

Асинхронный двигатель принцип работы pdf
Тяговый асинхронный двигатель.
Основные технические данные двигателя.
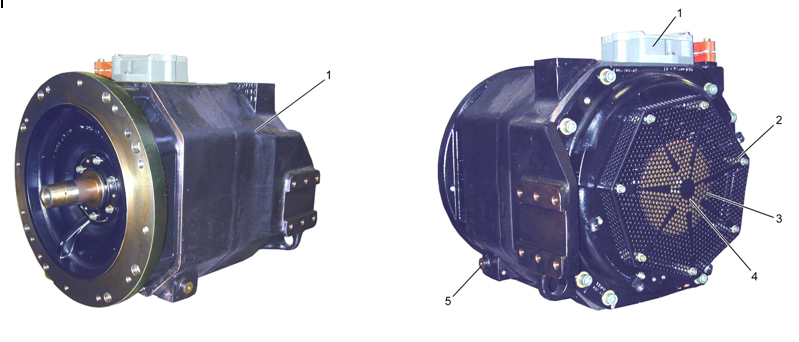 Мощность часового режима – 170кВт, частота вращения часового режима – 1290 об/мин, номинальное напряжения питания – 530 В, номинальная частота – 43 Гц, масса – 805 кг.
Мощность часового режима – 170кВт, частота вращения часового режима – 1290 об/мин, номинальное напряжения питания – 530 В, номинальная частота – 43 Гц, масса – 805 кг.
3-х фазный двигатель, самовентилируемый с короткозамкнутым ротором. Тяговые двигатели, установлены на вагонах 81-740/741, с опорой только на раму тележки, что снижает ударные нагрузки на двигатель при прохождении неровностей и стыков ходовых.
Двигатели могут работать как электродвигателями так и генераторами. В первом случае электрическая энергия, потребляемая от контактной сети (3-ий рельс), преобразуется в механическую, развивая при этом вращающий момент на валу двигателя.
Во втором случае двигатель преобразует, приведенную к валу механическую энергию от вращения колесных пар в электрическую, которая может быть вновь возвращена в контактную сеть (рекуперативное торможение) или гасится на тормозном реостате (сопротивление), при реостатном электрическом торможении.
Асинхронная электрическая машина характеризуется тем, что при ее работе возбуждается вращающее магнитное поле, которое вращается асинхронно относительно скорости вращения ротора.
Устройство тягового двигателя.
Тяговый двигатель состоит из: статора, ротора, двух подшипниковых щитов, вентилятора. 
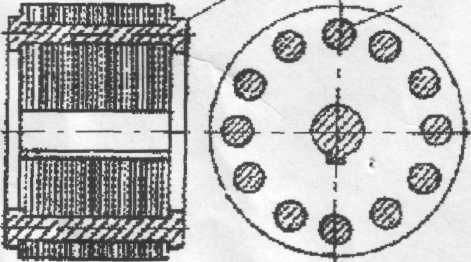
Статор(неподвижная часть) – предназначен для укладки в него обмотки. Имеет форму полого цилиндра, собранного из пластин электротехнической стали, толщиной 0,5мм, изолированных друг от друга слоем лака, что обеспечивает уменьшение потерь от вихревых токов.
Фазные обмотки, которые возбуждают вращающее магнитное поле, размещаются в пазах на внутренней стороне сердечника статора. Обмотка статора подсоединяется к 3-х фазному источнику переменного тока – инвертору.
1,2 отверстия крепления подшипникового щита
3. вылет обмотки
4. отверстие центровки подшипникового щита; 5. обмотка
Ротор (вращающаяся часть) – короткозамкнутый.
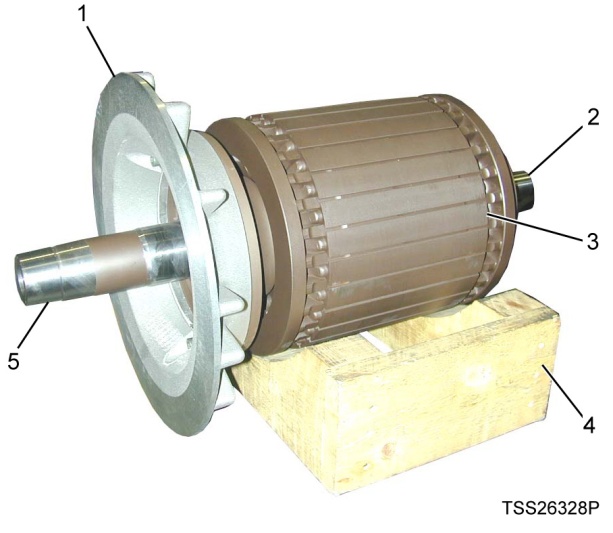 Собирается также из штампованных пластин электротехнической стали, определенной конфигурации, в результате чего на внутренней стороне сердечника ротора образуются пазы. В пазы ротора вставляют обмотку, которая изготовляется в виде цилиндрической(беличьей) клетки из медных или алюминиевых стержней. Стержни вставляются без изоляции. Концы стержней замыкают накоротко кольцами, которые изготавливают из того же материала. Обмотка ротора не соединяется с сетью и с обмоткой статора. Ротор насажен на вал тягового двигателя. Вентилятор устанавливается на конце вала ротора со стороны привода. Вал т/д изготавливается из высоколегированной стали. Имеет несколько шеек различной длинны и диаметра для посадки на них подшипниковых щитов, ротора, вентилятора.
Собирается также из штампованных пластин электротехнической стали, определенной конфигурации, в результате чего на внутренней стороне сердечника ротора образуются пазы. В пазы ротора вставляют обмотку, которая изготовляется в виде цилиндрической(беличьей) клетки из медных или алюминиевых стержней. Стержни вставляются без изоляции. Концы стержней замыкают накоротко кольцами, которые изготавливают из того же материала. Обмотка ротора не соединяется с сетью и с обмоткой статора. Ротор насажен на вал тягового двигателя. Вентилятор устанавливается на конце вала ротора со стороны привода. Вал т/д изготавливается из высоколегированной стали. Имеет несколько шеек различной длинны и диаметра для посадки на них подшипниковых щитов, ротора, вентилятора.
1- вентилятор; 2 и 5 – вал; 3 — беличья клетка; корпус статора.
Подшипниковые щиты


Подшипниковые щиты устанавливаются в статор с двух сторон. Подшипники щитов опираются на вал тягового двигателя.
Конструкция асинхронного тягового двигателя
В пазы статора укладывают обмотку, которая в простейшем случае состоит из трех катушек — фаз, сдвинутых в пространстве на 120 эл. градусов. Ротор асинхронного двигателя представляет собой цилиндр, набранный из штампованных листов электротехнической стали. На поверхности ротора имеются продольные пазы для обмотки. Листы сердечника ротора специально не изолируют, т.к. в большинстве случаев достаточно изоляции от окалины. В зависимости от типа обмотки роторы двигателей обычного исполнения делятся на короткозамкнутые и фазные.
Обмотка короткозамкнутого ротора представляет собой медные стержни, забитые в пазы. С двух сторон эти стержни замыкаются кольцами. Соединения стержней с кольцами осуществляется пайкой или сваркой. Чаще всего короткозамкнутую обмотку выполняют расплавленным, алюминием и литьем под давлением. При этом вместе со стержнями и кольцами отливаются и лопатки вентилятора.


ПРИНЦИП ОБРАЗОВАНИЯ ВРАЩАЮЩЕГОСЯ МАГНИТНОГО ПОЛЯ МАШИНЫ.
На статоре трехфазного двигателя расположены 3 обмотки (фазы), которые смещены в пространстве по отношению друг к другу на 120 эл. градусов. Токи, подаваемые в фазные обмотки, отодвинуты друг от друга во времени на 1/3 периода.
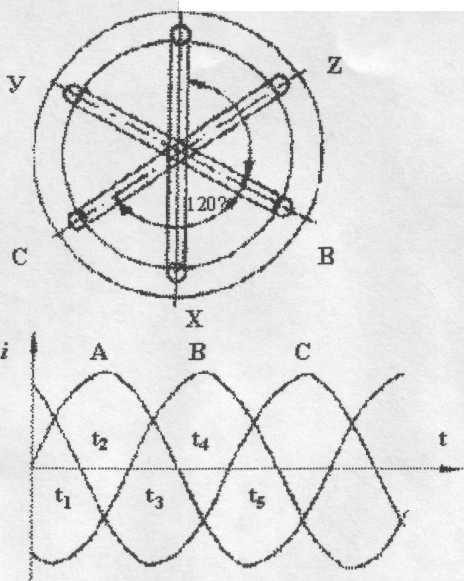
Токи в трехфазной обмотке
Образование вращающегося магнитного поля.
Асинхронные двигатели широко применяются в промышленности. Эти двигатели состоят из двух основных частей: неподвижной – статора и вращающейся – ротора. В асинхронном двигателе переменный трехфазный ток включается в обмотку статора, состоящую из трех самостоятельных частей. Как видно из графика изменений трехфазного тока напряжение достигает максимального значения не одновременно во всех трех фазах, а попеременно, через равные промежутки времени, то в одной, то в другой, то в третьей фазе. Следователь но, если включить такой ток в три обмотки, расположенные так, как это показано на 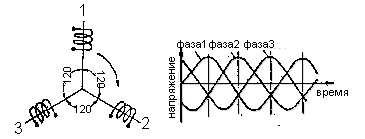 рисунке:
рисунке:
Максимальное значение магнитного потока будет создаваться то в первой, то во второй, то в третьей обмотке, соответственно максимальным значениям тока в фазах, подключенных к этим обмоткам. Магнитное поле, перемещающееся таким образом по замкнутому кругу, называется вращающимся магнитным полем.
Описанное создание вращающегося магнитного поля поясняется рис. Если подключить фазу к первой катушке обмотки двигателя, фазу 2 ко второй катушке, а фазу 3 к третьей катушке обмотки, то в момент времени t1 максимальный поток будет в первой катушке, так как в это время сила тока в фазе 1, подключенной к первой катушке, будет иметь максимальное значение. Затем сила тока в фазе 1 постепенно ослабевает и, переходя через нуль, меняет направление, в это время увеличивается значение силы тока в фазе 2 и к моменту времени t2 сила тока в фазе 2 достигает максимального значения, поэтому максимальный поток уже создастся не первой катушкой, а второй. Это в свою очередь означает, что магнитное поле повернулось на 120°. К моменту времени t3 максимум тока будет в фазе 3, а максимум потока будет создаваться третьей катушкой — магнитное поле повернулось еще на 120º.
К моменту времени t4 создается такая же картина поля, как и в момент времени t1,т. е. снова максимума ток достигает в фазе 1, а максимальный магнитный поток создается первой катушкой Это значит, что за время t1 — t2магнитное поле повернулось на 360° (совершило полный оборот).
Обмотка ротора асинхронного двигателя замкнута на себя, или на сопротивление. При неподвижном роторе и наличии тока в обмотке статора силовые линии вращающегося магнитного ноля пересекают неподвижные витки обмотки ротора, в результате чего в обмотке ротора появляется ЭДС и ток. Этот ток, взаимодействуя с полем статора, создает вращающий момент, стремящийся повернуть ротор в сторону вращения поля. Ротор двигателя начнет вращаться. По мере увеличения скорости ротора уменьшаются число пересекаемых силовых линий и ЭДС и, следовательно, ток ротора асинхронного двигателя. Однако ротор никогда не достигает скорости поля, а всегда вращается. Это отставание ротора от ноля статора называют скольжением. Чем больше нагрузка на валу двигателя, тем больше скольжение. Выражается скольжение в процентах или в относительных единицах.
Обычно асинхронные двигатели имеют при полной нагрузке скольжение 2—4%.
Скорость вращения ротора асинхронного двигателя определяется по формуле:

где n—скорость вращения ротора, об/мин;
f — частота питающей сети;
p— число пар полюсов;
s — скольжение.
ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННОГО ДВИГАТЕЛЯ.
Вращающееся магнитное поле статора пересекает проводники обмотки ротора и наводит в них ЭДС. Так как роторная обмотка замкнута, то в проводниках ее возникают токи. Ток каждого проводника, взаимодействуя с полем статора, создает электромагнитную силу – Fэм. Совокупность сил всех проводников обмотки создает электромагнитный момент М, который приводит ротор во вращение в направлении вращающего поля.
Частота вращения ротора n2 будет всегда меньше синхронной частоты n1 т.е. ротор всегда отстает от поля статора. Поясним это следующим образом. Пусть ротор вращается с частотой п2 равной частоте вращающегося поля статора n1. В этом случае поле не будет пересекать проводники роторной обмотки. Следовательно, в них не будет наводиться ЭДС и не будет токов, а это значит, что вращающий момент М = 0. Таким образом, ротор асинхронного двигателя принципиально не может вращаться синхронно с полем статора. Разность между частотами поля статора n2 и ротора n1 называется частотой скольжения Δn:
Отношение частоты скольжения к частоте поля называется скольжением:

 В общем случае скольжение в асинхронном двигателе может изменяться от нуля до единицы. Однако номинальное скольжение SH обычно составляет от 0,01 до 0,1 %. Преобразуя выражение *), получим выражение частоты вращения ротора:
В общем случае скольжение в асинхронном двигателе может изменяться от нуля до единицы. Однако номинальное скольжение SH обычно составляет от 0,01 до 0,1 %. Преобразуя выражение *), получим выражение частоты вращения ротора:
Обмотка ротора асинхронного двигателя электрически не связана с обмоткой статора. В этом отношении двигатель подобен трансформатору, в котором обмотка статора является первичной обмоткой, а обмотка ротора — вторичной. Разница состоит в том, что ЭДС в обмотках трансформатора наводится не изменяющимся во времени магнитным потоком, а ЭДС в обмотках двигателя — потоком постоянным по величине, но вращающимся в пространстве. Эффект в том и в другом случаях будет одинаковым. В отличие от вторичной обмотки трансформатора, неподвижной, обмотка ротора двигателя вместе с ним вращается. ЭДС роторной обмотки, в свою очередь, зависит от частоты вращения ротора. В этом нетрудно убедиться, анализируя процессы, протекающие в асинхронном двигателе. Синхронная частота вращения магнитного поля статора перемещается относительно ротора с частотой скольжения Δn. Она же наводит в обмотке ротора ЭДС Е2, частота которой f2 связана со скольжением S:
Приняв величину номинального скольжения порядка 0,01-0,1, можно подсчитать частоту изменения ЭДС в роторной обмотке, которая составляет 0,5-5 Гц (при ^=50 Гц).
Линейный асинхронный двигатель — Linear induction motor


Линейный асинхронный двигатель ( LIM ) представляет собой переменный ток (переменный ток), асинхронный линейный двигатель , который работает по тем же принципам, что и общих других асинхронных двигателей , но , как правило , предназначены для непосредственного движения производят по прямой линии. Как правило, линейные асинхронные двигатели имеют конечную длину первичной или вторичной обмотки, что создает конечные эффекты, тогда как обычный асинхронный двигатель расположен в бесконечной петле.
Несмотря на свое название, не все линейные асинхронные двигатели производят линейное движение; некоторые линейные асинхронные двигатели используются для вращения большого диаметра, когда использование непрерывной первичной обмотки было бы очень дорогостоящим.
Как и роторные двигатели, линейные двигатели часто работают от трехфазного источника питания и могут поддерживать очень высокие скорости. Однако есть конечные эффекты, которые уменьшают силу двигателя, и часто невозможно установить коробку передач, чтобы найти компромисс между силой и скоростью. Таким образом, линейные асинхронные двигатели часто менее энергоэффективны, чем обычные роторные двигатели для любой заданной требуемой выходной силы.
LIM, в отличие от своих вращающихся аналогов, может давать эффект левитации. Поэтому они часто используются там, где требуется бесконтактное усилие, где требуются низкие эксплуатационные расходы или где рабочий цикл невелик. Их практическое использование включает магнитную левитацию , линейные двигатели и линейные приводы. Они также использовались для перекачки жидких металлов.
СОДЕРЖАНИЕ
- 1 История
- 2 Строительство
- 3 Принципы
- 4 Силы
- 4.1 Тяга
- 4.2 Конечный эффект
- 4.3 Левитация
- 5 Производительность
- 6 применений
- 7 См. Также
- 8 ссылки
История
Историю линейных электродвигателей можно проследить, по крайней мере, с 1840-х годов до работы Чарльза Уитстона в Королевском колледже в Лондоне, но модель Уитстона была слишком неэффективной, чтобы быть практичной. Возможный линейный асинхронный двигатель описан в патенте США 782312 (1905; изобретатель Альфред Цеден из Франкфурта-на-Майне) и предназначен для привода поездов или лифтов. Немецкий инженер Герман Кемпер построил рабочую модель в 1935 году. В конце 1940-х годов профессор Эрик Лейтвейт из Имперского колледжа в Лондоне разработал первую полноразмерную рабочую модель.

В одностороннем варианте магнитное поле может создавать силы отталкивания, которые отталкивают проводник от статора, левитируя его и неся в направлении движущегося магнитного поля. Лэйтуэйт назвал более поздние версии магнитной рекой . В этих версиях линейного асинхронного двигателя используется принцип, называемый поперечным потоком, когда два противоположных полюса размещаются рядом. Это позволяет использовать очень длинные опоры и, таким образом, обеспечивает высокую скорость и эффективность.
Строительство
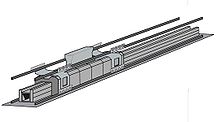
Первичная обмотка линейного электродвигателя обычно состоит из плоского магнитного сердечника (обычно ламинированного) с поперечными прорезями, которые часто имеют прямой разрез с катушками, уложенными в прорези, причем каждая фаза дает переменную полярность, так что разные фазы физически перекрываются.
Вторичная обмотка часто представляет собой лист алюминия, часто с железной опорной пластиной. Некоторые модули LIM являются двухсторонними, с одной первичной обмоткой на каждой стороне вторичной, и в этом случае железная подкладка не требуется.
Существует два типа линейных двигателей: короткая первичная обмотка , где катушки усечены короче вторичной обмотки, и короткая вторичная обмотка , где токопроводящая пластина меньше. Короткие вторичные LIM часто наматываются как параллельные соединения между катушками одной и той же фазы, тогда как короткие первичные обмотки обычно наматываются последовательно.
Первичные обмотки ЛАД с поперечным потоком имеют серию сдвоенных полюсов, расположенных бок о бок в поперечном направлении с противоположными направлениями намотки. Эти столбы обычно изготавливаются либо из ламинированной опорной пластины подходящего размера, либо из ряда поперечных U-образных сердечников.
Принципы

В этой конструкции электродвигателя сила создается линейно движущимся магнитным полем, действующим на проводники в поле. Любой проводник, будь то петля, катушка или просто кусок металлической пластины, помещенный в это поле, будет иметь вихревые токи, индуцированные в нем, таким образом создавая противоположное магнитное поле в соответствии с законом Ленца . Два противоположных поля будут отталкивать друг друга, создавая движение, когда магнитное поле пронизывает металл.
п s знак равно 2 ж s / п < displaystyle n_ = 2f_ / p> 
где f s — частота питающей сети в Гц, p — число полюсов, а n s — синхронная скорость магнитного поля в оборотах в секунду.
Картина бегущего поля имеет скорость:
v s знак равно 2 т ж s < displaystyle v_ = 2tf_ >
где v s — скорость линейного бегущего поля в м / с, а t — шаг полюсов.
Для скольжения s скорость вторичной обмотки линейного двигателя определяется выражением
v р знак равно ( 1 — s ) v s < displaystyle v_ = (1-s) v_ >
Толкать

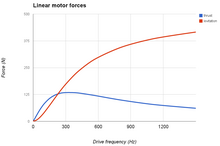
Привод, создаваемый линейными асинхронными двигателями, чем-то похож на обычные асинхронные двигатели; движущие силы показывают примерно аналогичную характеристическую форму относительно скольжения, хотя и модулируемую концевыми эффектами.
Существуют уравнения для расчета тяги двигателя.
Конечный эффект
В отличие от асинхронного двигателя круглого сечения, линейный асинхронный двигатель демонстрирует «конечные эффекты». Эти конечные эффекты включают потери производительности и эффективности, которые, как полагают, вызваны уносом магнитной энергии и потерями в конце первичной обмотки из-за относительного движения первичной и вторичной обмоток.
С короткой вторичной обмоткой поведение почти идентично роторной машине, при условии, что она имеет длину как минимум два полюса, но с коротким первичным снижением тяги, которое происходит при малом скольжении (ниже примерно 0,3), пока оно не станет восьми полюсов или больше.
Однако из-за конечных эффектов линейные двигатели не могут «работать налегке» — обычные асинхронные двигатели могут работать с двигателем с почти синхронным полем в условиях низкой нагрузки. Напротив, конечные эффекты создают гораздо более значительные потери с линейными двигателями.
Левитация
Кроме того, в отличие от роторного двигателя, показана электродинамическая сила левитации , она равна нулю при нулевом скольжении и дает примерно постоянную величину силы / зазора при увеличении скольжения в любом направлении. Это происходит в односторонних двигателях, и левитация обычно не возникает, когда на вторичной обмотке используется железная опорная пластина, поскольку это вызывает притяжение, которое подавляет подъемную силу.
Представление
Линейные асинхронные двигатели часто менее эффективны, чем обычные роторные асинхронные двигатели; конечные эффекты и относительно большой воздушный зазор, который часто присутствует, обычно уменьшают силы, возникающие при той же самой электрической мощности. Аналогичным образом, эффективность во время работы генератора (электрическое торможение / рекуперация) с линейным асинхронным двигателем была отмечена как относительно низкая из-за конечных эффектов. Большой воздушный зазор также увеличивает индуктивность двигателя, что может потребовать больших и более дорогих конденсаторов.
Однако линейные асинхронные двигатели могут избежать необходимости в коробках передач и аналогичных трансмиссиях, которые имеют свои собственные потери; а практическое знание важности фактора качества может минимизировать влияние большего воздушного зазора. В любом случае энергопотребление не всегда является самым важным соображением. Например, во многих случаях линейные асинхронные двигатели имеют гораздо меньше движущихся частей и очень низкие эксплуатационные расходы. Кроме того, использование линейных асинхронных двигателей вместо вращающихся двигателей с поворотно-линейной передачей в системах управления движением обеспечивает более широкую полосу пропускания и точность системы управления , поскольку поворотно-линейные передачи вносят люфт, статическое трение и / или механическую податливость в система управления.
Использует

Из — за этих свойств, линейные двигатели часто используются в магнитной подвеске в движение, как и в японской Linimo магнитной левитации поезда линии вблизи Нагоя .

Первой в мире коммерческой автоматизированной системой на магнитной подвеске был низкоскоростной шаттл на магнитной подвеске, который курсировал от терминала аэропорта Бирмингема до ближайшего международного железнодорожного вокзала Бирмингема в период с 1984 по 1995 год. Длина пути составляла 600 метров (2000 футов), а поезда «летели» на высоте 15 миллиметров (0,59 дюйма), левитировали электромагнитами и приводились в движение линейными асинхронными двигателями. Он проработал почти одиннадцать лет, но проблемы с устареванием электронных систем сделали его ненадежным в последующие годы. Один из оригинальных вагонов теперь выставлен на выставке Railworld в Питерборо вместе с паровозом RTV31 .
Однако линейные двигатели были использованы независимо от магнитной левитации, таких как Токио «s Линия Оэдо . Innovia Метро Бомбардье является примером автоматизированной системы , которая использует LIM движение вперед. Самая протяженная система скоростного транспорта , использующая такую технологию, — это метро Гуанчжоу, протяженность которого составляет около 130 км (81 миль) с использованием передвижных поездов метро LIM вдоль линий 4 , 5 и 6 . Они также используются организацией Tomorrowland Transit Authority PeopleMover на курорте Walt Disney World Resort в Бэй-Лейк , штат Флорида, и в транспортном средстве Subway в межконтинентальном аэропорту Джорджа Буша в Хьюстоне , штат Техас , которые используют тот же дизайн.
Технология линейных асинхронных двигателей также используется в некоторых американских горках . В настоящее время это все еще непрактично для уличных трамваев , хотя теоретически это можно сделать, закопав его в канале с прорезями.

Помимо общественного транспорта, вертикальные линейные двигатели были предложены в качестве подъемных механизмов в глубоких шахтах , и использование линейных двигателей в приложениях управления движением растет . Они также часто используются на раздвижных дверях, например, в трамваях с низким полом, таких как Alstom Citadis и Eurotram .
Также существуют двухосные линейные двигатели. Эти специализированные устройства использовались для обеспечения прямого движения по оси X — Y для точной лазерной резки ткани и листового металла, автоматизированного черчения и формирования кабеля. Кроме того, линейные асинхронные двигатели с цилиндрической вторичной обмоткой использовались для обеспечения одновременного линейного и вращательного движения для монтажа электронных устройств на печатных платах.
Большинство используемых линейных двигателей — это LIM (линейные асинхронные двигатели) или LSM (линейные синхронные двигатели). Линейные двигатели постоянного тока не используются, поскольку они более дорогостоящие, а линейный SRM имеет низкую тягу. Таким образом, для длительных пробегов на тяговых усилиях наиболее предпочтителен LIM, а для краткосрочных — LSM.
Линейные асинхронные двигатели также использовались для запуска самолетов, система Westinghouse Electropult в 1945 году была ранним примером, а электромагнитная система запуска самолетов (EMALS) должна была быть поставлена в 2010 году.
Линейные асинхронные двигатели также используются в ткацких станках, магнитная левитация позволяет катушкам плавать между волокнами без прямого контакта.
Первый безканатный лифт, изобретенный ThyssenKrupp, использует линейный индукционный привод.
Синхронный и асинхронный двигатель отличия
Подписка на рассылку
ВКонтактеFacebookokTwitterYouTubeInstagramЯндекс.ДзенTikTok

