунке ниже вы видите расположение обмоток на сердечнике статора трёхфазного асинхронного двигателя.
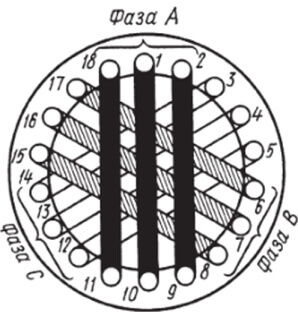
В результате протекания трёхфазного тока в обмотках статора появляется вращающееся магнитное поле. Из-за сдвига фаз ток протекает то по одной, то по другой обмотке, в соответствии с этим возникает магнитное поле, полюса которого направлены согласно правилу правой руки. И в соответствии с изменением тока в той или иной обмотке полюса направляются в соответствующую сторону. Что иллюстрирует следующая анимация:

В простейшем (двух полюсном) случае обмотки уложены таким образом, что каждая из них смещена на 120 градусов относительно предыдущей, как и угол сдвига фаз напряжения в сети переменного тока.
Скорость вращения магнитного поля статора принято называть синхронной. Подробнее о том, как оно вращается, и почему вы узнаете из следующего видеоролика. Отметим, что в двухфазных (конденсаторных) и однофазных электродвигателях — оно не вращающееся, а эллиптическое или пульсирующее, а обмоток не 3, а 2.
Если рассматривать асинхронный электродвигатель с короткозамкнутым ротором, то магнитное поле статора индуцирует в его стержнях ЭДС, так как они замкнуты, то начинает протекать ток. Из-за чего также возникает магнитное поле.
В результате взаимодействия двух полей и силе Ампера, действующей на ротор, он начинает вращаться вслед за вращающимся магнитным полем статора, но при этом всегда немного отставая от скорости вращения МП статора, это отставание называют скольжением.
Если скорость вращения магнитного поля называют синхронной, то скорость вращения ротора уже асинхронной, от чего он и получил такое название.
У АД с фазным ротором дела обстоят подобным образом, за исключением того, что к его кольцам подключают реостат, который после того как двигатель выйдет на рабочий режим выводится из цепи и обмотки замыкаются накоротко. Это показано на схеме ниже, но вместо реостата использованы постоянные резисторы, подключаемые или шунтируемые контакторами КМ3, КМ2, КМ1.
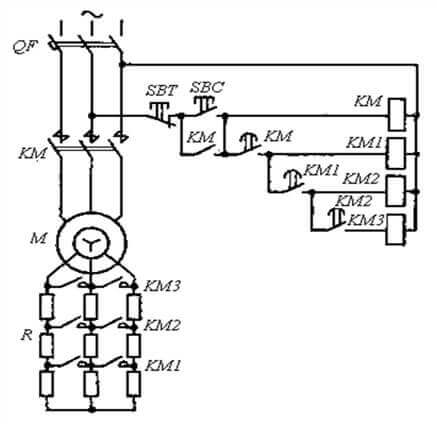
Такой подход позволяет осуществлять плавный запуск и снижать пусковые токи, за счет увеличения активного электрического сопротивления ротора.
 Подведем итоги:
Подведем итоги:- Ток в обмотках статора порождает магнитное поле.
- Магнитное поле приводит к возникновению тока в роторе.
- Ток в роторе к возникновению поля вокруг него.
- Так как поле статора вращается, то из-за своего поля ротор начинает вращаться за ним.
Скольжение и скорость вращения
Частота вращения магнитного поля статора (n1) больше, чем частота вращения ротора (n2). Разница между ними называется скольжением, а обозначается латинской буквой S и вычисляется по формуле:
Скольжение не является недостатком этого электродвигателя, поскольку если бы его вал вращался с той же частотой, что и магнитное поля статора (синхронно), то в его стержнях не индуцировался бы ток, и он бы просто не стал вращаться.
Теперь о более важном понятии — частота вращения ротора асинхронного электродвигателя. Она зависит от 3 величин:
- частота напряжения питающей сети (f);
- число пар магнитных полюсов (p);
- скольжение (S).
Число пар магнитных полюсов определяет синхронную скорость вращения поля и зависит от числа обмоток статора. Скольжение зависит от нагрузки и конструкции конкретного электродвигателя и лежит в пределах 3-10%, то есть асинхронная скорость совсем немного меньше синхронной. Ну а частота переменного тока у нас фиксирована и равняется 50 Гц.
Поэтому частоту вращения вала асинхронного двигателя сложно регулировать, вы можете воздействовать лишь на частоту питающей сети, то есть установив частотный преобразователь. Можно и понижать напряжение статора, но тогда уменьшается мощность на валу, тем не менее такой приём применяют при пуске АД с переключением обмоток со звезды на треугольник для уменьшения пусковых токов.
Частота вращения поля статора (синхронная скорость) определяется по формуле:
Так в двигателе с одной парой магнитных полюсов (два полюса) синхронная скорость равна:
Наиболее распространены следующие варианты электродвигателей с:
- одной парой полюсов (3000 об/мин);
- двумя (1500 об/мин);
- тремя (1000 об/мин);
- четырьмя (750 об/мин).
Реальная скорость вращения ротора будет несколько ниже, на реальном асинхронном двигателе она указывается на шильдике, например, здесь – 2730 об/мин. Несмотря на это, в народе такой асинхронный двигатель будут называть согласно синхронной скорости или просто «трёхтысячник».

Тогда его скольжение равняется:
Сфера применения
Асинхронный электродвигатель нашел применение во всех сферах деятельности человека. Те что питаются от одной фазы (от 220В) можно встретить в исполнительных механизмах малой мощности или в бытовой технике и инструменте, например:
- в стиральной машине типа «малютка» и других старых советских моделей;
- в бетономешалке;
- в вентиляторе;
- в вытяжке;
- и даже в газонокосилках верхнего ценового сегмента.



На производстве в трёхфазных сетях:
- автоматические задвижки;
- грузоподъёмные механизмы (краны и лебедки);
- вентиляция;
- компрессоры;
- насосы;
- дерево- и металообрабатывающие станки и другое.




Также АД используется в электротранспорте, а в последнее время в интернете активно рекламируют асинхронный двигатель с обмоткой типа «Славянка» и, так называемое, мотор-колесо Дуюнова, о чем вы можете узнать из видеоролика разработчика.
Область применения асинхронных двигателей настолько обширна, что один только список будет длиннее чем эта статья, поэтому каждый электрик должен знать, как он устроен, для чего нужен и где применяется. Подведем итоги и перечислим плюсы и минусы этих устройств.
- Простая конструкция.
- Низкая стоимость.
- Почти не требуют обслуживания.
Главный недостаток — сложность регулировки оборотов, по сравнению с теми же двигателями постоянного тока или универсальными коллекторными машинами. Соответственно и сложно организовать плавный пуск больших машин, и чаще это делают с помощью дорогого частотного преобразователя.
На этом мы и заканчиваем рассмотрение асинхронных электродвигателей и их области применения. Надеемся, после прочтения статья вам стало понятно, что это такое и как работает данная электрическая машина!
РАСЧЁТ ПАРАМЕТРОВ ПУСКА АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ
Занятие 38. Пусковые характеристики асинхронного двигателя
График зависимости М = f (s)
называется пусковой характеристикой двигателя.
Изменяя значение скольжения от s = 0 до s = 1 и, находя по приведенной формуле значение момента можно пусковую характеристику.
Для устойчивой работы двигателя важно, чтобы автоматически устанавливалось равновесие вращающего и тормозящего моментов: с увеличением нагрузки на валу двигателя должен соответственно возрастать и вращающий момент.
Это уравновешивание у работающего асинхронного двигателя осуществляется следующим образом:
при увеличении нагрузки на валу тормозящий момент оказывается больше вращающего, вследствие чего скорость вращения ротора уменьшается – скольжение возрастает.
Повышение скольжения вызывает увеличение вращающего момента, и равновесие моментов восстанавливается при возросшем скольжении.
Однако зависимость вращающего момента от скольжения сложна. В частности, повышение скольжения вызывает увеличение вращающего момента только при изменении скольжения в определенных пределах. За этими пределами нарушенное равновесие моментов не восстанавливается – двигатель останавливается.
На пусковой характеристике имеются три характерных точки, определяющих условия работы двигателя. (А,Б,В)
В точке А двигатель работает устойчиво. Если двигатель под влиянием какой-либо причины уменьшит частоту вращения, то скольжение его возрастет, вместе с ним возрастет вращающий момент. Благодаря этому частота вращения двигателя повысится, и вновь восстановится равновесие электромагнитного и противодействующего моментов Мэм = М2;. В точке Б работа двигателя не может быть устойчива: случайное отклонение частоты вращения приведет либо к остановке двигателя, либо к переходу его в точку А. Следовательно, вся восходящая ветвь характеристики является областью устойчивой работы двигателя, а вся нисходящая часть — областью неустойчивой работы.
Точка Б, соответствующая максимальному моменту, разделяет области устойчивой и неустойчивой работы. Максимальному значению вращающего момента соответствует критическое скольжение Sk. Скольжению S = 1 соответствует пусковой момент. Если величина противодействующего тормозного момента М2больше пускового МП, двигатель при включении не запустится, останется неподвижным.

Рис.38.1. Пусковая характеристика асинхронного двигателя.
Для целей электропривода большое значение имеет зависимость скорости
вращения двигателя от нагрузки на валу n=F(M);
эта зависимость носит назва-
ние механической характеристики(рис.38.2).
По форме своей она отличается от кривой M=F(s)
только положением по отношению к координатным осям.
Рис. 38.2. Механическая характеристика асинхронного двигателя
Пусковые свойства двигателя
Пусковые свойства асинхронного двигателя оцениваются его пусковыми характеристиками:
а) величиной пускового тока Iп или его кратностью Iп/ I1н;
б) величиной пускового момента Мп или его кратностью Мп/Мн;
в) продолжительностью и плавностью пуска двигателя в ход;
г) сложностью пусковой операции;
д) экономичностью пусковой операции (стоимость и надежность пусковой аппаратуры).
В начальный момент пуска скольжение s = 1, поэтому, пренебрегая током холостого хода, величина пускового тока Iп будет равна
Iп = U1 / (√ [(r1 + r’2)2 + (x1 + x’2)2]).
Следовательно, улучшить пусковые свойства двигателя можно путем увеличения активного сопротивления цепи ротора r’2, так как в этом случае уменьшается пусковой ток и увеличивается пусковой момент. В то же время напряжение U1 по-разному влияет на пусковые характеристики: с уменьшением U1 пусковой ток уменьшается, что благоприятно влияет на пусковые свойства двигателя, но одновременно это вызывает уменьшение пускового момента. Возможность применения того или иного способа улучшения пусковых характеристик определяется условиями эксплуатации двигателя и требованиями, которые к нему предъявляются.
Практически используются следующие способы пуска: непосредственное подключение обмотки статора к сети (прямой пуск); понижение напряжения, подводимого к двигателю при пуске; подключение к обмотке ротора пускового реостата.
Прямой пуск применяется для двигателей малой и средней мощности. Обычно при прямом пуске действующее значение пускового тока превосходит номинальное значение в четыре — шесть раз.
Прямой пуск самый распространенный способ пуска в ход асинхронных двигателей. Недостатками его являются: большой пусковой ток и сравнительно малый пусковой момент, достоинство — простота.
Пуск асинхронного двигателя при пониженном напряжении применяют для двигателей большой мощности. Понижение напряжения может осуществляться тремя способами:
а) путем переключения обмотки статора при пуске с нормальной схемы «треугольник» на пусковую схему «звезда». В этом случае фазовое напряжение уменьшается в
раз, что обуславливает уменьшение фазовых токов в раз и линейных токов в 3 раза. По окончании процесса пуска обмотку статора переключают на нормальную схему «треугольник».
Конструкция
В каждом электромоторе есть две важных рабочих детали: ротор и статор. Они заключены в защитный кожух. Для охлаждения проводников обмотки на валу ротора установлен вентилятор. Это общий принцип строения всех типов электродвигателей.
Конструкции статоров рассматриваемых электродвигателей ничем не отличаются от строения этих деталей в других типах электромоторов, работающих в сетях переменного тока. Сердечники статора, предназначенного для работы при трехфазном напряжении, располагаются по кругу под углом 120º. На них устанавливаются обмотки из изолированной медной проволоки определённого сечения, которые соединяются треугольником или звездой. Конструкция магнитопровода статора жёстко крепится на стенках цилиндрического корпуса.
Строение электродвигателя понятно из рисунка 1. Обратите внимание на конструкцию обмоток без сердечника в короткозамкнутом роторе.

Рис. 1. Строение асинхронного двигателя с КЗ Ротором
Немного по-другому устроен ротор. Конструкция его обмотки очень похожа на беличью клетку. Она состоит из алюминиевых стержней, концы которых замыкают короткозамыкающие кольца. В двигателях большой мощности в качестве короткозамкнутых обмоток ротора можно увидеть применение медных стержней. У этого металла низкое удельное сопротивление, но он дороже алюминия. К тому же медь быстрее плавится, а это не желательно, так как вихревые токи могут сильно нагревать сердечник.
Конструктивно стержни расположены поверх сердечников ротора, которые состоят из трансформаторной стали. При изготовлении роторов сердечники монтируют на валу, а проводники обмотки впрессовывают (заливают) в пазы магнитопровода. При этом нет необходимости в изоляции пазов сердечника. На рисунке 2 показано фото ротора с КЗ обмотками.

Рис. 2. Ротор асинхронного двигателя с КЗ обмотками
Пластины магнитопроводов таких роторов не требуют лаковой изоляции поверхностей. Они очень просты в изготовлении, что удешевляет себестоимость асинхронных электродвигателей, доля которых составляет до 90% от общего числа электромоторов.
Ротор асинхронно вращается внутри статора. Между этими деталями устанавливаются минимальные расстояния в виде воздушных зазоров. Оптимальный зазор находится в пределах от 0,5 мм до 2 мм.
В зависимости от количества используемых фаз асинхронные электродвигатели можно разделить на три типа:
- однофазные;
- двухфазные;
- трёхфазные.
Они отличаются количеством и расположением обмоток статора. Модели с трехфазными обмотками отличаются высокой стабильностью работы при номинальной нагрузке. У них лучшие пусковые характеристики. Зачастую такие электродвигатели используют простую схему пуска.
Двухфазные двигатели имеют две перпендикулярно расположенных обмотки статора, на каждую из которых поступает переменный ток. Их часто используют в однофазных сетях – одну обмотку подключают напрямую к фазе, а для питания второй применяют фазосдвигающий конденсатор. Без этой детали вращение вала асинхронного электродвигателя самостоятельно не начнётся. В связи с тем, что конденсатор является неотъемлемой частью двухфазного электромотора, такие двигатели ещё называют конденсаторными.
Пусковое свойство — асинхронный двигатель
Пусковые свойства асинхронных двигателей характеризуются начальным пусковым и максимальным моментами и начальным пусковым током. В двигателях с фазными роторами начальный момент и пусковой ток определяются сопротивлением пускового реостата. [1]
Пусковые свойства асинхронных двигателей с контактными кольцами зависят от сопротивления пускового реостата, включаемого в цепь обмотки ротора, поэтому кратности Ми / Мп и / ш / Лн в каталогах не приводятся. [3]
Пусковые свойства асинхронного двигателя определяются особенностями его конструкции, в частности устройством ротора. [4]
Пусковые свойства асинхронного двигателя определяются зависимостями вращающего момента и тока от частоты вращения. Эти характеристики определяют и другие показатели: длительность пуска, потери энергии в обмотках и, следовательно, их нагрев. Для уменьшения длительности пуска, потерь энергии в обмотках двигателя и их нагрева стремятся к увеличению пускового момента и снижению пускового тока. [5]
Начальный пусковой момент Мпуск характеризует пусковые свойства асинхронного двигателя . [6]
Коэффициент качества пуска у может характеризовать пусковые свойства асинхронных двигателей . Однако большое значение коэффициента у может оказаться у двигателя с недостаточно высокими энергетическими показателями. [7]
Как было отмечено ранее, коэффициент качества пуска у [ см. формулу (3.48) ] может характеризовать пусковые свойства асинхронных двигателей . Однако большое значение коэффициента у может оказаться у двигателя с недостаточно высокими энергетическими показателями. [8]
Какие показатели определяют пусковые свойства асинхронных двигателей

Пусковые свойства двигателя определяются в первую очередь значением пускового тока Iп или его кратностью Iп/ Iном и значением пускового момента Мп или его кратностью Мп/Мном. Двигатель, обладающий хорошими пусковыми свойствами, развивает значительный пусковой момент при сравнительно небольшом пусковом токе. Однако получение такого сочетания пусковых параметров в асинхронном двигателе сопряжено с определенными трудностями. В начальный момент пуска скольжение s = 1, поэтому, пренебрегая током х.х., пусковой ток можно определить подставив s = 1:
Iп
=U1/.
Пусковой момент поMп
=
Улучшить пусковые свойства двигателя можно увеличением активного сопротивления цепи ротора r2′, так как в этом случае уменьшение пускового тока сопровождается увеличением пускового момента. В то же время напряжение U1 по-разному влияет на пусковые параметры двигателя: с уменьшением U1 пусковой ток уменьшается, что благоприятно влияет на пусковые свойства двигателя, но одновременно уменьшается пусковой момент. Целесообразность применения того или иного способа улучшения пусковых свойств двигателя определяется конкретными условиями эксплуатации двигателя и требованиями, которые предъявляются к его пусковым свойствам. Помимо пусковых значений тока Iп и момента Мп пусковые свойства двигателей оцениваются еще и такими показателями: продолжительность и плавность пуска, сложность пусковой операции, ее экономичность (стоимость и надежность пусковой аппаратуры и потерь энергии в ней).Подключение
Статорные обмотки трёхфазного АДКР можно подключать по схеме «треугольник» либо «звезда». При этом для звёздочки требуется напряжение выше, чем для треугольника.
Обратите внимание на то, что электродвигатель, подключенный разными способами к одной и той же сети, потребляет разную мощность. Поэтому нельзя подключать электромотор, рассчитанный на схему «звезда» по принципу треугольника. Но с целью уменьшения пусковых токов можно коммутировать на время пуска контакты звезды в треугольник, но тогда уменьшится и пусковой момент.
Схемы включения понятны из рисунка 4.

Рис. 4. Схемы подключения
Для подключения трёхфазного электрического двигателя к однофазному току применяют фазосдвигающие элементы: конденсаторы, резисторы. Примеры таких подключений смотрите на рисунке 5. Можно использовать как звезду, так и треугольник.
Рис. 5. Примеры схем подключений в однофазную сеть
С целью управления работой двигателя в электрическую цепь статора подключаются дополнительные устройства.