Электронный регулятор оборотов бензинового двигателя
Схема регулятора скорости бесколлекторного двигателя (ESC)
Схема условно разделена на две части: левая — микроконтроллер с логикой, правая — силовая часть. Силовую часть можно модифицировать для работы с двигателями другой мощности или с другим питающим напряжением.
Контроллер — ATMEGA168. Гурманы могут сказать, что хватило бы и ATMEGA88, а AT90PWM3 — это было бы «вааще по феншую». Первый регулятор я как раз делал «по феншую». Если у Вас есть возможность применять AT90PWM3 — это будет наиболее подходящий выбор. Но для моих задумок решительно не хватало 8 килобайт памяти. Поэтому я применил микроконтроллер ATMEGA168.
Эта схема задумывалась как испытательный стенд. На котором предполагалось создать универсальный настраиваемый регулятор для работы с различными «калибрами» бесколлекторных двигателей: как с датчиками, так и без датчиков положения. В этой статье я опишу схему и принцип работы прошивки регулятора для управления бесколлекторными двигателями с датчиками Холла и без датчиков.
Схема регулятора
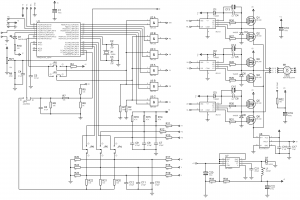
Питание
ШИМ и сигналы для ключей
Обратная связь (контроль напряжения фаз двигателя)
Датчики Холла
Измерения аналоговых сигналов
На вход ADC3(PC3) поступает аналоговый сигнал от датчика тока. Датчик тока ACS756SA. Это датчик тока на основе эффекта Холла. Преимущество этого датчика в том, что он не использует шунт, а значит, имеет внутреннее сопротивление близкое к нулю, поэтому на нем не происходит тепловыделения. Кроме того, выход датчика аналоговый в пределах 5В, поэтому без каких-либо преобразований подается на вход АЦП микроконтроллера, что упрощает схему. Если потребуется датчик с большим диапазоном измерения тока, Вы просто заменяете существующий датчик новым, абсолютно не изменяя схему.
Если Вам хочется использовать шунт с последующей схемой усиления, согласования — пожалуйста.
Задающие сигналы
Кроме того, есть вход RC сигнала, который повсеместно используется в дистанционно управляемых моделях. Выбор управляющего входа и его калибровка выполняется в программных настройках регулятора.
UART интерфейс
Прочее
Светодиод, сигнализирующий о состоянии регулятора, подключен к выводу PD4.
Силовая часть
Ключи нужно выбирать в зависимости от максимального тока и напряжения питания двигателя (выбору ключей и драйверов будет посвящена отдельная статья). На схеме обозначены IR540, в реальности использовались K3069. K3069 рассчитаны на напряжение 60В и ток 75А. Это явный перебор, но мне они достались даром в большом количестве (желаю и Вам такого счастья).
Конденсатор С19 включается параллельно питающей батареи. Чем больше его емкость — тем лучше. Этот конденсатор защищает батарею от бросков тока и ключи от значительной просадки напряжения. При отсутствии этого конденсатора Вам обеспечены как минимум проблемы с ключами. Если подключать батарею сразу к VD — может проскакивать искра. Искрогасящий резистор R32 используется в момент подключения к питающей батарее. Сразу подключаем «—» батареи, затем подаем «+» на контакт Antispark. Ток течет через резистор и плавно заряжает конденсатор С19. Через несколько секунд, подключаем контакт батареи к VD. При питании 12В можно Antispark не делать.
Возможности прошивки
- возможность управлять двигателями с датчиками и без;
- для бездатчикового двигателя три вида старта: без определения первоначального положения; с определением первоначального положения; комбинированный;
- настройка угла опережения фазы для бездатчикового двигателя с шагом 1 градус;
- возможность использовать один из двух задающих входов: 1-аналоговый, 2-RC;
- калибровка входных сигналов;
- реверс двигателя;
- настройка регулятора по порту UART и получение данных от регулятора во время работы (обороты, ток, напряжение батареи);
- частота ШИМ 16, 32 КГц.
- настройка уровня ШИМ сигнала для старта двигателя;
- контроль напряжения батарей. Два порога: ограничение и отсечка. При снижении напряжения батареи до порога ограничения обороты двигателя понижаются. При снижении ниже порога отсечки происходит полная остановка;
- контроль тока двигателя. Два порога: ограничение и отсечка;
- настраиваемый демпфер задающего сигнала;
- настройка Dead time для ключей
Работа регулятора
Включение
После включения двигатель издает 1 короткий сигнал (если звук не отключен), включается и постоянно светится светодиод. Регулятор готов к работе.
Для запуска двигателя следует увеличивать величину задающего сигнала. В случае использования задающего потенциометра, запуск двигателя начнется при достижении задающего напряжения уровня примерно 0.14 В. При необходимости можно выполнить калибровку входного сигнала, что позволяет использовать раные диапазоны управляющих напряжений. По умолчанию настроен демпфер задающего сигнала. При резком скачке задающего сигнала обороты двигателя будут расти плавно. Демпфер имеет несимметричную характеристику. Сброс оборотов происходит без задержки. При необходимости демпфер можно настроить или вовсе отключить.
Запуск
При опрокидывании двигателя или механическом заклинивании ротора срабатывает защита, и регулятор пытается перезапустить двигатель.
Запуск двигателя с датчиками Холла также выполняется с применением настроек для старта двигателя. Т.е. если для запуска двигателя с датчиками дать полный газ, то регулятор подаст напряжение, которое указано в настройках для старта. И только после того, как двигатель начнет вращаться, будет подано полное напряжение. Это несколько нестандартно для двигателя с датчиками, поскольку такие двигатели в основном применяются как тяговые, а в данном случае достичь максимального крутящего момента на старте, возможно, будет сложно. Тем не менее, в данном регуляторе присутствует такая особенность, которая защищает двигатель и регулятор от выхода со строя при механическом заклинивании двигателя.
Во время работы регулятор выдает данные об оборотах двигателя, токе, напряжении батарей через порт UART в формате:
Данные выдаются с периодичностью примерно 1 секунда. Скорость передачи по порту 9600.
Настройка регулятора
Переход регулятора в режим настройки происходит при включении регулятора, когда задающий сигнал потенциометра больше нуля. Т.е. Для перевода регулятора в режим настройки следует повернуть ручку задающего потенциометра, после чего включить регулятор. В терминале появится приглашение в виде символа «>«. После чего можно вводить команды.
Регулятор воспринимает следующие команды (в разных версиях прошивки набор настроек и команд может отличаться):
h — вывод списка команд; ? — вывод настроек; c — калибровка задающего сигнала; d — сброс настроек к заводским настройкам.
команда «?» выводит в терминал список всех доступных настроек и их значение. Например: Изменить нужную настройку можно командой следующего формата:
pwm.start=15
Если команда была дана корректно, настройка будет применена и сохранена. Проверить текущие настройки после их изменения можно командой «?«.
Измерения аналоговых сигналов (напряжение, ток) выполняются с помощью АЦП микроконтроллера. АЦП работает в 8-ми битном режиме. Точность измерения занижена намеренно для обеспечения приемлемой скорости преобразования аналогового сигнала. Соответственно, все аналоговые величины регулятор выдает в виде 8-ми битного числа, т.е. от 0 до 255.
Список настроек, их описание:
| Параметр | Описание | Значение |
|---|---|---|
| motor.type | Тип мотора | 0-Sensorless; 1-Sensored |
| motor.magnets | Кол.во магнитов в роторе двигателя. Изпользуется только для расчета оборотов двигателя. | 0..255, шт. |
| motor.angle | Угол опережения фазы. Используется только для Sensorless двигателей. | 0..30, градусов |
| motor.start.type | Тип старта. Используется только для Sensorless двигателей. | 0-без определения положения ротора; 1-с определением положения ротора; 2-комбинированный; |
| motor.start.time | Время старта. | 0..255, мс |
| pwm | Частота PWM | 16, 32, КГц |
| pwm.start | Значение PWM (%) для старта двигателя. | 0..50 % |
| pwm.min | Значение минимального значения PWM (%), при котором двигатель вращается. | 0..30 % |
| voltage.limit | Напряжение батареи, при котором следует ограничивать мощность, подаваемую на двигатель. Указывается в показаниях ADC. | 0..255* |
| voltage.cutoff | Напряжение батареи, при котором следует выключать двигатель. Указывается в показаниях ADC. | 0..255* |
| current.limit | Ток, при котором следует ограничивать мощность, подаваемую на двигатель. Указывается в показаниях ADC. | 0..255** |
| current.cutoff | Ток, при котором следует выключать двигатель. Указывается в показаниях ADC. | 0..255** |
| system.sound | Включить/выключить звуковой сигнал, издаваемый двигателем | 0-выключен; 1-включен; |
| system.input | Задающий сигнал | 0-потенциометр; 1-RC сигнал; |
| system.damper | Демпфирование входного сигнала | 0..255, условные единицы |
| system.deadtime | Значение Dead Time для ключей в микросекундах | 0..2, мкс |
* — числовое значение 8-ми битного аналого цифрового преобразователя. Рассчитывается по формуле: ADC = (U*R6/(R5+R6))*255/5 Где: U — напряжение в Вольтах; R5, R6 — сопротивление резисторов делителя в Омах.
** — числовое значение 8-ми битного аналого цифрового преобразователя. Рассчитывается по формуле: ADC = U*255/5 Где: U — напряжение датчика тока в Вольтах, соответствующее требуемому току.
Фьюзы микроконтроллера должны быть выставлены на работу с внешним кварцем. Строка для программирования фьюзов с помощью AVRDUDE:
-U lfuse:w:0xFF:m -U hfuse:w:0xDC:m
Электронный регулятор оборотов бензинового двигателя
Автоматический регулятор оборотов для двигателей типа ДПМ.
Автор: Анисимов Владимир
Опубликовано 05.10.2011
Создано при помощи КотоРед.
Решил я как-то сделать автоматический регулятор оборотов для своего моторчика, которым дырки в платах делаю, надоело на кнопку жать постоянно. Ну, регулировать как нужно, я думаю, понятно: нет нагрузки – малые обороты растет нагрузка – растут обороты.
Начал искать схему в сети, нашел несколько. Смотрю, народ часто жалуется, что с моторами ДПМ не работает, ну думаю, закон подлости никто не отменял – дай посмотрю какой у меня. Точно: ДПМ-25. Ладно, раз есть проблемы, то чужие ошибки повторять — смысла нет. Буду делать “новые“, но свои.
Решил начать с получения исходных данных, а именно, с замеров тока при различных режимах работы. Выяснилось, что мой моторчик на ХХ (холостой ход) берет 60мА, а при средней нагрузке – 200мА, и даже больше, но это уже когда начинаешь конкретно тормозить его. Т.е. рабочий режим 60-250мА. Ещё я заметил такую особенность: у данных моторов число оборотов сильно зависит от напряжения, а вот ток – от нагрузки.
Значит, нам надо следить за потреблением тока и в зависимости от его значения менять напряжение. Посидел – подумал, родился примерно такой проект:
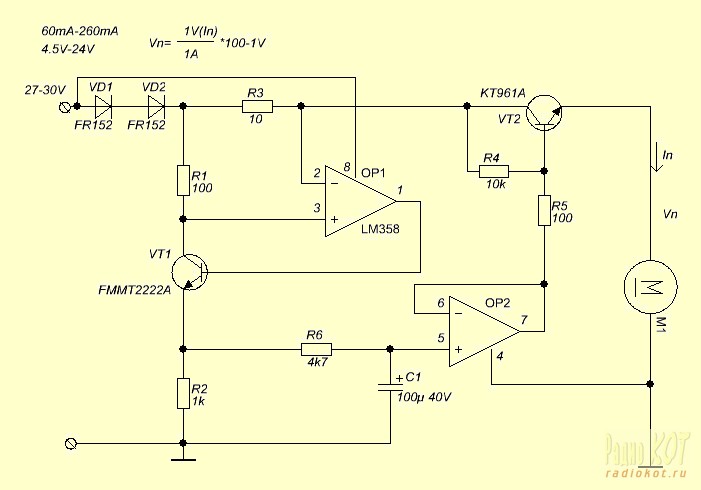
Согласно расчетам схема должна была повышать напряжение на двигателе от 5-6В на ХХ, до 24-27В при росте тока до 260мА. И соответственно понижать — при его уменьшении.
Получилось, конечно, не сразу, пришлось повозиться с подбором номиналов интегрирующей цепочки R6, C1. Ввести дополнительно диоды VD1 и VD2 (как выяснилось, LM358 плохо отрабатывает свои функции при приближении напряжений на входах к верхней границе напряжения её питания). Но, к счастью, мои мучения были вознаграждены. Результат мне очень понравился. Мотор тихонько крутился на ХХ и очень активно сопротивлялся попыткам его затормозить.
Попробовал на практике. Оказалось, на таких оборотах можно было неплохо прицелиться даже без кернения, а уж хоть с маленькой зацепкой. Причем запас регулировки был настолько велик, что число оборотов зависело от твердости материала. Пробовал на разных породах дерева, если было мягкое – максимальных оборотов не набирал, твердое – крутил на всю катушку. В итоге получалось, что независимо от материала скорость сверления была примерно одинакова. Короче, сверлить стало очень комфортно.
Транзистор VT2 и резистор R3 грелись градусов до 70. Причем первый грелся на ХХ, а второй при нагрузке. Символический радиатор в виде жестянки (она же корпус) уменьшил температуру транзистора до 42 градусов. Резистор пока оставил в таком режиме, если сгорит — заменю на 2 штуки по 5,1Ом последовательно.
Вот фото получившего устройства:



Если кто не догадался по фото, корпус – это жестянка от использованной кроны.
Да, и ещё, больше 30В на схему не подавать – это максимальное напряжение для LM358. Меньше можно – у меня нормально сверлило и на 24В.
Вот собственно и всё. Если у кого мотор более мощный надо уменьшить сопротивление R3 примерно во столько раз – во сколько раз больше у вас ток холостого хода. Если максимальное напряжение ниже 27В, надо уменьшать напряжение питания и номинал резистора R2. Это на практике не опробовано, нет у меня других двигателей, но по расчетам должно быть так. Формула приведена рядом со схемой. Коэффициент 100 верен при указанных на схеме номиналах R1, R2 и R3. При других номиналах будет такой: R2*R3/R1.
Соответственно, при значительном отличии параметров вашего двигателя от моего, возможно придется подобрать R6 и C1. Признаки такие: если мотор работает рывками (обороты то растут, то падают) номиналы надо увеличить, если схема очень задумчива (долго разгоняется, долго уменьшает обороты при изменении нагрузки) номиналы надо уменьшать.
Спасибо за внимание, желаю успехов в повторении конструкции.
Печатка прилагается.
Электробайк. Контроллер двигателя своими руками

Как вы уже знаете из прошлых постов, у нас в компании есть DIY-движение. В свободное от работы время коллеги занимаются фрезеровкой печатных плат в домашних условиях, делают тепловизор на FLIR Lepton, а также решают семейные разногласия с помощью 4 контроллеров и 2 умных часов. Продолжим серию увлекательный историй! Сегодня я расскажу, как сделать контроллер к трехфазному двигателю электровелосипеда своими руками. Целью создания такого контроллера было:
- Изучение работы трехфазного мотора под управлением контроллера.
- Большинство контроллеров для электровелосипедов, представленных на рынке, — китайские. Они хоть и относительно дешевые (около 2.000 руб в зависимости от мощности), но являются неведомой коробкой, в которой неизвестно что происходит. И сразу к ней возникает очень много вопросов — экономично ли она потребляет и распределяет ток, какой у нее запас мощности, почему так сильно перегревается, преждевременно срабатывает защита по току и т.д.
В тоже время на рынке представлены европейские качественные контроллеры для электробайков. Они оснащаются расширенными функциями, работают на разных напряжениях и токах и их можно программировать. Устанавливаются они на сверхмощные электровелосипеды. Но цена у них кусается — 10-20 тыс. рублей.
В итоге я решил пойти своим путем: разобраться в устройстве контроллера, сделать его прототип, а затем попытаться сделать контроллер качественнее китайского контроллера. На текущий момент проект у меня в разработке только и на уровне прототипа, готового варианта пока нет. Буду рад услышать ваши комментарии и советы.
Применение
В электровелосипедах используются трёхфазные бесщёточные электродвигатели с датчиками Холла. Стоит отметить, что применение подобных трёхфазных двигателей достаточно обширно:
- Бытовая техника
- Оргтехника
- Электротранспорт
- Промышленность
Устройство двигателя
Для разработки контроллера необходимо разобраться с принципом работы самого электродвигателя.

Электродвигатель состоит из фазных обмоток, магнитов и датчиков Холла, отслеживающих положение вала двигателя.
Конструктивно электродвигатели делятся на два типа: инраннеры и аутраннеры.

У инраннеров магнитные пластины крепятся на вал, а обмотки располагаются на барабане (статоре), в этом случае в движение приводится вал. В случае аутраннера всё наоборот: на валу — фазные обмотки, а в барабане — магнитные пластины. Это приводит в движение барабан.
Так как у велосипеда колесо крепится валом на раму, то здесь применителен тип аутраннера.
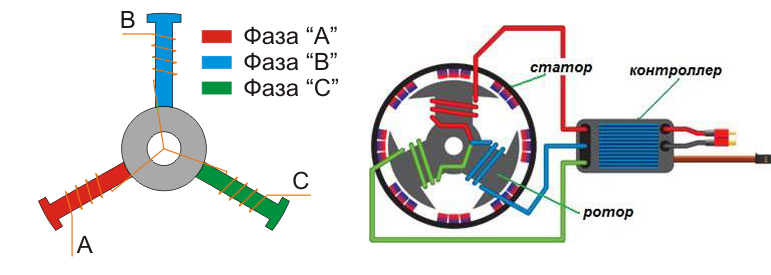
На этой картинке условно представлены три фазы с обмотками, соединёнными между собой. В реальности обмоток намного больше, они располагаются равномерно с чередованием по фазам по окружности двигателя. Чем больше обмоток — тем плавнее, чётче, эластичнее работает двигатель.
В двигатель устанавливаются три датчика Холла. Датчики реагируют на магнитное поле, тем самым определяя положение ротора относительно статора двигателя. Устанавливаются с интервалами в 60 или 120 электрических градусов. Эти градусы относятся к электрическому фазному обороту двигателя. Необходимо учитывать, что чем больше в двигателе обмоток на каждую фазу, тем больше происходит электрических оборотов за один физический оборот мотор-колеса.

Обмотки трёх фаз в большинстве случаев соединяются между собой по двум схемам: звезда и треугольник. В первом случае ток проходит от одной из фаз к другой, во втором — по всем трём фазам в разной степени. Иногда эти две схемы подключения комбинируют в одном двигателе, например в электромобилях. При старте и наборе скорости идёт соединение фаз по звезде: она даёт больший момент при относительно низких оборотах; далее, после набора скорости, происходит переключение на треугольник, в результате количество оборотов увеличивается, когда уже не нужен большой крутящий момент. По сути, получается условно автоматическая коробка передач электродвигателя.
Цикл работы
Чтобы привести в движение трёхфазный двигатель, нужно рассмотреть цикл его работы за электрический оборот. Итак, имеем три фазы — A, B, C. Каждая из фаз получает положительную и отрицательную полярности в определённый момент времени. Поочерёдно по шагам пропускается ток от «плюса» одной фазы к «минусу» другой фазы. В итоге получается шесть шагов = три фазы × две полярности.
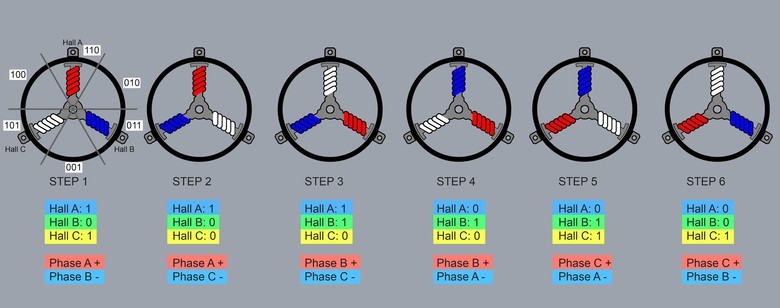
Рассмотрим эти шесть шагов цикла. Предположим, что положение ротора установлено в точке первого шага, тогда с датчиков Холла мы получим код вида 101, где 1 — фаза А, 0 — фаза B, 1 — фаза С. Определив по коду положение вала, нужно подать ток на соответствующие фазы с заданными полярностями. В результате вал проворачивается, датчики считывают код нового положения вала — и т. д.
В таблице указаны коды датчиков и смена комбинаций фаз для большинства электродвигателей. Для обратного хода колеса (реверса) достаточно перевернуть знаки полярности фаз наоборот. Принцип работы двигателя довольно прост.
Цикл двигателя представлен в gif-анимации.
Транзисторы и Н-мост
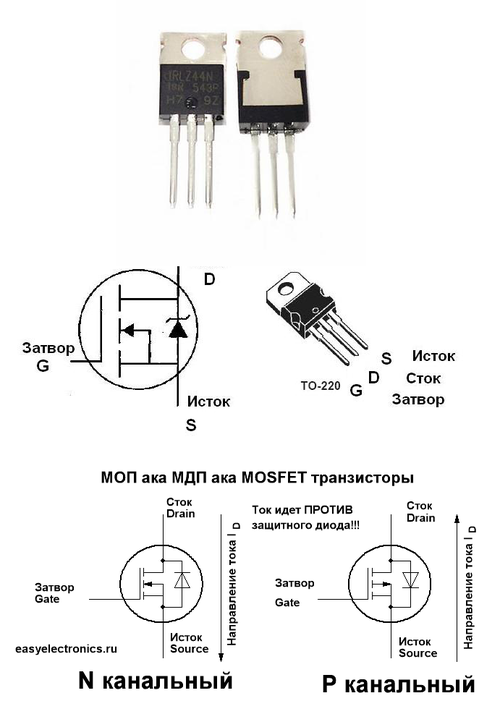
Но чтобы поочерёдно подавать ток на каждую из фаз и менять их полярность, необходимы транзисторы. Ещё нам нужна передача больших токов, высокая скорость переключения и чёткость открытия/закрытия затворов. В данном случае удобнее управлять затворами по напряжению, а не по току. Поэтому оптимальны полевые (MOSFET) транзисторы. Чаще всего их используют в контроллерах. Очень редко можно встретить комбинированный вариант транзисторов.
Для переключения фаз со сменой их полярностей используют классическую схему Н-моста (H-Bridge) из полевых транзисторов.
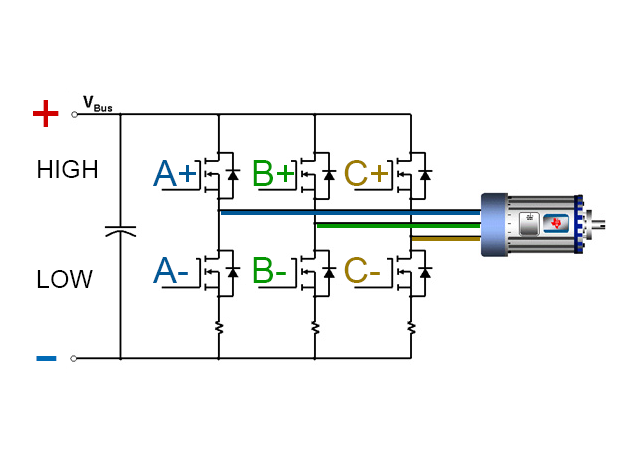
Он состоит из трёх пар транзисторов. Каждая из пар подключается к соответствующей фазе обмотки двигателя и обеспечивает подачу тока со значением (+ или –). Транзисторы, отвечающие за включение фазы с положительным значением, называют верхними ключами. С отрицательным — нижними. Для каждого шага открывается пара ключей: верхний одной фазы и нижний соседней фазы. В результате ток проходит от одной фазы к другой и приводит электродвигатель в движение.
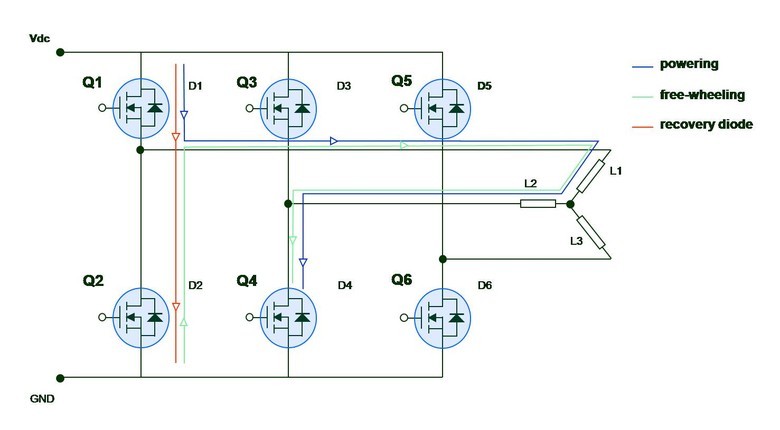
Из схемы видно, что мы не можем включить одновременно верхний и нижний ключ у одной и той же фазы: произойдёт короткое замыкание. Поэтому очень важно быстрое переключение верхних и нижних ключей, чтобы в переходных процессах не появилось замыкание. И чем качественнее и быстрее мы обеспечим переключения, тем меньше у нас будет потерь и нагрева/перегрева транзисторов H-моста.
Для запуска остаётся обеспечить управление затворами ключей H-моста. Для управления H-мостом нужно:
- Считать показания датчиков Холла.
- Определить, в каком положении какую пару ключей включать.
- Передать сигналы на соответствующие затворы транзисторов.
Прототип на Ардуино
Под рукой у меня была Arduino UNO, и я решил собрать контроллер на её основе.
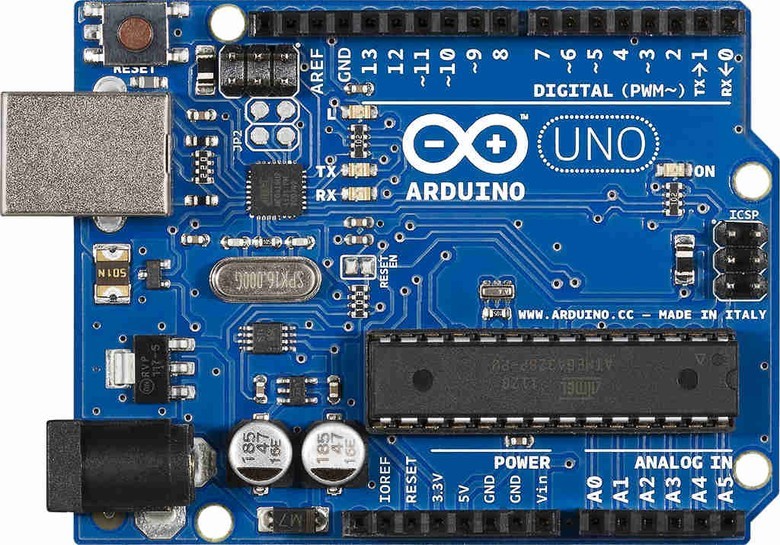
Первым делом я подал на датчики Холла питание 5 вольт от Ардуино (его достаточно для датчиков). Сигнальные провода от датчиков подключил на цифровые пины Ардуино, написав простейшую программу для считывания и обработки сигналов с датчиков.
Затем собрал Н-мост из полевых NPN-транзисторов. Подвёл к мосту независимое питание на 12 вольт. Но при отладке, чтоб убедиться в работоспособности, я подключил напрямую шесть пинов 5V из Ардуино на затворы H-моста. У большинства полевых транзисторов затвор работает на 20 вольт. Так делать нельзя, потому что Н-мост будет плохо работать и перегреваться. Но для кратковременных тестов это пойдёт. Кое-как, с сильными перегревами и страшными звуками, вибрациями и толчками колесо медленно закрутилось. Начало положено.
Мостовые драйверы
Далее предстояла работа над напряжением 20 вольт на управление затворами. Для этого существуют мостовые драйверы транзисторов, они обеспечивают стабильные импульсы в 20 вольт на затвор и высокую скорость отклика. Сначала у меня были популярные драйверы для маломощных моторов L293D.
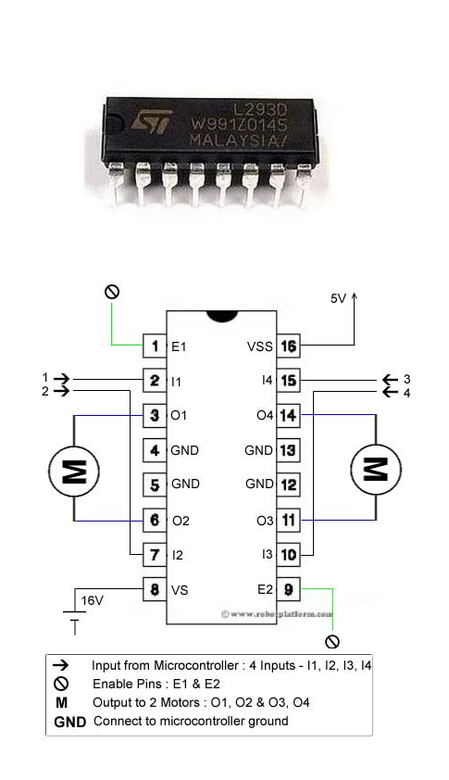
Для управления затворами его достаточно, к тому же их очень просто использовать. Один такой драйвер может обеспечить питанием две пары ключей. Поэтому я взял две штуки L293D. Собрал контроллер с этими драйверами, и колесо начало крутиться существенно плавнее, посторонних звуков стало меньше, нагрев транзисторов уменьшился. Но при увеличении оборотов синхронизация с контроллером пропадала, появлялся посторонний звук, колесо дёргалось, вибрировало и полностью останавливалось.
В это же время я наткнулся на два варианта мостовых драйверов:
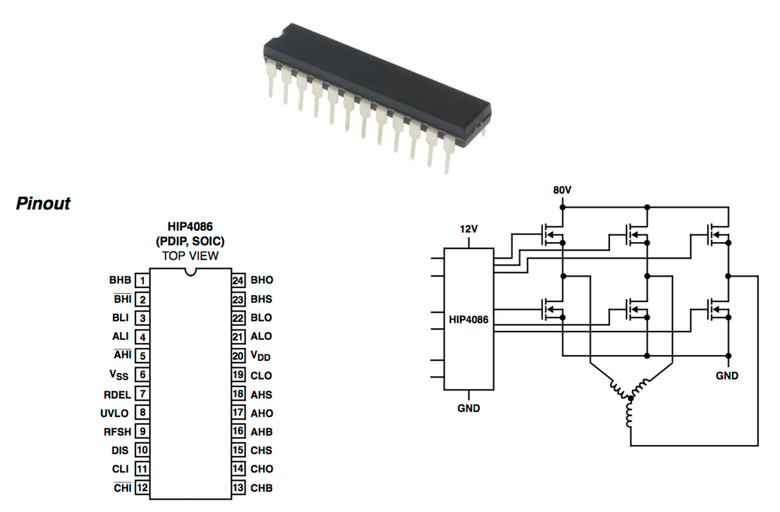
- HIP4086

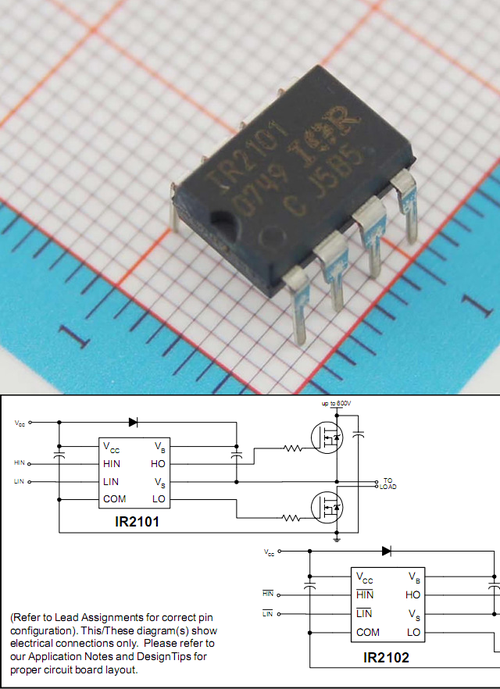
- IR2101
Что касается HIP4086, то это полноценный мостовой драйвер, предназначенный для трёхфазного электродвигателя. Мне он показался несколько замороченным, и мои попытки использовать его в контроллере не увенчались успехом: он у меня так и не заработал. Углублённо разбираться в причинах не стал.
А взял я IR2101 — полумостовой драйвер, обеспечивающий работу нижнего и верхнего ключей для одной фазы. Несложно догадаться, что таких драйверов нужно три. К слову, драйвер очень прост в использовании, его подключение происходит безболезненно и легко. Получилась такая схема:
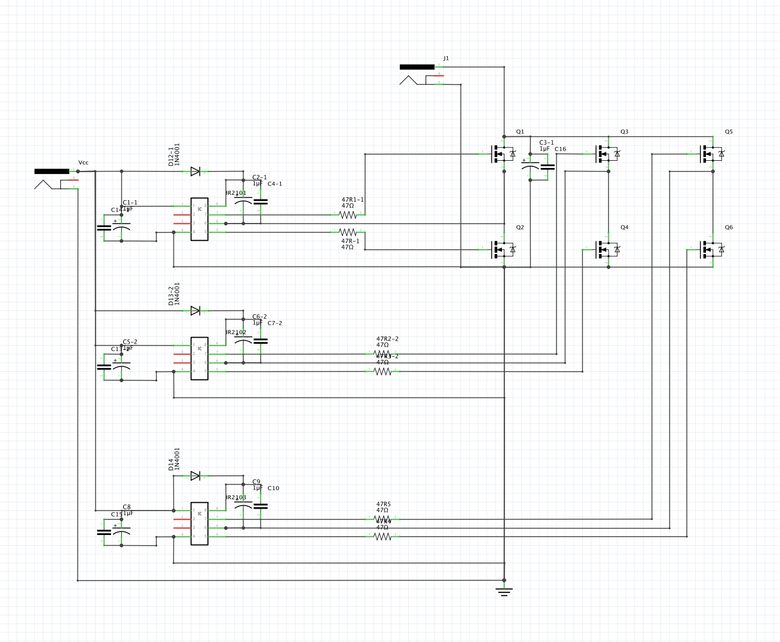
И готовый результат
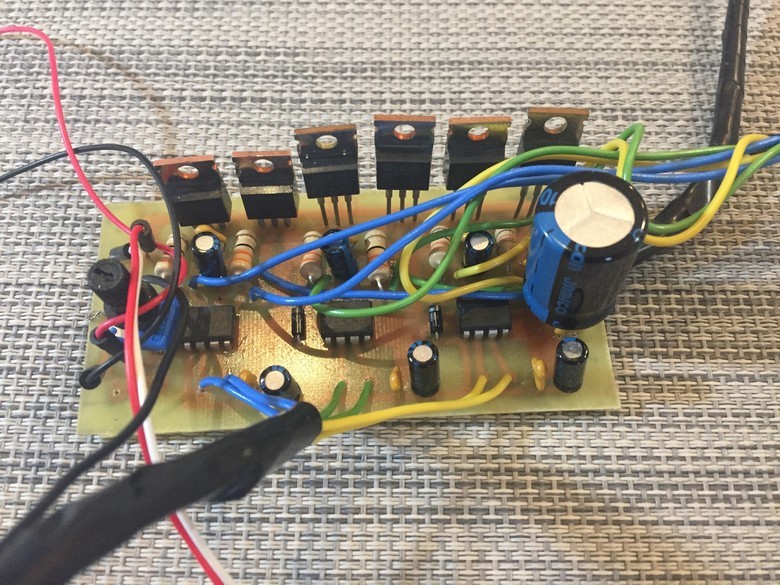
Собрал контроллер с этим драйвером и запустил двигатель. Ситуация с работой электродвигателя кардинально не поменялась, симптомы остались те же, как и в случае с драйвером L293D.
Аппаратное прерывание
И тут я понял, в чём дело: Ардуино не успевает обрабатывать показания датчиков Холла! Поэтому необходимо было использовать пины Ардуино с аппаратным прерыванием. Так как у Ардуино УНО таких пинов всего два, а под датчики нужно три пина, надо взять Ардуино Леонардо или Искра Нео, где таких пинов — четыре штуки.
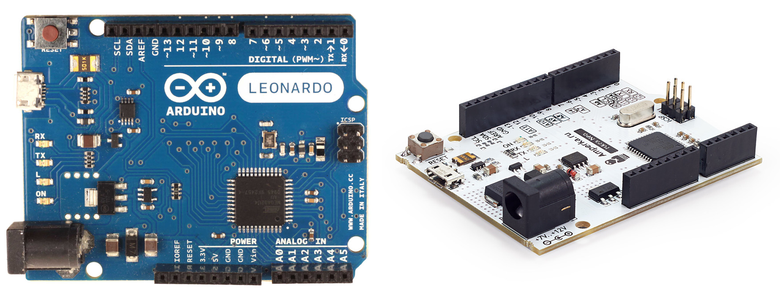
Переписав программу под прерывания и подключив Искру Нео вместо УНО, я повторил испытания.
Колесо наконец-то заработало чётко, без вибраций, шумов, отлично стало набирать обороты без рассинхронизации. Прототип оказался жизнеспособным. Но это ещё не полноценный контроллер, поскольку в нём не было обвязки с защитами и обеспечением качественного ШИМ-сигнала.
Прототип на базе микросхемы MC33035
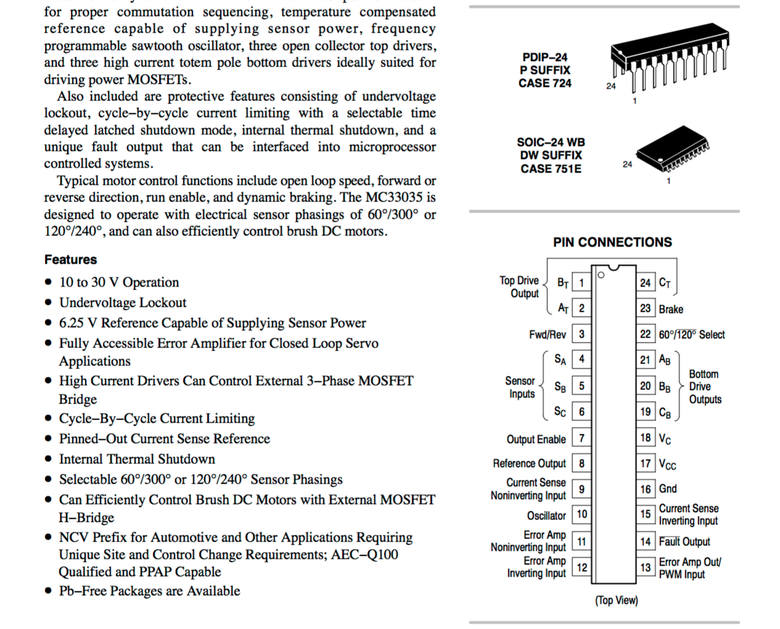
Параллельно с разработкой контроллера на Ардуино я рассматривал альтернативные варианты логической части контроллера. И это привело меня к микросхеме MC33035. Это старая разработка от Motorola, сейчас её выпускает ON Semiconductor. Создана специально для мощных трёхфазных двигателей.
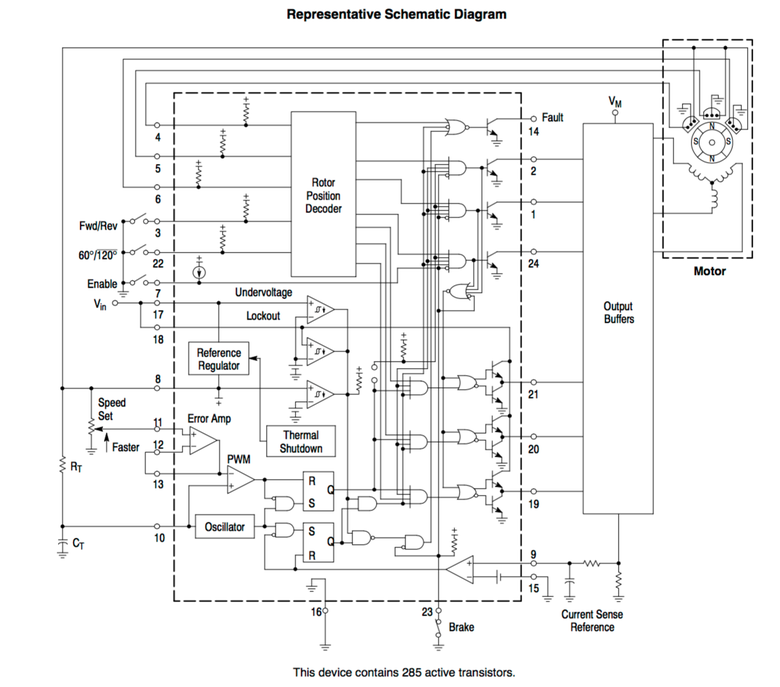
- Отвечает за всю логическую часть контроллера
- Считывает показания с датчиков Холла
- Определяет положения вала
- Выдаёт сигналы для затворов Н-моста на их драйверы
- Имеет возможность подключения индикатора ошибок, перегрева
- Обрабатывает и передает ШИМ-сигнал (PWM)
- Осуществляет реверс (обратный ход колеса)
Одним словом, микросхема содержит всё необходимое для управления электродвигателем. Её стоимость очень низкая: на Алиэкспрессе — около 50 рублей. Для сборки полноценного контроллера на её основе потребуется микросхема MC33035, полумостовые драйверы и Н-мост из полевых транзисторов. Я также собрал контроллер на этой микросхеме. Работает отлично, стабильно, колесо крутится как надо на различных оборотах. Но функционал микросхемы ограничен, если необходимо наворотить различные функции, вывод на дисплей скорости, одометр, расход батареи, то опять же возникает необходимость дополнительно подключить Ардуино или что-то аналогичное.
Схема с MC33035
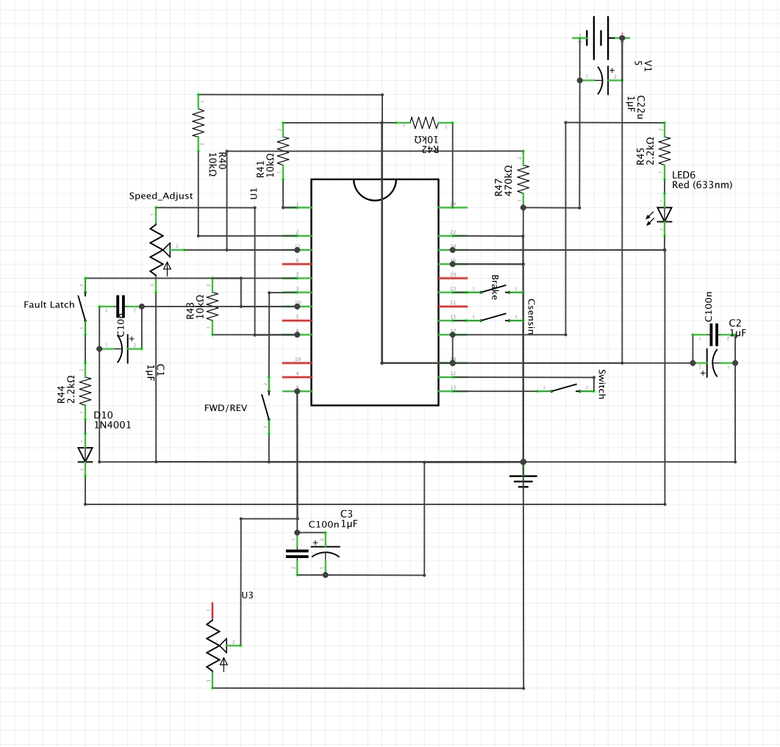
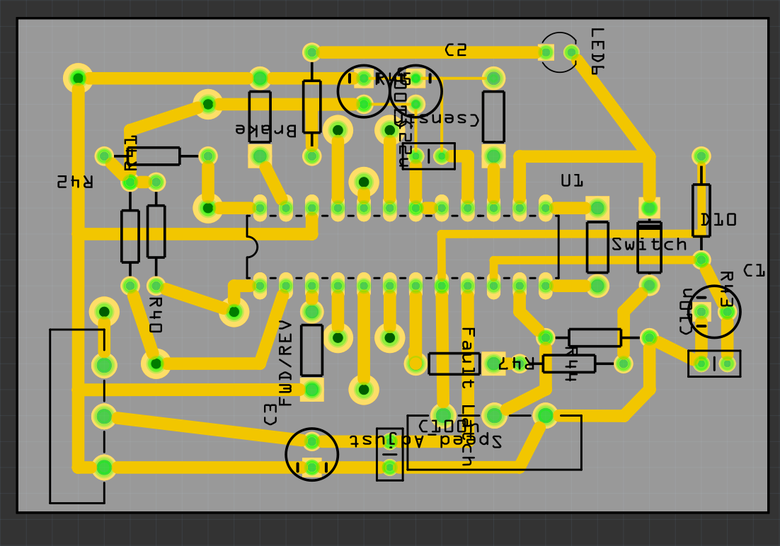
Главное преимущество контроллера на базе MC33035 — это простота в использовании. Просто покупаете микросхему, собираете Н-мост, спаиваете всё на плату с небольшой обвязкой — и контроллер готов. Если нужно просто запустить двигатель с ШИМ-сигналом и управлять им — оптимальный вариант.
Контроллер на базе Ардуино — вариант сложнее, понадобится писать логику, обеспечивать дополнительные защиты контроллера. Но для экспериментов, прототипов, дополнительного функционала, использования различных режимов работы двигателя — подходящий вариант. Поэтому я решил пока отложить MC33035 и продолжить работу с Ардуино.
Планы на будущее контроллера
Продолжая работу над контроллером, планирую сделать следующее:
- IGBT-транзисторы для H-моста вместо полевых транзисторов.
- Обвязку с защитами по току, перегреву и т. п.
- Полноценный круиз-контроль с возможностью выставлять необходимую скорость движения.
- Расходомер. Когда задаётся необходимое расстояние, а контроллер, исходя из этого значения и заряда аккумулятора, дозирует разряд аккумулятора на всём протяжении маршрута так, чтобы зарядки хватило.
Электронный редуктор или как кардинально увеличить крутящий момент коллекторного двигателя переменного тока на низких оборотах. Часть 1
Atmel U2008B U2010B
В статье приведены принципиальные схемы, разводка плат и фотографии устройств регуляторов-стабилизаторов скорости вращения мини дрелей на базе микросхем U2010B / U2008B. Стабилизация скорости вращения коллекторных двигателей переменного тока, примененных в этих дрелях, дала возможность в разы увеличить их крутящий момент, что позволило существенно расширить сферу применения подобных дрелей и использовать их в таких режимах работы, которые ранее были для них недоступны (сверление отверстий, распиловка, заточка). Показаны примеры применения сконструированных устройств совместно с мини дрелями.


Введение
Коллекторные двигатели постоянного и переменного тока, как известно, обладают одним общим свойством: при увеличении напряжения, подаваемого на такие двигатели, увеличиваются их скорость и крутящий момент. Причем, на холостом ходу, то есть без нагрузки на вал, или, другими словами, при нулевом тормозном моменте, скорость вращения таких двигателей (а особенно двигателей переменного тока) может достигать достаточно высоких значений – до десятков тысяч об/мин. В то же время при сверлении отверстий, например, электродрелью от двигателя требуется повышенный крутящий момент, который тем больше, чем толще сверло. При этом для более точного позиционирования сверла и, особенно, для приемлемого режима сверления скорость вращения должна быть достаточно низкой (несколько сот об/мин). В связи с этим в электродрели устанавливают механический редуктор, снижающий скорость вращения вала и одновременно увеличивающий его крутящий момент в десятки и даже в сотни раз (особенно в дрелях-шуруповертах). Если же двигатель используется в инструментах для заточки (например, сверл) или резки каких-либо материалов (например, в циркулярной пиле), то есть на его валу установлен абразивный точильный или отрезной круг, то сверхвысокая скорость вращения двигателя на холостых оборотах (например, 30000 об/мин) может привести к разрушению таких кругов (они могут просто разлететься на куски, что уже травмоопасно). В связи с этим, при эксплуатации подобных кругов для них указывается максимальная скорость их вращения. Однако если снизить скорость вращения двигателя до приемлемого уровня путем подачи на двигатель пониженного напряжения, то одновременно снизится и крутящий момент. А поскольку тормозной момент круга часто на порядок больше аналогичного момента сверла, так как их диаметры могут отличаться на порядок, то при низкой скорости вращения и, соответственно, малом крутящем моменте при достаточном тормозном моменте такой круг может просто остановиться. В связи с этим в подобных устройствах, так же как и в электродрелях, может понадобиться установка механического редуктора.
Механический редуктор, устанавливаемый, например, в электродрели, как известно, представляет собой устройство, состоящее из нескольких стальных шестерен, укрепленных на осях с подшипниками. Поскольку редуктор имеет некоторые габариты и вес, естественно, габариты и вес таких дрелей несколько увеличены (до 2 кг и более), но при ручном сверлении отверстий это не представляет особой проблемы. Однако если для более прецизионных сверловочных работ используется стойка для дрели, то установка подобной дрели с редуктором в такую стойку уже представляет некоторую проблему. В основном это связано с относительно большими габаритами и весом подобных дрелей и, кроме того, их рукоятка существенно мешает работе. Здесь вне конкуренции более легкая (не более 1 кг) и компактная так называемая мини дрель (её ещё называют прямой шлифовальной машиной, гравером и т.п.). Такое устройство представляет собой просто коллекторный электродвигатель (постоянного или переменного тока) без редуктора (и без рукоятки), на валу которого укреплен патрон для зажатия сверл (или иных насадок, например, отрезных или точильных абразивных дисков). В стойке для дрели подобное устройство закрепляется специальным зажимом (хомутом).
В то же время, как уже упоминалось, сверхвысокие скорости вращения электродвигателей подобных устройств на холостом ходу и низкий крутящий момент на малых и средних скоростях при сверлении отверстий, при разрезке (циркулярная пила) или заточке (точило), не позволяют их использовать в таких режимах работы. Однако эту проблему можно решить более простым и эффективным электронным способом.
Этот способ заключается в стабилизации скорости вращения вала электродвигателя вне зависимости от тормозного момента, или, другими словами, при увеличении тормозного момента на двигатель подается бóльшая мощность, отчего соответственно увеличивается крутящий момент, и установленная скорость вращения вала остается прежней (или, по крайней мере, к ней стремится).
Электронный стабилизатор скорости вращения коллекторных электродвигателей представляет собой устройство, имеющее несложную электронную схему, основу работы которой составляют электрические эффекты, возникающие в электродвигателях при торможении их вала. Что это за эффекты?
Если, например, в электродвигателе постоянного тока попытаться затормозить вал, то возникнет так называемая противо-ЭДС – дополнительное напряжение определенной формы, которое можно использовать для увеличения мощности, подаваемой на двигатель. В работе автора [1] показано, что если питать подобный двигатель выпрямленным напряжением 12 – 18 В частотой 50 Гц (то есть, пульсирующим с частотой 100 Гц), и использовать для подачи на двигатель часть этого напряжения с помощью тиристора, на управляющий электрод (УЭ) которого подавать импульсы для его открытия в определенное время, зависящее от противо-ЭДС, то таким способом можно решить подобную задачу, или, другими словами, стабилизировать скорость вращения двигателя. В схеме [1] входное напряжение подается на двигатель через тиристор, а простейшая RC-цепочка подключена к аноду и катоду тиристора. Напряжение, снятое с конденсатора C, подается на базу npn-транзистора, коллектор которого подключен к аноду тиристора, а эмиттер – к УЭ тиристора. При торможении вала двигателя возникает противо-ЭДС, которая с помощью транзистора включает тиристор раньше, вследствие чего на двигатель подается бóльшая площадь полусинусоиды (выпрямленного напряжения), отчего крутящий момент увеличивается, и, таким образом, скорость вращения вала остается прежней, то есть той, которая изначально была установлена.
Но коллекторный двигатель переменного тока (его еще называют универсальным, поскольку он может работать и от напряжения постоянного тока), используемый в мини дрелях, работающих от сетевого напряжения
220 В, устроен иначе, чем двигатель постоянного тока. Основное отличие этих двигателей – устройство статора. Если в двигателях постоянного тока магнитное поле статора, как правило, постоянно, поскольку статор представляет собой постоянный магнит кольцевой формы, то в двигателях переменного тока статор (как и ротор) является электромагнитом. Часто в таких двигателях в качестве статора используются два электромагнита, обмотки которых подключены последовательно с обмотками ротора (с помощью щеток), или, другими словами, сетевое напряжение подается на одни концы обмоток, а вторые их концы подключены к щеткам (коллектору) ротора. Направление обмоток статора и ротора выбрано таким образом, что при любой полуволне переменного напряжения магнитное поле заставляет вращаться ротор в одну и ту же сторону. Кстати, если поменять направление обмоток статора, то вал будет вращаться в обратную сторону. Это свойство используется в дрелях и шуруповертах для так называемого реверса – переключения направления вращения в обратную сторону. В такой конфигурации двигателя при его торможении, к сожалению, противо-ЭДС не возникает (или возникает, но очень слабая). Поэтому все попытки автора применить к такому двигателю схему, описанную в [1], ни к чему не привели.
К счастью, для стабилизации скорости вращения подобных двигателей, работающих от сетевого напряжения
220 В, в свое время немецкой компанией Telefunken (Temic Semiconductors) была разработана специализированная микросхема U2010B и ее несколько упрощенный вариант U2008B. Впоследствии эти микросхемы выпускались компанией Atmel, которая больше известна как разработчик микроконтроллеров. Микросхемы U2008B/U2010B используют иной эффект коллекторных двигателей переменного тока, возникающий при торможении их вала. Этот эффект состоит в том, что при торможении вала ток через двигатель увеличивается. Если этот ток пропустить через токоизмерительный резистор достаточно малого номинала (десятые доли Ома), измерить напряжение на этом резисторе и, в зависимости от этого напряжения, открывать симистор раньше или позже, то таким способом можно достаточно просто стабилизировать скорость вращения двигателя. Фактически на этих микросхемах организован хорошо известный из теории автоматического управления (ТАУ) так называемый ПИД-регулятор (Пропорционально-Интегрально-Дифференциальный регулятор) – устройство в цепи обратной связи, используемое в системах автоматического управления для поддержания заданного значения измеряемого параметра. Такой ПИД-регулятор обладает одним неприятным свойством (впрочем, присущим всем ПИД-регуляторам) – так называемым перерегулированием, проявляющимся в том, что при торможении вала двигателя его скорость может не только оставаться прежней (как на холостом ходу), но даже увеличиваться (и очень существенно). Кроме того, она может и осциллировать с небольшой частотой. Все зависит от соответствующей настройки. Сами микросхемы U2008B/U2010B достаточно распространены, недороги, и в Интернете можно найти массу схем стабилизаторов скорости вращения двигателей переменного тока на базе этих микросхем. Однако все подобные схемы в качестве исходных используют базовые схемы, приведенные в справочных листках на микросхемы U2008B/U2010B, и, кроме того, сконструированы (схемы) на устаревшей элементной базе. Здесь необходимо особо подчеркнуть, что сами по себе схемы хорошо известны, и главное заключается не в самих схемах, а в номиналах и типах компонентов в них входящих, а также в их настройке. В связи с изложенным автором разработаны конкретные устройства на базе этих схем, которые показали достаточно удовлетворительную работу. Описание таких устройств и их настройка с конкретными двигателями переменного тока и является предметом настоящей статьи.
Таким образом, дальнейшее изложение будет построено следующим образом. Вначале будут рассмотрены принципиальные схемы устройств – стабилизаторов скорости вращения электродвигателей на базе микросхем U2008B/U2010B, описан принцип их работы и настройка. Затем будут приведены разводка плат, их фотографии, а также фотографии самих устройств. Далее будут показаны примеры применения этих устройств с конкретными двигателями, а именно: с двигателем, установленным в стойку для дрели, и с двигателем, на базе которого сконструирована небольшая циркулярная пила и точильный станок (последние две опции объединены в одном общем устройстве).
Предварительные замечания о некоторых механических и электрических характеристиках электродвигателей
Как известно, крутящий момент двигателя, рассматриваемого в настоящей статье, в зависимости от частоты его вращения нелинеен. Он имеет два максимума: один – при нулевой частоте, то есть при полностью заторможенном двигателе, второй – при относительно высоких частотах, приближающихся к максимальной. Наиболее интересен диапазон низких частот вплоть до нулевой (особенно в режимах сверления), а диапазон высоких частот, как в режимах разрезки (циркулярная пила), заточки (точило), так и в режимах сверления в свете настоящей статьи интереса не представляет, поэтому далее не рассматривается.
Кроме того, крутящий момент, M, пропорционален квадрату тока, I, протекающего через двигатель, то есть M = kI 2 , где k – коэффициент пропорциональности. Этот факт также хорошо известен и будет использован при дальнейшем изложении.
В качестве «подопытных кроликов» для проверки работоспособности устройств на базе микросхем U2008B/U2010B были выбраны две мини дрели: «TUNGFULL 1806B» и «SKRAB 56000». Это две недорогие мини дрели не имеют редуктора и рукоятки; кроме того, они относительно легки (не более 1 кг). По своим параметрам эти мини дрели, на взгляд автора, как нельзя лучше подходят для использования в устройствах стабилизаторов скорости вращения на базе микросхем U2008B/U2010B.
В паспорте на мини дрель, как правило, указывается её рабочее напряжение питания, мощность, а также скорость вращения (или ее диапазон, если она оборудована электронным переключателем скорости) на холостом ходу. Например, у двигателя мини дрели «SKRAB 56000» напряжение составляет 220 В, мощность 480 Вт, скорость 8000-30000 об/мин (он оборудован переключателем скоростей на базе простейшей схемы на симисторе). У двигателя мини дрели «TUNGFULL 1806B» при том же напряжении питания мощность составляет 260 Вт, а скорость вращения 27,600 об/мин.
Поскольку, как указывалось во введении, микросхемы U2008B / U2010B в качестве одного из параметров, влияющих на регулирование скорости вращения, используют ток, протекающий через двигатель, имеет смысл более подробно рассмотреть диапазон токов вышеуказанных мини дрелей.
Наибольший ток (см. выше) имеет двигатель в полностью заторможенном состоянии. Как определить этот ток, и как он связан с паспортной мощностью мини дрели? Для этого автором был проведен несложный эксперимент, сводящийся к следующему.
С помощью лабораторного автотрансформатора (ЛАТРа) на дрель подавалось переменное напряжение, измеряемое стрелочным тестером; одновременно измерялся и ток (также переменный, то есть в режиме AC) с помощью цифрового тестера. Вначале напряжение устанавливалось достаточно низким (40–50 В), чтобы вал можно было легко затормозить, а затем напряжение быстро увеличивалось до 220 В, и при заторможенном вале, удерживаемом не более 1–2 секунд, снималось показание тока. Эксперимент показал следующее. При полностью заторможенном двигателе и напряжении 220 В ток двигателя дрели «TUNGFULL 1806B» составил около 3 А, а ток двигателя дрели «SKRAB 56000» составил около 2.8 А. Нетрудно подсчитать, что мощность, W, дрели «TUNGFULL 1806B» составила: W = 3 A × 220 В = 660 Вт (против паспортной 260 Вт), а мощность дрели «SKRAB 56000»: W = 2.8 A × 220 В = 616 Вт (против паспортной 480 Вт). Как видно из этого эксперимента, мощности дрелей при полностью заторможенном двигателе существенно превышают паспортные.
Автор задался вопросом: a при каких напряжениях питания мощности заторможенных двигателей дрелей соответствуют паспортным? Это было выяснено путем подачи разных напряжений (ниже 220 В) и одновременного измерения тока.
Вот результат. У дрели «TUNGFULL 1806B» при напряжении питания 138 В ток составил 1.88 А, а мощность: 138 В × 1.88 А = 259.4 Вт (≈260 Вт). У дрели «SKRAB 56000» при напряжении 190 В ток составил около 2.5 А, а мощность: 190 В × 2.5 А = 475 Вт (≈480 Вт). Вот эти значения токов и напряжений (1.88 А и 138 В для дрели «TUNGFULL 1806B» и 2.5 А и 190 В для дрели «SKRAB 56000») и были использованы в дальнейшем при расчете номиналов токоизмерительных резисторов, о которых упоминалось выше.
Теперь после этих предварительных пояснений перейдем к принципиальным схемам устройств.