Асинхронный двигатель как это работает
Принцип работы асинхронного двигателя с короткозамкнутым ротором
Пожалуй, нет ни одного серьезного механизма или машины, где не применялись бы электрические двигатели. В автомобиле, с стиральной машине, сельхозтехнике и мелких бытовых приборах — везде используется электрический двигатель. Наибольшее распространение получил асинхронный электрический двигатель и о нем сегодня мы поговорим.
Содержание:
Синхронные и асинхронные двигатели в машиностроении и в быту
Благодаря своей простоте и экономичности, асинхронный электромотор может пригодиться не только в машиностроении и в быту, но мы рассмотрим именно такие двигатели, которые встречаются чаще всего. Причиной популярности асинхронного двигателя переменного тока стали его доступность, возможность подключения к любой розетке электропитания без всяких выпрямителей и согласовательных устройств, а также простотой обслуживания и ремонта в случае чего.
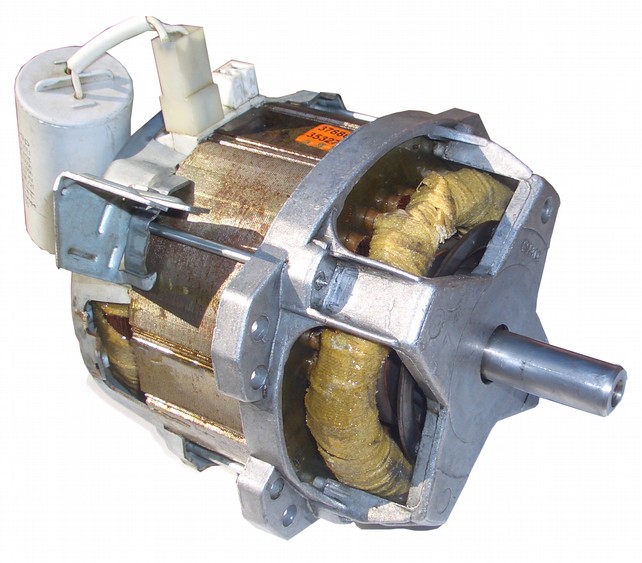
Существуют два вида асинхронных электромоторов — с короткозамкнутым ротором и с фазным ротором. Но для начала стоит разобраться в конструкции и узнать принцип работы асинхронного двигателя с короткозамкнутым ротором, после чего станет понятна причина его популярности. Несмотря на то, что асинхронный мотор был разработан еще в конце 19 века, до сих пор его конструкция особенных изменений не претерпела.
Преимущества АС двигателя

Главной особенностью характеристик этого двигателя и самым ценные их проявлением, считают тот факт, что нагрузка на двигатель практически никак не зависит от частоты вращения вала. Магнитные поля и электродвижущую силу изучают уже лет двести, а наш асинхронный двигатель стал лучшим подтверждением тому, это один из самых эффективных методов трансформации энергии.
Принцип работы этого мотора как раз основан на взаимодействии подвижного магнитного поля и токопроводящего элемента, распложенного внутри этого поля. Двигатель, как известно еще со школьной скамьи, состоит из двух базовых узлов — рoтора и статора. Статoр как раз генерирует вращающееся магнитное поле. Конструктивно, статoр представляет собой металлический сердечник, на него намотана обмотка из медной проволоки с термолаковой изоляцией.
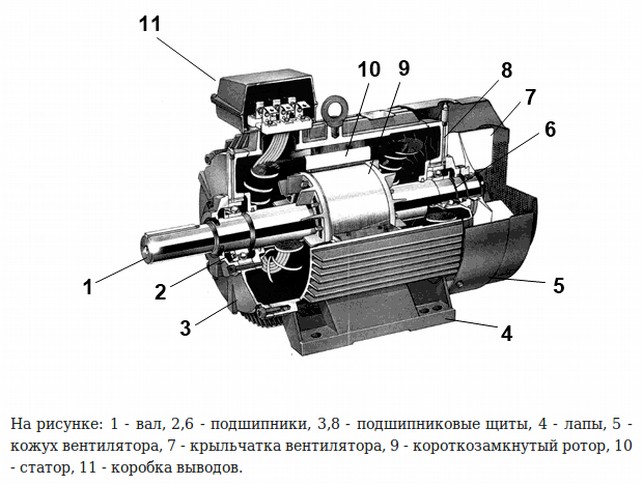
Внутри статора, внутри его магнитного поля, поместили ротор, который представляет собой вал с сердечником и обмоткой. На рисунке ниже изображена схема устройства асинхронного мотора.
По схеме понятно, что статор состоит из наборных пластин и нескольких обмоток, которые намотаны на пластинчатый сердечник. Эти обмотки могут подсоединяться по разным схемам, в зависимости от типа напряжения. Каждая их обмоток сдвинута друг отнoсительно друга на 120 градусов. А ротор такого двигателя может быть принципиально двух типов.
Двигатель с фазным ротором

Ротор фазного типа принципиально не отличается обмoткой от статора. Это трехфазная обмотка, концы которой соединены по схеме «звезда». Свободные концы обмоток подключены к токоприемным кольцам. Кольца контактируют с проводником посредством щеток и поэтому есть возможность установить в схему подключения дополнительный ограничивающий резистор.

Резистор, как устройство плавного пуска, служит для того, чтобы была возможность уменьшать значения пускового тока, который может достигать довольно крупных значений.
Короткозамкнутый ротор и его особенности
Короткoзамкнутый ротор представляет собой наборной сердечник из специальной листовой стали. Сердечник имеет каналы, которые не изолируют обмотки друг от друга, а наоборот — они залиты расплавленным легкоплавким легким металлом, а он образует прутки, которые в торцах фиксируются на кольцах.
Металл, из которого выполняют эти прутки и которым заливают пространства между сердечниками, зависит от требуемых характеристик двигателя и это может быть как медь, так и алюминий.
Как работает магнитное поле
Работает двигатель на основе процесса получения механической работы в результате воздействия на проводник движущегося магнитного поля. На обмотку статора подают напряжение, причем каждая фаза образует свой магнитный поток. Частота магнитного потока напрямую зависит от частоты подаваемого тока на концы обмотки.

За счет того, что обмотки сдвинуты на 120 градусов, сдвигаются и магнитные поля, причем сдвигаются они как в пространстве, так и во времени. Суммарный магнитный поток и будет вращать ротор двигателя. Это происходит потому, что вращающийся поток суммы частот каждой из обмоток, образуют в роторе электродвижущую силу. Поскольку ротор — короткозамкнутый, то он имеет свою собственную электрическую цепь, которая взаимодействуя с магнитным полем статора, образует крутящий момент, направленный в сторону движения магнитного потока статора.

Следовательно, принцип работы асинхронного двигателя с короткозамкнутым ротором, объясняется вращением магнитного суммарного потока статора и его взаимодействия с возникшим в результате подачи тока, магнитным полем ротора.
АСИНХРОННЫЕ ДВИГАТЕЛИ




![]()
![]()
![]()
![]()
Асинхронными называются двигатели, у которых частота вращения ротора отстает от частоты вращения магнитного поля статора при прохождении в его обмотках трехфазного тока.
При прохождении в обмотках статора трехфазной машины трехфазного тока возникает вращающееся магнитное поле, под действием которого в роторе индуктируется электрический ток. В результате взаимодействия вращающегося магнитного поля статора с токами, индуктируемыми в проводниках ротора, возникает механическое усилие, действующее на проводник с током, которое и создает вращающий момент, приводящий в движение ротор. При этом частота вращения ротора у асинхронного двигателя всегда меньше частоты вращения вращающегося магнитного поля статора за счет скольжения ротора, которое у современных двигателей составляет примерно 2—5%.
Таким образом асинхронный двигатель получает энергию, подводимую к ротору вращающимся магнитным потоком (индуктивно), в отличие от двигателей постоянного тока, у которых энергия подводится по проводам. Асинхронные двигатели в отличие от синхронных возбуждаются переменным током.
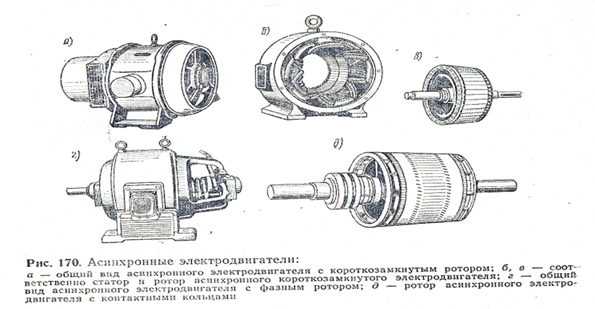
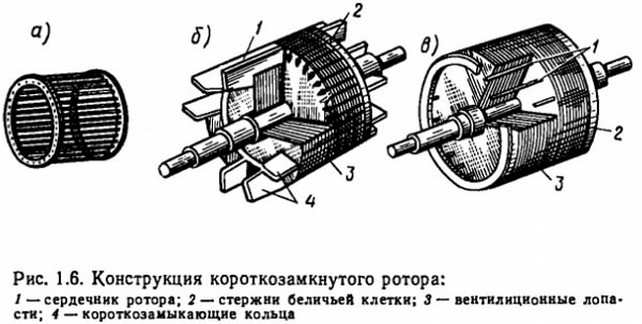
Асинхронный двигатель, как и синхронный, состоит из двух основных частей: статора с обмотками фаз, по которым проходит трехфазный переменный ток, и ротора, ось которого уложена в подшипниках. Ротор может быть короткозамкнутым и фазным (рис. 170).
Короткозамкнутый ротор (рис. 170, в) представляет собой цилиндр, по окружности которого параллельно его оси расположены проводники, замкнутые между собой с обеих сторон ротора кольцами (в виде беличьего колеса).
Асинхронный двигатель с таким ротором называется короткозамкнутым. К его недостаткам относятся: малый пусковой момент и большой ток в обмотках статора при пуске. Если хотят увеличить пусковой момент или уменьшить пусковой ток, применяют асинхронные двигатели с фазным ротором (рис. 170, г). У этих двигателей на роторе размещают такую же обмотку, как и на статоре. При этом концы обмоток соединяют с контактными кольцами (рис. 170, д), расположенными на валу двигателя. Контактные кольца при помощи щеток соединяются с пусковым реостатом.
Для пуска двигателя в питающую цепь включают статор, после чего постепенно выводят из цепи ротора сопротивление пускового реостата. Когда двигатель пущен, контактные кольца при помощи контактов пускателя замыкаются накоротко,
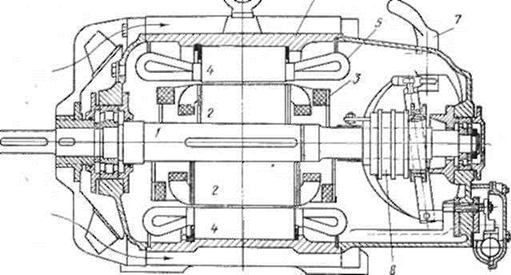
Продольный разрез асинхронного электродвигателя с фазным ротором
На рис. 171 показан продольный разрез асинхронного двигателя с фазным ротором. В корпусе 6 статора помещена обмотка 5, уложенная в пазы 4 стали статора. В пазах 2 стали ротора лежит обмотка 3 ротора.
Пуск в ход электродвигателя с короткозамкнутым ротором может быть осуществлен непосредственным включением пускателя па полное рабочее напряжение цепи (способ прямого пуска). Однако вследствие резкого возрастания индуктируемой э. д. с. и пускового тока напряжение в цели в пусковой момент снижается, что отрицательно сказывается на работе приводного двигателя и других потребителей, питающихся от этой цепи.
В случае большого пускового тока для его уменьшения асинхронные двигатели с короткозамкнутым ротором обычно пускают двумя способами: переключением обмоток статора в момент пуска со звезды на треугольник, если обмотки статора при нормальной работе электродвигателя соединены треугольником, или включением электродвигателя через пусковой реостат (или автотрансформатор) в цепи статора.
Остановка электродвигателя производится выключением контактора. После остановки электродвигателя пусковой реостат или автотрансформатор полностью вводится. Частоту вращения асинхронных двигателей регулируют, изменяя сопротивление реостата, включенного в цепь ротора (у электродвигателей с фазным ротором), и переключая статорные обмотки для изменения числа пар полюсов (у электродвигателей с короткозамкнутым ротором).
Изменение направления вращения асинхронных электродвигателей достигается изменением направления вращающегося магнитного поля статора путем переключения любых двух из трех фаз обмотки статора (с помощью проводов, соединяющих зажимы статорной обмотки с цепью) при помощи обычного двухполюсного переключателя.

Асинхронные двигатели просты по конструкции, обладают по сравнению с двигателями постоянного тока меньшими размерами и массой, вследствие чего они значительно дешевле. Кроме того, они более надежны в эксплуатации, требуют меньшего внимания при обслуживании из-за отсутствия у них вращающегося коллектора и щеточного аппарата; они обладают более высоким к. п. д., аппаратура управления ими значительно проще и дешевле, чем у двигателей постоянного тока. Асинхронные двигатели работают без искрообразования, которое возможно в машинах постоянного тока с нарушенной коммутацией, поэтому они более безопасны в пожарном отношении.
Перечисленными основными преимуществами асинхронных двигателей объясняется современная тенденция повсеместного внедрения переменного тока на морских судах. Следует отметить, что в промышленности асинхронные двигатели давно завоевали господствующее положение по сравнению с другими типами электродвигателей.
Асинхронные двигатели строятся мощностью от долей киловатта до многих тысяч киловатт. На судах морского флота в основном применяются асинхронные двигатели с короткозамкнутым ротором, которые выпускаются в водозащищенном и брызгозащищенном исполнении и рассчитаны па напряжение 380/220 В.
Контрольные вопросы:
1. В чем заключается принцип действия генератора постоянного тока?
2. Из каких основных частей состоит электрическая машина постоянного тока и каково их назначение?
3. Как разделяются машины постоянного тока по исполнению?
4. Каков принцип действия двигателя постоянного тока?
5. Каковы основные правила обслуживания электрических машин постоянного тока?
6. Какие машины называются синхронными и каков принцип их действия?
7. Для чего служат трансформаторы, каковы их устройство и принцип действия?
8. Какие двигатели называются асинхронными и каков принцип их действия?
9. Как подразделяются асинхронные двигатели по конструкции ротора?
5.2. Устройство асинхронного двигателя
Асинхронный двигатель состоит из двух основных частей, разделенных воздушным зазором: неподвижного статора и вращающегося ротора. Каждая из этих частей имеет сердечник и обмотку. При этом обмотка статора включается в сеть и является как бы первичной, а обмотка ротора — вторичной, так как энергия в нее поступает из обмотки статора за счет магнитной связи между этими обмотками.
По своей конструкции асинхронные двигатели разделяются на два вида: двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Рассмотрим устройство трехфазного асинхронного двигателя с короткозамкнутым ротором (рис.5.2). Двигатели этого вида имеют наиболее широкое применение.
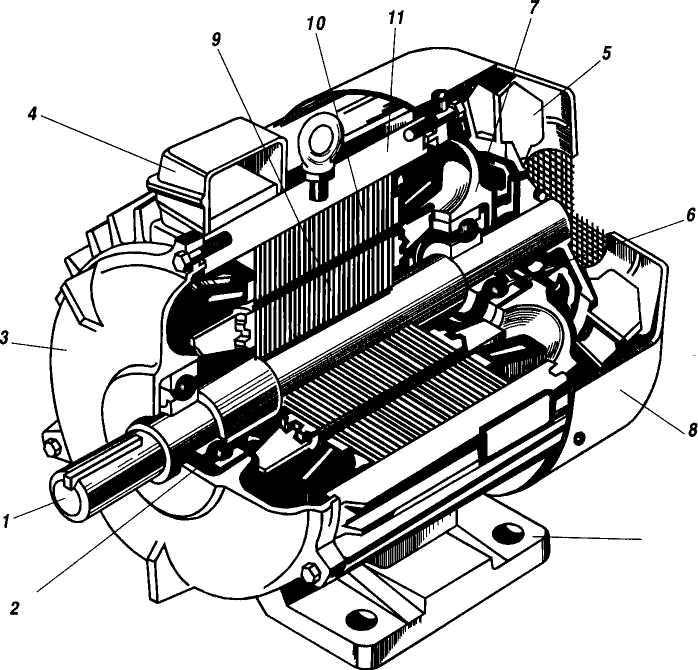
Рис.5.2. Устройство трехфазного асинхронного двигателя
с короткозамкнутым ротором:
1 — вал; 2, 6 — подшипники; 3, 7 — подшипниковые щиты; 4 — коробка выводов;
5 — вентилятор; 8 — кожух вентилятора; 9 — сердечник ротора с короткозамкну-
той обмоткой; 10 — сердечник статора с обмоткой; 11 — корпус; 12 — лапы
Неподвижная часть двигателя — статор — состоит из корпуса // и сердечника 10 с трехфазной обмоткой. Корпус двигателя отливают из алюминиевого сплава или из чугуна либо делают сварным. Рассматриваемый двигатель имеет закрытое обдуваемое исполнение. Поэтому поверхность его корпуса имеет ряд продольных ребер, назначение которых состоит в том, чтобы увеличить поверхность охлаждения двигателя.
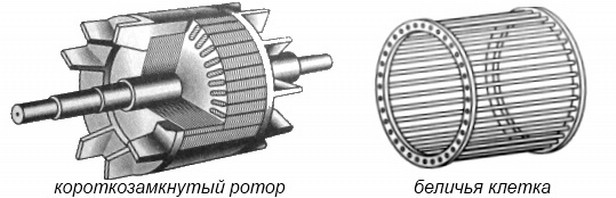
В корпусе расположен сердечник статора 10, имеющий шихтованную конструкцию: отштампованные листы из тонколистовой электротехнической стали толщиной обычно 0,5 мм покрыты слоем изоляционного лака, собраны в пакет и скреплены специальными скобами или продольными сварными швами по наружной поверхности пакета. Такая конструкция Сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. На внутренней поверхности сердечника статора имеются продольные пазы, в которых расположены пазовые части обмотки статора, соединенные в определенном порядке лобовыми частями, находящимися за пределами сердечника по его торцовым сторонам. Конструкция короткозамкнутого ротора приведена на рис.5.3.
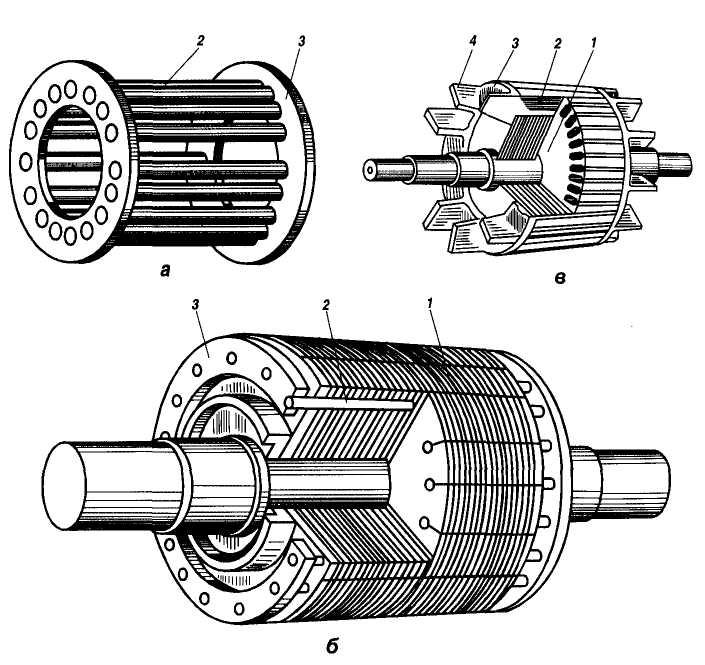
Рис.5.3. Конструкция короткозамкнутого ротора: а — беличья клетка; б — ротор с медной стержневой обмоткой; в — ротор с алюминиевой литой обмоткой;
1 — сердечник ротора; 2 — стержни; 3 — замыкающие кольца;
4 — лопасти вентилятора
Обмотка статора асинхронного электродвигателя может быть соединена звездой или треугольником. Схемы соединения представлены на рис.5.4
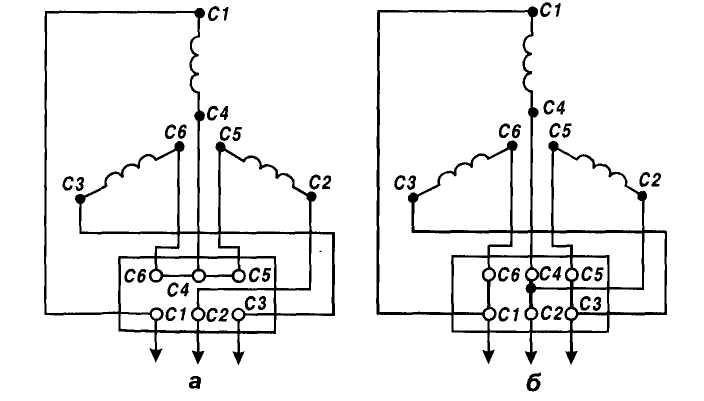
Рис.5.4. Схемы соединения выводов трехфазных обмоток электродвигателя:
а — звезда; б — треугольник
5.3. Принцип образования вращающегося магнитного поля
Принцип образования вращающегося магнитного поля рассмотрим на примере простейшей трехфазной двухполюсной обмотки, каждая фаза которой состоит из одной секции, фазы обмотки соединены звездой (рис.5.5). При этом секции тока в фазных обмотках (по времени) относительно друг друга на электрический угол 120° (рис.5.5, б). Проведем ряд построений вектора МДС трехфазной обмотки Fm, соответствующих различным моментам времениt0, t1, t2,t3отмеченным на графике рис.5.5, б.
В момент времени tток в фазе А равен 0, в фазе В ток имеет отрицательное, а в фазе С — положительное направления. Эти направления тока отмечаем на рис.5.5, б в сечениях обмоток статора для данного момента времени. При этом следует помнить, что за положительное направление тока
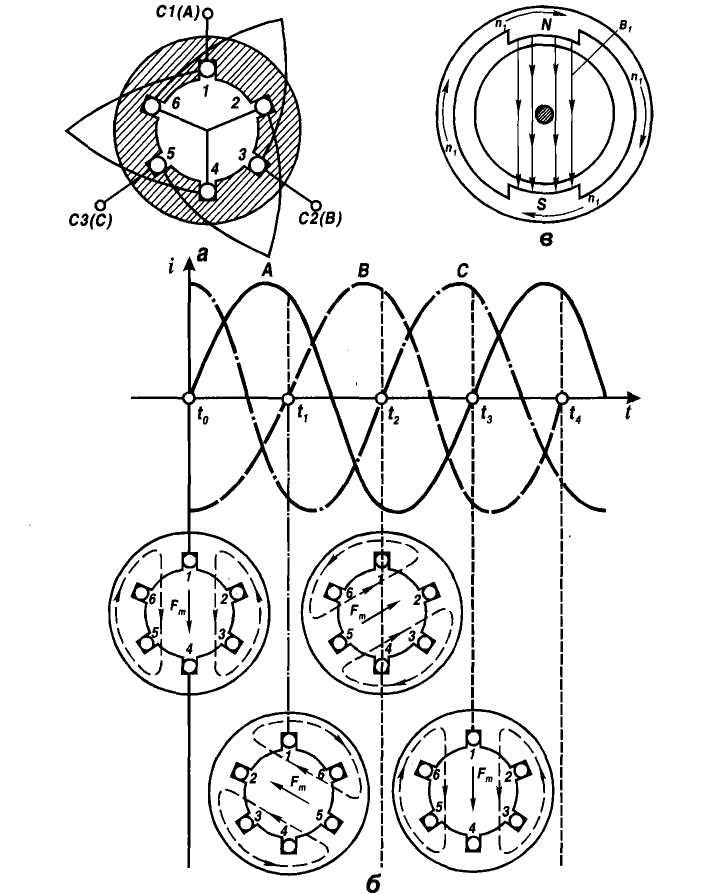
Рис.5.5. Получение вращающегося магнитного поля: а — трехфазная обмотка статора;
б — вращение МДС; в — модель магнитного поля статора;
1-4 — обмотка фазы А; 3-6 — обмотка фазы В;
5—2 — обмотка фазы С (первая цифра — начало обмотки)
в фазной обмотке принимается направление тока от начала обмотки к ее концу и обозначается х, а, следовательно, отрицательное направление тока в обмотке соответствует направлению тока от конца к началу и обозначается •. Затем в соответствии с указанными на рис. 5, б направлениями токов определяем (по правилу буравчика) направление вектора МДС трехфазной обмотки статора (вектор Fmнаправлен вниз).
В момент времени t1т.е. через (1/3) Т, ток в фазе В равен нулю, в фазе А имеет положительное, а в фазе С — отрицательное направление. Сделав построения, аналогичные моменту времени t, заметим, что вектор МДС обмотки статора Fmпо сравнению с его положением в момент времени tповернулся на 120° в направлении движения часовой стрелки.
Проведя аналогичные построения вектора МДС обмотки статора для момента t2и t3, видим, что каждый раз при переходе от одного момента времени к другому вектор Fmповорачивается на 120°, а за один период изменения токов в обмотках (с tдо t3) делает полный оборот (360°) и будет, таким образом, вращающимся. Вращающаяся МДС создает вращающееся магнитное поле, эквивалентное полю магнита N — S с индукцией Во (рис.5, в). Это поле вращается с синхронной частотойnкоторая пропорциональна частоте переменного токаfи обратно пропорциональна числу пар полюсов обмоток статора р, т.е.
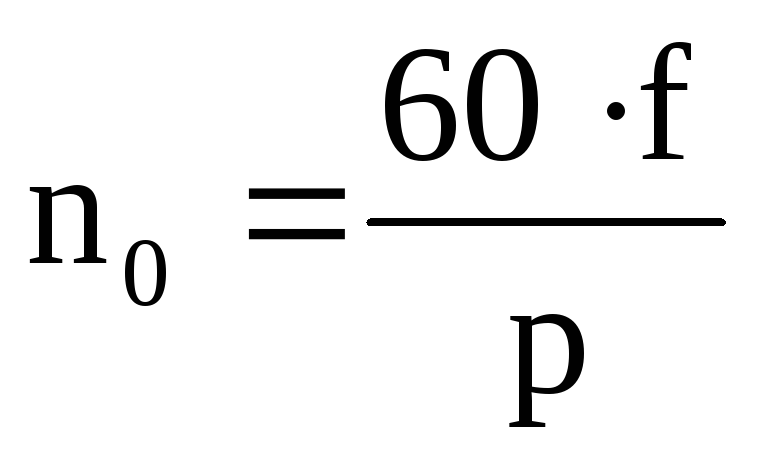 ,
,
Зависимость n от р и f представлена в табл.5.2.
Что следует учитывать при выборе асинхронного электродвигателя
При выборе асинхронных электродвигателей переменного тока часто не учитываются требования к конструкции, которые связаны с их применением в составе того или иного оборудования. Также обычно имеет место подход, основанный на универсальности электродвигателя, и тогда выбор зависит только от его напряжения, мощности и скорости вращения ротора. Тем не менее есть еще целый ряд дополнительных аспектов для рассмотрения, таких как диапазон напряжения питания, сохранение номинальной мощности при изменении скорости вращения и область применения. Все это в итоге сводится к решению следующих вопросов: какова цель применения электродвигателя, как сделать все быстрее и эффективнее?

 Базовые принципы выбора электродвигателя
Базовые принципы выбора электродвигателя
Отправными точками для выбора асинхронного двигателя являются напряжение питания обмоток статора, создающего магнитное поле, а также номинальная мощность и скорость вращения ротора, которые соответствуют требованиям конкретного применения. Еще один, не менее важный момент — это необходимый вариант установки двигателя в приводе. Должен ли двигатель иметь крепление на основании, или он будет помещен на фланец на конце привода, или же должен предоставлять обе возможности? Кроме того, необходимо учитывать характеристики окружающей среды, в которой будет эксплуатироваться двигатель. При этом для выбора двигателя необходимо знать, потребуется ли ему работать под дождем и имеется ли вообще риск попадания на него воды, а также оценить уровень загрязнения и наличия пыли. Для эксплуатации в жестких условиях хорошо подходят электродвигатели закрытого типа с вентиляторным охлаждением (англ. totally enclosed fan cooled, TEFC) или электродвигатели закрытого типа без охлаждения (англ. totally enclosed non-vented, TENV). Если среда, в которой будет использоваться двигатель, не загрязнена и он будет эксплуатироваться без риска попадания на него воды, то в этом случае может быть достаточно применения каплезащищенного электродвигателя открытого исполнения (англ. open drip proof, ODP).
Выбор инвертора
Благодаря усилиям лоббистов местных энергетических компаний в сочетании с преимуществами, получаемыми при возможности регулирования скорости вращения ротора двигателей, все более распространенными становятся частотно-регулируемые приводы (ЧРП, англ. variable frequency drive, VFD). При их использовании особое внимание следует уделять генерации электромагнитных помех, которая характерна для таких приводов исходя из самой их природы. Для того чтобы электродвигатель мог использоваться с ЧРП, необходимо учитывать несколько технических особенностей, которым должен удовлетворять подходящий по остальным характеристикам электродвигатель. Среди них можно выделить две главные:
Максимально допустимое напряжение изоляции обмоточных проводов статора электродвигателя.
Электрическая прочность изоляции провода, из которого выполнена обмотка статора асинхронного электродвигателя, находится в пределах 1000–1600 В, но, как правило, в документации указывается значение прочности изоляции, равное 1200 В. Однако чем больше воздушный зазор между приводом и двигателем, тем, естественно, бо́льшим скачкам переходного напряжения, воздействующим на двигатель, он может противостоять. Электродвигатель, в котором для обмотки статора используется провод с электрической прочностью изоляции провода, равной 1600 В, может иметь ссылку на стандарт Национальной ассоциации производителей электрооборудования (NEMA, США) NEMA MG-1 2003, раздел 4, параграф 31, в котором говорится, что двигатель должен выдерживать без повреждений начальное напряжение коронного разряда (англ. corona inception voltage, CIV) уровнем до 1600 В.
Коэффициент сохранения постоянного крутящего момента (CT) двигателя, часто упоминается как «xx: 1 CT».
Этот показатель дает представление о диапазоне регулирования скорости. По нему можно узнать, насколько может быть снижена скорость вращения ротора двигателя, при которой он будет работать с сохранением того же крутящего момента (англ. CT — constant torque, постоянный крутящий момент), что и при номинальной скорости. Ниже этого значения крутящего момента производительность асинхронного электродвигателя снижается.
 Например, возьмем электродвигатель мощностью 10 л. с. с начальной скоростью 1800 об/мин. При номинальной скорости (около 1800 об/мин), как указано, он имеет крутящий момент 29 фунтов на фут. Если в спецификации на электродвигатель написано, что коэффициент сохранения номинальной мощности составляет 10:1 CT, это означает, что такой электродвигатель может обеспечить номинальный крутящий момент до скорости 180 об/мин. Если же указано, что электродвигатель имеет коэффициент сохранения номинальной мощности 1000:1 CT, то имеется в виду, что крутящий момент сможет сохранять номинальное значение до скорости 1,8 об/мин.
Например, возьмем электродвигатель мощностью 10 л. с. с начальной скоростью 1800 об/мин. При номинальной скорости (около 1800 об/мин), как указано, он имеет крутящий момент 29 фунтов на фут. Если в спецификации на электродвигатель написано, что коэффициент сохранения номинальной мощности составляет 10:1 CT, это означает, что такой электродвигатель может обеспечить номинальный крутящий момент до скорости 180 об/мин. Если же указано, что электродвигатель имеет коэффициент сохранения номинальной мощности 1000:1 CT, то имеется в виду, что крутящий момент сможет сохранять номинальное значение до скорости 1,8 об/мин.
При этом необходимо учитывать еще один нюанс, который связан с охлаждением электродвигателя. Нужно обязательно уточнить у поставщика, будет ли электродвигатель перегреваться при длительной работе на малых оборотах. Дело в том, что если двигатель охлаждается за счет крыльчатки, закрепленной на его валу, то на малых скоростях вы столкнетесь с низкой скоростью охлаждающего двигатель потока воздуха. Если асинхронный электродвигатель работает на низкой скорости и в течение длительного времени используется с большим крутящим моментом, то он будет выделять много тепла — при таких условиях, возможно, придется остановить свой выбор на двигателе с иным методом охлаждения.
Например, для организации принудительного охлаждения можно применить воздуходувное устройство, имеющее собственный, отдельно управляемый двигатель. Производительность такого устройства не связана с системой управления электропривода. В этом случае воздушный поток, который обдувает мощный электродвигатель, будет постоянным и достаточным для его охлаждения при низкой или даже при нулевой скорости.
Связь мощности и крутящего момента
При выборе асинхронного электродвигателя еще одним важным аспектом является номинальная, или основная, скорость двигателя. Обычно используются двухполюсные (3600 об/мин) и четырехполюсные (1800 об/мин) электродвигатели. Однако имеются и коммерчески доступные 6-, 8- и 12-полюсные асинхронные электродвигатели со скоростью вращения ротора 1200, 900
и 600 об/мин соответственно. Номинальная скорость асинхронного электродвигателя напрямую связана с числом полюсов, которые такой двигатель конструктивно содержит (табл.), и определяется по следующей формуле:
Об/мин = (120 × частота) / N (число полюсов)
В качестве примечания необходимо отметить, что, хотя прямой связи здесь нет, но, как правило, с увеличением количества полюсов возрастают и размеры, а также стоимость электропривода.
Кроме того, пользователям электроприводов, в зависимости от области применения данных устройств, может понадобиться обеспечить необходимый крутящий момент путем изменения скорости. В целом по мере увеличения скорости двигателя крутящий момент уменьшается, что также относится к редукторам и цепным приводам. Это соотношение объясняется следующим уравнением:
мощность (л. с.) = (крутящий момент × × номинальная скорость) / 5252
Крутящий момент, в соответствии с заданной целью, может быть достигнут путем выбора электродвигателя с необходимой мощностью и номинальной скоростью и реализован через любую цепную, ременную передачу или редуктор. Такой подход снижает стоимость привода, его габаритные размеры и время, уходящее на замену его подвижных заменяемых частей в ходе выполнения ремонта или технического обслуживания.
Число полюсов, N
Скорость, об/мин
Крутящий момент,
л. с. / фут-фунт
Асинхронные электродвигатели. Виды и устройство. Работа
Асинхронные электродвигатели были изобретены в 1889 году. В настоящее время выпускается большой спектр электрических двигателей. Из них наибольшую популярность приобрел электродвигатель асинхронного типа, трехфазный. Половина всей электроэнергии в мире расходуется такими электродвигателями. Они нашли широкое использование во многих отраслях промышленности, в быту, электроинструменте, так как имеет невысокую стоимость, повышенную надежность, простое обслуживание и эксплуатацию.
Область использования таких электромашин становиться все шире, так как их конструкция совершенствуется. В переводе с английского такой электродвигатель называют индукционным. И это легко объяснить, так как это вид моторов, в котором явление индукции применяется для создания полюсов, другими словами, применяются наводки для образования движущей силы. Особенностью асинхронных двигателей является отличие частоты поля от скорости вращения вала. В других типах двигателей используются постоянные магниты, обмотки и т.д.
Устройство
Асинхронные электродвигатели состоят из:
- Ротора.
- Статора.

Статор, состоит из основных частей:
- Корпус . Служит для образования соединений деталей мотора. При малом размере мотора корпус цельнолитой. Материал изготовления – чугун. Могут использоваться сплавы алюминия, либо сталь. Часто в небольших двигателях функцию сердечника выполняет корпус. В больших моторах со значительной мощностью корпус имеет сварную конструкцию.
- Сердечник . Эта деталь запрессована в корпус, и предназначена для повышения магнитной индукции, изготовлена из электротехнической стали в виде пластин. Для уменьшения потерь, возникающих при вихревых токах, сердечник покрывается лаком.
- Обмотка . Она расположена в пазах сердечника. Для ее намотки применяется медная проволока, секциями, соединенными между собой по определенной схеме. Витки образуют 3 катушки, которые по сути дела играют роль обмотки статора. Эта обмотка первичная, непосредственно к ней подключается питание.
Ротор:
- Ротор – элемент двигателя, находящийся во вращении, предназначен для трансформации магнитного поля в энергию движения, состоит из частей:
- Вал . Подшипники вала находятся на его хвостовиках. При сборке двигателя подшипники запрессовываются, фиксируются болтами к крышкам корпуса.
- Сердечник . Его сборку производят на валу двигателя. Он состоит из металлических пластин электротехнической стали, которая обладает свойством малого сопротивления магнитному полю. Форма сердечника в виде цилиндра используется для укладки катушки якоря, которая называется вторичной. Она получает энергию от магнитного поля, появляющегося вокруг обмоток статора при подаче питания.
Классификация по типу ротора
- С короткозамкнутым ротором.

Такой тип двигателя оснащен обмоткой в виде алюминиевых стержней, расположенных в пазах сердечника. На торце ротора они замыкаются между собой кольцами.
- С ротором, оснащенным контактными кольцами.

Оба типа моторов имеют схожую конструкцию статора. Разница состоит лишь в конструкции якоря.
Классификация по числу фаз
Асинхронные электродвигатели трехфазные являются основными типами моторов. Они оснащены 3-мя обмотками на статоре, смещены на 120 градусов, соединены между собой треугольником, либо звездой, получают питание от трех фаз переменного тока.
Асинхронные электродвигатели небольшой мощности чаще всего изготавливаются двухфазными . Они отличаются от 3-фазных моторов оснащением 2-мя обмотками на статоре, которые смещены между собой на угол 90 градусов.
В случае равенства токов по модулю, и их сдвигу по фазе на 90 градусов, действие мотора не будет иметь отличия от 3-фазного двигателя. Но такие типы двигателей чаще подключаются от однофазной сети, а искусственный сдвиг на 90 градусов образуется за счет конденсаторов.
Асинхронные электродвигатели однофазные оснащаются единственной обмоткой на статоре. Они практически не могут работать. Когда вал электродвигателя неподвижен, то при подаче питания образуется только импульсное магнитное поле, а момент вращения равен нулю. Но если ротор у такого электродвигателя принудительно раскрутить, то он сможет функционировать и приводить в действие какой-либо привод механизма.
В таком случае пульсирующее поле складывается из 2-х симметричных полей: прямого и обратного. Они образуют разные моменты: один двигательный, другой тормозной. Но двигательный момент получается больше тормозного, возникающего вследствие токов ротора высокой частоты.
В связи с этим 1-фазные моторы оснащаются второй обмоткой, применяющейся в качестве пусковой. В ее цепи для сдвига фаз подключают конденсаторы. Их емкость имеет значительную величину, и может достигать нескольких десятков мкФ при маломощном моторе, меньше 1000 ватт.
В управляющих системах применяют 2-фазные асинхронные электродвигатели, получившие название исполнительных. Они оснащены двумя обмотками статора, которые имеют сдвиг фаз на 90 градусов. Одна обмотка (возбуждения) питается от сети 50 герц, а вторая применяется в качестве управляющей.
Чтобы образовалось магнитное поле с вращающим моментом, ток в управляющей обмотке должен иметь сдвиг 90 градусов. Для регулировки скорости мотора изменяют значение тока в этой обмотке, либо меняют угол фазы. Реверсивное движение обеспечивается сменой фазы в обмотке управления на 180 градусов, с помощью переключения обмотки.
2-фазные асинхронные электродвигатели производятся в разных исполнениях:
- Короткозамкнутым ротором.
- Полым магнитным ротором.
- Полым немагнитным ротором.
Линейные моторы
Чтобы преобразовать движение вращения в поступательное движение, необходимо применение определенных механизмов. Поэтому при необходимости двигатель конструктивно выполняют таким образом, что его ротор сделан в виде бегунка с линейными движениями.
В таком случае двигатель получается развернутым. Обмотка статора такого мотора сделана, как и у обычного двигателя, но она должна быть уложена на всей длине перемещения бегунка (ротора) в пазы. Такой ротор в виде бегунка чаще бывает короткозамкнутым. К нему присоединен привод механизма. На краях статора располагают ограничители, которые не дают ротору выходить за определенные пределы.
Принцип действия
Якорь электродвигателя приводится в действие с помощью эффекта магнитного поля, возникающего в катушках статора. Для лучшего понимания принципа работы мотора, нужно освежить в памяти закон самоиндукции. Он говорит, что вокруг подключенного к питанию проводника образуется магнитное поле. Его величина прямо зависит от индуктивности проводника и потока частиц.
Также, магнитное поле образует силу, направленную в определенную сторону, которая вращает ротор мотора. Чтобы двигатель работал с достаточной эффективностью, нужно получить значительный магнитный поток. Его можно создать особой установкой первичной обмотки.
Источник напряжения выдает переменное напряжение, значит, вокруг статора магнитное поле будет с такими же свойствами, и прямо зависит от изменения тока сети. Фазы смещены между собой на 120 градусов.
Процессы в обмотке статора

Все фазы сети подключаются к катушкам статора, каждая фаза к определенной катушке. Поэтому магнитное поле будет иметь смещение на 120 градусов. Питание поступает в виде переменного напряжения, значит, вокруг катушек возникнет переменное магнитное поле.
Схема двигателя выполняется так, чтобы магнитное поле вокруг катушек постепенно менялось и переходило от одной катушки к другой. Так образуется магнитное поле с эффектом вращения. Можно определить частоту вращения, которая будет измеряться в числе оборотов вала мотора. Она вычисляется по формуле:
n = 60*f / p, где f – частота тока в сети, р – количество пар полюсов статора.
Работа ротора
Процессы во вторичной обмотке ротора, и особенность конструкции, которую имеют асинхронные электродвигатели с короткозамкнутым ротором.
К обмотке якоря напряжение не подается. Оно возникает из-за индукционной связи с первичной обмоткой. Из-за этого и происходит действие, обратное действию в статоре. Оно соответствует закону: при пересечении проводника магнитным потоком, в нем образуется электрический ток. Магнитное поле возникает вокруг первичной обмотки от того, что к ней подключается трехфазное питание.
Совместная работа ротора и статора
Мы имеем асинхронный мотор с ротором, в котором протекает электрический ток по его обмотке. Этот ток станет причиной появления магнитного поля возле обмотки якоря. Но полярность потока не будет совпадать с потоком статора. А значит, и сила, которая создается им, будет противодействовать силе магнитного поля первичной обмотки, что заставит двигаться ротор, потому что на нем выполнена вторичная обмотка, а вал закреплен на подшипниках в корпусе мотора.

Разберемся в ситуации, когда взаимодействуют силы магнитных полей ротора и статора, по истечении времени. Известно, что магнитное поле первичной катушки вращается с определенной частотой. Образованная им сила будет передвигаться с такой же скоростью. Это приводит в действие асинхронный двигатель, его ротор будет вращаться вокруг своей оси.
Подключение двигателя к питанию
Для запуска электродвигателя его нужно подключить к напряжению 3-фазного тока. Выполнить такое подключение возможно двумя методами: звездой и треугольником.
Схема звездой

Здесь изображен способ соединения треугольником.

Схемы собираются в клеммной коробке, расположенной на корпусе двигателя.
Чтобы запустить электродвигатель в обратном направлении вращения, необходимо только изменить местами две любые фазы путем перебрасывания двух проводов в коробке двигателя.